シンプルさと使いやすさの点で既存のプログラミング方法を比較します。 選択したモーションセンサーの特性の概要から記事を開始することをお勧めします。
使用するメインセンサーはPIRモーションセンサーです[3] 。
PIRセンサーは小さく、安価で、消費電力が少なく、Arduinoなどのハードウェアプラットフォームと互換性があります。
赤外線を検出する一対の焦電センサーを使用します。 最大6メートルの範囲で、プロジェクトに十分です。

さらに、緑と赤のLEDが必要です。 コード、抵抗器、ブレッドボード:接続を完了するには、ワイヤーとブレッドボードの束が必要です。 220オームの2つの抵抗と10 kOhmの1つの抵抗も必要です。
次のコンポーネントはArduinoボード、Arduino Unoボードです。 Arduinoボードをコンピューターに接続するには、USBケーブルを使用します。
ソフトウェアフロー開発
ハードウェアシステムでの作業を開始する前に、ブロック図の形式でプロジェクトをスケッチする必要があります。 図に示すサイクルでプロジェクトを使用します。
プロジェクトは、動きが検出されるとすぐにサイクルで実行され、対応するLEDアクションが実行されます。

1つのArduino命令で、LEDをオンまたはオフにできます。
点滅操作を実行するには、PIRセンサー出力が落ち着くように、アクションとアクションの間の時間遅延を使用してオンとオフのアクションを繰り返し実行する必要があります。
両方のプログラミング方法のコードを記述するときに同じストリームを使用します。
ハードウェアシステムの設計
このようなプロジェクトのハードウェアを設計する最も簡単な方法は、プロトタイプを作成することです。 この目的で使用されるツールは、Fritzingと呼ばれます。
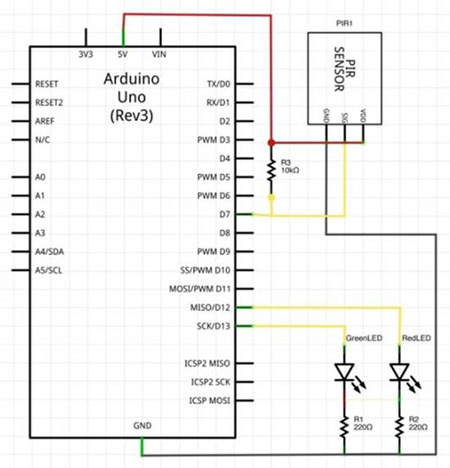
Fritzingは、Arduinoおよびその他の一般的なオープンソースハードウェアプラットフォームを積極的にサポートしています。 次の図は、Fritzingを使用して開発されたプロジェクトの図を示しています。 図に示すようにコンポーネントを接続します。

回路の組み立てを完了するには、次の手順を実行します。
- VCC(+ 5V)とアースをArduinoからブレッドボードに接続します。
- 赤色LEDのアノード(長いワイヤ)をArduinoボードのデジタルピン12に接続します。 220オームの抵抗を使用して、赤色LEDのカソード(短いワイヤ)を接地します。
- 緑色のLEDのアノード(長いワイヤ)をArduinoボードのデジタルピン13に接続します。 220オームの抵抗を使用して、緑色のLEDのカソード(ショートワイヤ)を接地します。
- PIRセンサーのVDDをレイアウト上のVCCに接続します。 同じ配線色を使用して、同じカテゴリの接続を表します。 これは、回路のトラブルシューティングに大いに役立ちます。
- 10kΩ負荷抵抗を使用して、PIRセンサーの信号(中央ピン)をArduinoデジタル軸7に接続します。
以下は、以前に開発した電子回路の概略図です。 チャートは、Fritzingを使用しても取得されます。
これで、システムはArduinoプログラムを起動する準備ができました。
試験装置の接続
接続が完了したら、プログラミングセクションに直接進みます。 回路の接続とセンサーの状態を確認するために使用することをお勧めします。
ArduinoボードにはすでにStandardFirmataスケッチが装備されていると想定しています。 それ以外の場合は、StandardFirmataスケッチをArduinoボードにアップロードする必要があります。
回路の実装をテストする最良の方法は、前の記事で説明したFirmataテストプログラムを使用することです。 プロジェクトのセットアップによれば、PIRセンサーはArduinoのピン7にイベントを送信します。
テストプログラムで、ピン7のタイプを入力に変更し、センサーに手を振ると、次のスクリーンショットに示すようにピンの状態を確認できます。

ピン12と13を出力ピンとして設定し、ボタンを切り替えてピンのステータスを設定して、LED接続を確認しましょう。 ボタンを切り替えたときにLEDが点滅する場合、接続は問題なく機能しています。
方法1-Arduino Standalone Sketchを使用する
プロジェクトを開始するために、
- Arduino IDEを開きます。
- [ファイル]メニューで、新しいアルバムを開きます。
- 次のArduinoコードをスケッチにコピーして保存します。
コードint pirPin = 7; //Pin number for PIR sensor int redLedPin = 12; //Pin number for Red LED int greenLedPin = 13; //Pin number for Green LED void setup(){ Serial.begin(9600); pinMode(pirPin, INPUT); pinMode(redLedPin, OUTPUT); pinMode(greenLedPin, OUTPUT); } void loop(){ // Function which blinks LED at specified pin number void blinkLED(int pin, String message){ digitalWrite(pin,HIGH); Serial.println(message); delay(1000); digitalWrite(pin,LOW); d int pirVal = digitalRead(pirPin); if(pirVal == LOW){ //was motion detected blinkLED(greenLedPin, "No motion detected."); } else { blinkLED(redLedPin, "Motion detected."); } } elay(2000); }
- スケッチをコンパイルしてArduinoボードにアップロードします。
他のArduinoプログラムと同様に、コードには2つの必須機能があります:setup()およびloop()。 また、後で説明する特定のアクション用のカスタムblinkLED()関数もあります。
セットアップ()関数
前のコードスニペットでは、プログラムの開始時に変数が出力Arduinoに割り当てられました。 setup()関数で、これらの変数を設定して入力または出力の両方を定義しました:
pinMode(pirPin, INPUT); pinMode(redLedPin, OUTPUT); pinMode(greenLedPin, OUTPUT);
ここで、pirPin、redLedPin、greenLedPinはそれぞれデジタルピン7、12、13です。 同じ機能で、9600 bpsのシリアル接続用にArduinoボードも構成しました。
Serial.begin(9600);
ループ()関数
loop()関数では、pirPinデジタル接点からの入力信号を繰り返し制御して、動きを検出します。 この接点の出力は、動きが検出されるとHIGHになり、そうでない場合はLOWになります。
このロジックは、単純なif-elseステートメントを使用して実装されます。 この条件が満たされると、関数はユーザー定義関数blinkLED()を呼び出して、LEDで対応するアクションを実行します。 カスタム関数は、プログラミング言語の非常に重要な側面です。
Arduinoカスタム機能の使用
関数は、同じアクションを実行するためにコードセグメントが再実行されるときに使用されます。 ユーザーは、ユーザー定義関数を作成して、コードを整理したり、繰り返しアクションを実行したりできます。 ユーザー定義関数を正常に使用するには、ユーザーは必要なArduino関数(loop()、setup()、またはこれらの必須関数につながるその他の関数)から呼び出す必要があります。
return-type function_name (parameters){ # Action to be performed Action_1; Action_2; Return expression; }
以下は、プロジェクトコードで使用されたカスタム関数です。
void blinkLED(int pin, String message){ digitalWrite(pin,HIGH); Serial.println(message); delay(1000); digitalWrite(pin,LOW); delay(2000); }
プロジェクトでは、loop()関数から呼び出されたとき、blinkLED()関数は値を再構成しません。 したがって、戻り値の型は無効です。 関数を呼び出すときに、ピン番号とメッセージをパラメーターとして渡します。
blinkLED(greenLedPin, "No motion detected.");
これらのパラメータは、blinkLED()関数を使用して、実行されたアクション(シリアルポートでメッセージを記録し、LEDのステータスを設定)で使用されます。 この関数は、delay()関数を使用して点滅の遅延も導入します。
テスト中
設計されたシステムは、Firmataテストプログラムによる手動入力を使用して、「ハードウェアテスト」セクションでテストされました。 プロジェクトが自律的かつ繰り返して客観的なタスクを実行することを確認する必要があります。
USBポートをコンピューターに接続した状態で、IDEArduino環境から[ツール]メニューに移動して、シリアル監視ツールを開く必要があります。 SerialMonitorまたはCtrl + Shift + Mを押します。表示されているようなメッセージがシリアルモニター画面に表示されます。

アクションを実行するblinkLED()関数を作成するとき、シリアルポートを介してラインを作成するアクションを含めました。 PIRセンサー上で手を動かして、PIRセンサーが動きを検出できるようにします。
このイベントにより、システムは赤色のLEDを点滅させ、動きによって検出されたラインをシリアルモニターに表示します。 動きがない場合は、PIRセンサーを介した次の動きが検出されるまで、緑色のLEDがしばらく点滅します。
方法2-PythonとFirmataを使用する
任意のエディターを使用できますが、拡張子が.pyのファイルが保存されていることを確認してください。 次のコード行を新しいファイルにコピーし、test.pyとして保存します。
#!/usr/bin/python a = "Python" b = "Programming" print a + " "+ b
このファイルを実行するには、test.pyファイルが保存されているターミナルで次のコマンドを実行します。
$ python test.py
ターミナルに印刷されたPythonProgrammingテキストが表示されるはずです。 ご覧のとおり、ファイルは#!で始まります。 / Usr / bin / python、これはデフォルトのPythonインストール場所です。 この行をPythonコードに追加すると、ターミナルから直接Pythonファイルを実行できます。 Unixベースのオペレーティングシステムでは、次のコマンドを使用してtest.pyを実行可能にする必要があります。
$ chmod +x test.py
これで、ファイルは実行可能であるため、次のコマンドを使用してファイルを直接実行できます。
$. / test.py
次のコードスニペットを使用して新しいPythonファイルを作成し、実行します。 オペレーティングシステムに合わせてポート変数の値を変更する必要があります。
タイトルスポイラー
# pir_1.py # import pyfirmata from time import sleep # Blink def blinkLED(pin, message): print (message) board.digital[pin].write(1) sleep(1) board.digital[pin].write(0) sleep(1) # pyFirmata port = 'COM3' board = pyfirmata.Arduino(port) # , it = pyfirmata.util.Iterator(board) it.start() # Define pins pirPin = board.get_pin('d:7:i') print(pirPin) redPin = 12 greenPin = 13 # Check for PIR sensor input while True: # Ignore case when receiving None value from pin value = pirPin.read() while value is None: pass print(value) if value is True: # Perform Blink using custom function blinkLED(redPin, "Motion Detected") else: blinkLED(greenPin, "No motion Detected") # board.exit()
このコードには、pyFirmataメソッドと、点滅動作を実行するPython関数という2つの主要なプログラミングコンポーネントがあります。 プログラムはモーションイベントを繰り返し検出し、点滅動作を実行します。
このメソッドでは、whileステートメントを実装して、ユーザーが手動で終了するまでプログラムをループ状態に保ちます。 キーボードショートカットCtrl + Cを使用してコードを完成できます。
pyFirmataメソッドを使用する
Arduinoボードを変数として初期化することにより、ArduinoボードとFirmataプロトコルの使用を開始する必要があります。 ユーザーがボードをPython変数に割り当てることができるpyFirmataメソッドは次のとおりです。
board = pyfirmata.Arduino(port)
変数に値が割り当てられると、この変数を使用してピンの読み取りや出力への信号の送信など、さまざまなアクションを実行できます。 連絡先にロールを割り当てるには、get_pin()メソッドが使用されます。 次のコード行では、dはデジタル出力を表し、7は出力番号を表し、iは出力のタイプが入力出力であることを意味します。
pirPin = board.get_pin('d:7:i')
ピンとその役割が変数に割り当てられると、この変数を使用して出力の値を読み書きできます。
Value = pirPin.read ()
次のコードで説明するように、特定の出力にデータを直接書き込むことができます。
board.digital[pin].write(1)
ここで、write(1)メソッドはHIGH信号を出力に送信します。
Python関数を使用する
Python関数はdefキーワードで始まり、その後に関数の名前と入力パラメーターまたは引数が続きます。 関数の定義はコロン(:)で終わり、そのインデントの後に続きます。 returnステートメントは関数を終了します。 また、この式を関数が呼び出された場所に渡します。
returnステートメントが式なしで保存されている場合、Noneの戻り値を渡したと見なされます。
def function_name(parameters): action_1 action_2 return [expression]
前の構造を使用して、反復タスクを実行するカスタム関数を作成できます。 このプロジェクトには、点滅するLEDを実行するblinkLED(ピン、メッセージ)機能があります。 この関数は、指定されたデジタルピンに1(高)と0(低)の値を送信し、端末にメッセージを出力します。 また、点滅動作をシミュレートするために遅延を導入します。
defblinkLED(pin, message): print message board.digital[pin].write(1) sleep(1) board.digital[pin].write(0) sleep(1)
テスト中
ターミナルでPythonコードを実行した後、テストを開始できます。 すべてがプロジェクトに従っている場合、ターミナルで次の出力を確認できるはずです。

PIRセンサーによって動きが検出されると、端末の動き検出ラインが見えるはずです。 Pythonを使用する利点は、Arduinoや電気回路を使用せずにPythonコードを変更するだけで、点滅速度の変更やLEDの役割の交換などの小さな変更ができることです。
結論
この作業で使用した2つのプログラミング手法によるプロジェクトの実際の実装結果の比較分析は、Arduinoスケッチのみを使用する手法が従来のマイクロコントローラープログラミングパラダイムを表していることを示しています。 このメソッドは実装が簡単ですが、Python-Arduinoインターフェースによって実現される拡張性に欠けています。 したがって、実際の使用のために、Python-Arduinoメソッドを選択します。