E91
少し領土...
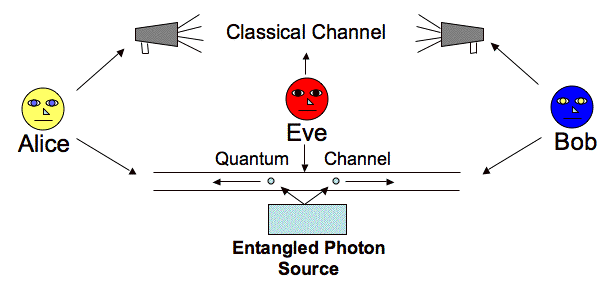
このプロトコルは、1991年にArthur Eckertによって開発されました。 また、Einstein-Podolsky-Rosenパラドックスに基づいているため、EPR(Einstein-Podolsky-Rosen)という名前もあります。
このプロトコルは、例えば、反対称偏光状態で生成された光子のペアを使用することを提案しています。 ペアの光子の1つを傍受しても、イブに情報はもたらされませんが、アリスとボブにとっては、会話が盗まれていることを示す信号です。
EPR効果は、球対称の原子が2人の観測者に向かって反対方向に2つの光子を放出するときに発生します。 光子は不定の偏光で放射されますが、偏光の対称性により、常に反対です。 この効果の重要な特徴は、光子の偏光が測定後にのみ知られるようになることです。 EPRに基づいて、Eckertはキーの送信と保管のセキュリティを保証するプロトコルも提案しました。 送信者は、多数のEPR光子ペアを生成します。 彼は各ペアから1光子を自分用に残し、2光子はパートナーに送信します。 さらに、登録効率が1に近い場合、送信者が偏光値1を受信すると、パートナーは値0を登録し、その逆も同様です。 このようにして、パートナーは必要に応じて同一の疑似ランダムコードシーケンスを取得できることは明らかです。
最初に、Nが最も混乱した光子のEPRペアを作成し、次に各ペアの1つの光子がアリスに送信され、もう1つの光子がボブに送信されます。 これらのEPRペアの3つの可能な量子状態は次のとおりです。

一般的な形式で次のように記述できます。

最後の式は、これらの3つの状態のそれぞれが一意にビット「0」と「1」をエンコードすることを明確に示しています。 その後、アリスとボブは、適切なプロジェクターを使用して、分離されたEPRペアの各部で測定を行います。

そして今、簡単な方法で...
アリスとボブは、BB84の場合と同様に、オープンチャネル内のパーティクルを測定するために使用した方法を説明します。
量子エンタングルメントの原理のおかげで、同じ基底を使用するとき、アリスとボブは反対の結果を期待する必要があり、失礼な場合、これはキーを取得するためにそれらの1つが結果を反転しなければならないことを意味します。 他の結果については、アリスとボブは、イブの存在のテストとしてベルの不等式をテストします。
Lo05
Lo05は、科学者H. H.-Kによって作成された量子暗号キー配布プロトコルです。 Ma K.とChen K.
量子鍵配布(QKD)により、2人のユーザー(アリスとボブ)がインターセプター(イブ)の存在下で絶対的なセキュリティで通信できます。
残念ながら、これらのエキサイティングな最近の実験はすべて、原則として、実生活の欠陥のために安全ではありません。 より具体的には、高減衰レーザーが光源としてよく使用されます。 ただし、ソースは複数の光子を含む信号を生成する場合があります。 これらの多光子信号は、多光子の分割を目的とした攻撃を含む強力な新しい攻撃の世界への扉を開きます。 たとえば、イブは、原則として、アリスによって放出される各信号の光子数を測定し、単一光子信号を選択的に抑制することができます。 彼女は多光子信号を分解し、1つのコピーを自分用に保持し、1つのコピーをボブに送信します。 今、イブはボブが持っているものと同じコピーを持っているので。 その結果、QKDの無条件のセキュリティ(BB84プロトコルなど)が完全に侵害されます。
したがって、2005年、Loグループは、既存のプロトコルのこのような欠点を回避するプロトコルを提案しました。 このプロトコルの背後にある考え方は、「トラップ状態」に基づいています。 つまり、通信チャネル内の盗聴者の存在を判断するためだけに使用される量子状態。
作成者自身が述べたように、この方法は現在のハードウェアに基づいて安全に実装できるため、他の方法よりも優れています。 基本的な考え方は、アリスがBB84で使用される標準的な状態に加えて、追加の「状態-餌」のセットを準備することです。 ベイトは盗聴を検出する目的でのみ使用され、標準のBB84状態はキーの生成に使用されます。 それらの主な違いは強度です。
餌で、信号の状態と状態が同じ特性(波長、同期情報など)を持っていると想像してみましょう。 したがって、Eveは餌の状態とシグナルの状態を区別できず、Evaが利用できる情報の一部のみがシグナル内の光子の数です。
2つの検出器のチャンスが等しいと仮定すると、エラー率は50%です。 信号の光子数がN≥1の場合、速度エラーの特定の頻度もあります。 つまり、正しく話すと、エラーは2つの部分で構成されます。
1.エラー検出
2.バックグラウンドの貢献
しかし、Lo05プロトコルの場合、これはそうではありません。 アリスとボブには、単一光子信号を分離する機能があり、さらに餌信号を使用すると、140 kmを超える距離でデータを転送できます。 また、このプロトコルは、小さな速度摂動にも耐性があり、理想的にはバックグラウンドエラーを排除します。 とりわけ、キー生成の速度は数倍に増加しました。より正確には、作成者は5倍の増加について話しています。 したがって、彼らは「両方の長所を活用する」と言うように、著者は距離を伸ばすだけでなく、小さい距離だけでなく比較的長い距離でも安全性を高めることができました。
PSそして、私の見たところ理想的であるにもかかわらず私が言うと約束した「BUT」については、アルゴリズムの実装は非常に難しく、その動作の基本原理は直流に関連しているため、多くのコストがかかります。
PSS Lo05アルゴリズムを説明するとき、方程式に意図的に説明をロードしませんでした。そうしないと、記事全体を書き直す必要があります。 ちなみに、必要に応じて、ここからリンクを取得できます。