クールなロボットスタートアップを立ち上げてリードし、それをなんとか最初の販売に持ち込みました。 私の知る限り、私たちは他の同様のロシアのプロジェクトよりも進んでいますが、約2か月前、私はそれを去り、チームにコントロールを移しました。
この記事では、
-調査結果を共有する
-開発者/投資家としてプロジェクトに参加したい場合は、プロジェクトを推奨します
-フォークする場合は、技術文書をレイアウトします

手始めに、私たちがやったことについて少し。
このプロジェクトの目的は、人間の手に匹敵する機能を備えた安価なユニバーサルロボットを作成することでした。 同様の速度、搬送能力、精度-そして最新の産業用ロボットの10分の1の価格です。
現在、ロボットマニピュレーターが開発されている2つの主要な領域があります。
1つ目は、サイズが小さく、自由度が3〜4で、精度が低く、バックラッシュが大きく、その他の制約があるために人間の労働を置き換えることができないロボットです。 彼らの目的は、オタクや研究プロジェクトのためのおもちゃです。 製造業者は、顧客の好奇心を満たすのに十分な設計の技術的な複雑さと価格とのバランスをとることを余儀なくされています。
2番目の方向は産業用ロボット工学であり、たとえば自動車産業で部品の組み立て、溶接、塗装に広く使用されています。 これらは、人間には絶対にアクセスできない絶対に驚くべき特性(例えば、 再現性-0.05mm )を備えたロボットです。 このようなロボットを使用すると、基本的に手作業では達成できない速度と精度で操作を実行できます。 また、寿命が長く、仕事の中断が少ないため、同様の機能を実行する人よりも安くなる場合があります。
これらの2つのグループの間には、価格の差が2桁(10k-1m RUB)あり、それほど印象的ではありませんが、重要な特性の差があります。 私たちが目指したのは、これら2つのグループの間にあるニッチでした。
肉体労働が使用される巨大な市場があり、これの唯一の理由は、機能の点で人々が産業用ロボットの同様のグループよりも安いということです。 例は、ファーストフードでの調理です。 アルゴリズムの形式で簡単に記述できるこのアクティビティでは、高い精度や速度は必要ありません。 ロボットが市場に登場し、コストが未熟な労働者の月給数回分に相当し、その作業の少なくとも半分を遂行する能力がある場合、彼は需要があります。
これらの前提条件に基づいて、ターゲットの技術的特性を決定し、それらを最低価格で実現できるソリューションを選択しました。 6自由度(動きを伝達するための最小量)、3〜5キログラムの持ち上げ能力、1〜2ミリメートルの範囲での動きの再現性(負荷の有無にかかわらず)、物理的寸法と手に匹敵する速度のロボットが必要でした人。 目標コストは約150k RUBです。
つまり、これらの目標を達成しました。 いくつかの予約で、限られた数の状況で、しかし、私たちは正しい軌道に乗っていると言うことができる結果がありました。
ロボットは実際の条件でテストされました-夏には、約3か月間、ロボットボール展示会で働いて、スタンドでハンバーガーモデルを収集しました。
次に、受信したデータに基づいて、エラーを修正し、近代化を実施し、最近ロボットは展示会に戻り、現在同じロボットを使用しています。
また、ロボットへの需要があることも証明しました。広告が最小限のランディングページにより、1週間に多くの電話と複数の購入リクエストを受け取ることができ、販売を開始するのに十分です。
それにもかかわらず、私はプロジェクトを辞めることにしました。
努力と結果の可視性を考慮すると、これは難しい決定でしたが、私が行かなければならなかった道が喜びにつながることはほとんどないことに気付きました。 次の各ステップは前のステップと同じくらい困難でした。パスが進むほど、未来は長く見えました。
終了するために、1つの写真に描写できるいくつかの理由がありました
しかし、詳しく説明する場合:
-条件が遅れています。 初めて行う技術的に複雑なプロジェクトの実装のタイムラインを評価する方法は広く知られています。考えられるすべての問題を含む、時間内で最も否定的な推定値を取得します。 そして、それを3倍します。 残念ながら、これは事実です。
-ビジョンは変化しています。 顧客が何を必要としているかという考え方は、開発の開始時と終了時では大きく異なります。 重要なのは、潜在的な顧客が実際のプロトタイプを見た後にのみいくつかの要件を定式化できるということだけではなく、これらの要件を満たすには多くの場合大幅な変更が必要です。 プロトタイプの準備が整い、実際の条件でテストが開始された後にのみ、いくつかの技術的側面(信頼性など)が前面に出始めます。
-販売を開始する段階であると思われていた段階は、今では中間段階のように見えます。 ある意味では、これは前の段落の続きです。 期待どおりに機能するプロトタイプを取得するだけでは不十分です。 同じ信頼性の問題は、機能特性に影響を与えないが、多くの時間、お金を要し、製品価格の上昇につながる大幅な設計改善を必要とします。 さらに、特定の問題が一度だけ解決されるという確実性はほとんどありません。多くの場合、これは障害統計からしか理解できません。これは、友好的な近くのサイトで収集する方が優れているため、潜在的な顧客の範囲が大幅に狭まり、結果として、自給自足の期限が迫られます。
-仕事を大幅に加速するには、資金を増やす必要があります。 同時に、自給自足の日付は、未来へとさらにシフトしています。
これらの問題はすべて、次のようなさまざまな理由で発生する可能性があります。
1.プロジェクト管理のエラー(一部。ただし、現在見ているものはプロジェクトにとって致命的ではありませんでした)
2.マッチに失敗したチーム(間違いありません)
3.柔軟性の欠如(一部。私たちは、プロジェクトが自給自足の境界のどこかで生き残ることを可能にする追加の方向(ギアボックスの生産)を開発するには遅すぎました)
4.プロジェクトの範囲とそれに割り当てられたリソースとの不一致(主なことは信じている)
プロジェクト中に私が下した結論:
-本当に安定した資金の世話をするか、できるだけ早くそれに応じて停止しようとします。 初めてプロジェクトを行う場合、予算がどうであれ、それを達成することはできません。 私たちの場合、資金の源は、共同設立者が主たる職場で受け取った給料でした。 これにより、外部要因に関係なくプロジェクトを開発できました。
-締め切りは重要です。 目標とペナルティが達成されない場合、一意に特定します。これにより、より効率的な作業が促進されます。 制裁の厳しさは最初の作動後に殺すべきではありませんが、期限の切れ目は、目標の設定やその実施の監視に何か問題があることを示す重大な兆候です。
-チームは目標よりも重要です。 誤った初期仮定があったとしても、強力なチームによって与えられた柔軟性により、深刻な負の結果なしに代替案を見て方向を変えることができます
プロジェクトを終了したにも関わらず、私は行われた仕事に責任感を感じており、私たちのエンジニアが行った仕事ができるだけ多くの人々を助けることを望んでいます。 プロジェクトに残っている人々と同意して、私はあなたがそれについてあなた自身の意見を述べるのを助けることができる技術文書を投稿しています。
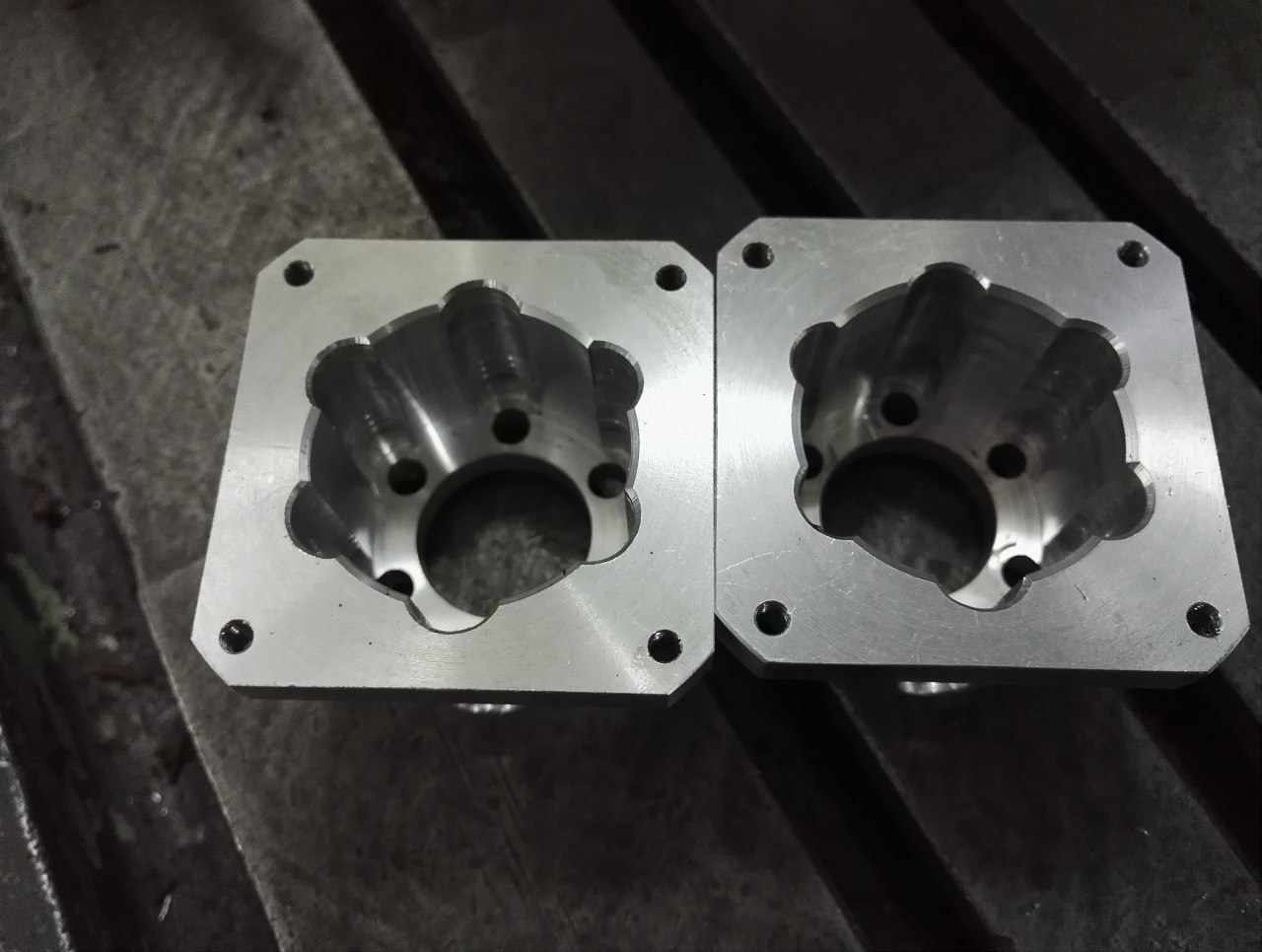
ロボットのすべての機械部品は、当社が独自に設計および製造しました。 これにより、設計を試すことができましたが、開発時間は大幅に増加しました。
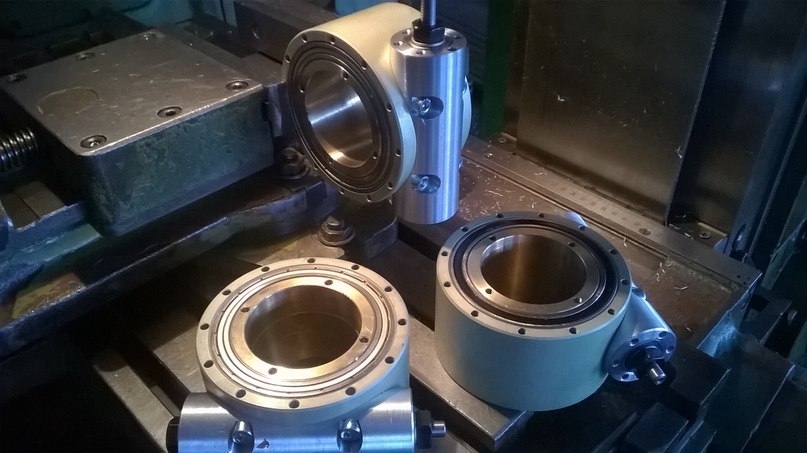


他のロボットプロジェクトに固有ではない機能が少なくとも3つありました。
1.サーボの代わりにステッピングモーター
2.遊星歯車または波の代わりにウォームギア
3.フィードバックのほぼ完全な欠如
一緒に使用すると、これらの改善により建設コストが大幅に削減されました。
ウォームギアボックスは、従来、ロボット工学では不十分な精度であると考えられていますが、優れた機器で製造し、いくつかのトリック(軸のアプローチでバックラッシュをサンプリングするなど)を使用する場合、私たちの目的に十分な特性を得ることができます。 ただし、ウォームギアボックスは非常に安価です。 大量生産の場合、従来のロボット工学で使用されていたギアボックスよりもはるかに安価です。 さらに、非常に便利なプロパティが1つあります。出力軸に大きな負荷がかかっても、入力軸がスクロールすることはありません。 これにより、衝撃荷重の問題が解消されます。それらはエンジンの軸に伝達されず、電源をオフにしても、ロボットは静止したままになります。
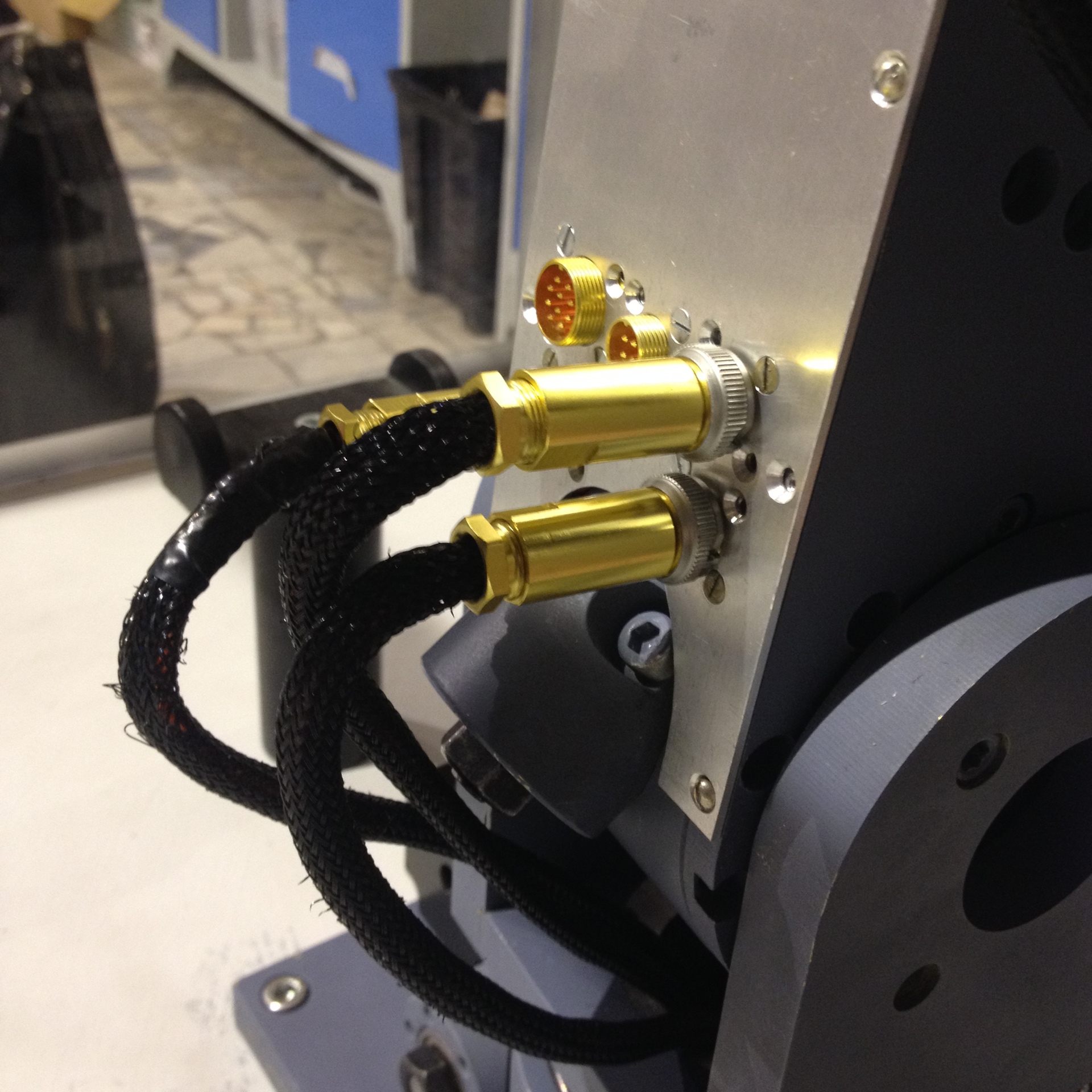
ステッピングモーターは高価なエンコーダーを排除します。 ロボットは常に、その場所を「知りません」。 エンドセンサーのみがあり、各軸の極端な位置に自動的に移動できます。 ただし、初期位置と実行されたステップ数がわかれば、現在位置を正確に計算できます。 このアプローチの欠点は、ステッピングモーターに典型的な追跡不可能なスキップステップの問題です。 ただし、負荷を観察し、エンジンをスムーズに加速/ブレーキすると、問題を実質的に回避できます。 まだ発生しているこれらの省略は通常、単一のサイクルでは重要ではありません。 各動作サイクルの終わりに初期位置に戻る(エンドセンサーがトリガーされる前に)ことで、エラーの蓄積が回避されます。
リンクを使用すると、ロボットの3Dモデル、図面、および開発履歴を明らかにする写真/ビデオを見つけることができます。 プロジェクトに参加することを決めた場合(チームの連絡先は添付ファイルに含まれています)、または同じデザインの独自のブランチを開発したい場合、私は喜んでいます。
ハードウェアプロジェクトへの参加はエキサイティングな経験であり、私の決定にもかかわらず、私はそれをすべての人にお勧めします。 あなたが信じているものを取り、それをビジネスに変えてみてください。 それは私にとって非常に興味深いものでしたし、あなたにとっても同様に興味深いものになることを願っています。