
インテル®RealSense™テクノロジーは、2種類の深度カメラをサポートしています。フロントビューカメラ、ラップトップ、ウルトラブック、トランスフォーマー、およびオールインワンへのインストール用に設計された短距離(F200)。 リアビューカメラ、ロングレンジ(R200)は、タブレットへのインストール用に、また個別のリムーバブルデバイスとして設計されています。 どちらのカメラもスタンドアロンの周辺機器として利用でき、現在市販されているコンピューター機器に組み込まれています。 Intel RealSenseテクノロジーを使用してそのようなデバイスのアプリケーションを開発する場合、触覚フィードバックなしで3次元アプリケーションと対話する原理は、タッチコントロール用のアプリケーションを作成する開発者が慣れている作業モデルとは大きく異なることに注意してください。
この記事では、F200およびR200カメラのユーザーインターフェイスの一般的な原則と問題について説明し、Intel®RealSense™SDK APIを使用してアプリケーションに視覚フィードバックを埋め込む方法を示します。
ユーザーインターフェイスの作成およびF200カメラのAPIの使用に関する推奨事項
結果1.ラップトップおよびオールインワンの撮影ボリュームとインタラクションエリアを理解する
UIの使用例
図に示すユースケースを検討してください。 1。
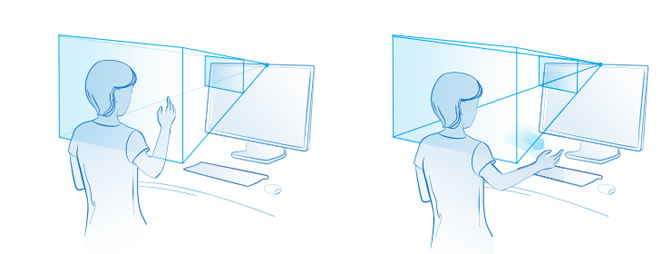
図1.体積撮影スペース
この図のカメラから発するピラミッドは、体積撮影空間またはカメラの視野と呼ばれるものです。 F200の場合、撮影スペースの容積は、カメラの水平軸と垂直軸からの偏差、およびユーザーとカメラの間の有効距離によって決まります。 ユーザーがこのピラミッドを超えて移動すると、カメラはインタラクションモードを追跡できなくなります。 参照用に、視野のパラメータを含む表を以下に示します。
| パラメータ | 範囲 |
|---|---|
| 有効なジェスチャー認識範囲 | 0.2〜0.6 m |
| 有効な顔認識範囲 | 0.35〜1.2 m |
| カラー画像カメラの視野、度 | 77 x 43 x 70(コーン) |
| 赤外線(IR)カメラの視野、度 | 90 x 59 x 73(コーン)
IRイルミネータの視野= n / d x 56 x 72(ピラミッド) |
| 色解像度 | 30フレーム/秒(fps)のフレームレートで最大1080p |
| 深度マップの解像度 | 60 fpsで最大640 x 480 |
F200デバイスの一部であるカラー画像キャプチャカメラと深度カメラの解像度は異なるため、開発者はアプリケーションで目的の動作モードの撮影スペースのボリュームを考慮する必要があります。 上記の表に示すように、ジェスチャ認識の有効範囲は狭く、顔追跡はより長い距離で機能します。
ユーザーインターフェイスの面でこれが重要なのはなぜですか? エンドユーザーは、カメラがどのように彼らを「見ている」かを正確に知りません。 インタラクションゾーンについて知っているため、問題を正確に特定することは不可能であるため、これはアプリケーションを操作するときに迷惑につながる可能性があります。 図の左側の画像 1人のユーザーの手はカメラの視野内にあり、右側の画像の視野外にあります。 この場合、追跡が失われる可能性があります。 アプリケーションが両手または複数の制御モード(たとえば、顔と手の両方を使用)で同時に制御する場合、問題はさらに複雑になります。 また、ラップトップやオールインワンなど、さまざまなサイズのデバイスにアプリケーションを展開する場合は、カメラの視野の変化を考慮してください。後者の場合、インタラクションエリアはラップトップよりも高くなります。 図 図2は、ユーザーがさまざまなデバイスの前にいるさまざまなシナリオを示しています。

図2.カメラの視野とデバイスのサイズ
これらのパラメーターに関する情報は、アプリケーションで効果的なフィードバックメカニズムを構築し、ユーザーにデバイスとカメラの使用方法に関する明確な指示を提供するのに役立ちます。 次に、SDKを使用して、アプリケーションでこれらの視野パラメーターの一部を取得する方法を見てみましょう。
技術的な実装
Intel RealSense SDKは、カメラの視野と範囲データを取得できるAPIを提供します。 QueryColorFieldOfViewおよびQueryDepthFieldOfView APIは、デバイスの種類に関係なく、デバイスインターフェイスで機能します。 これがコードの実装方法です。
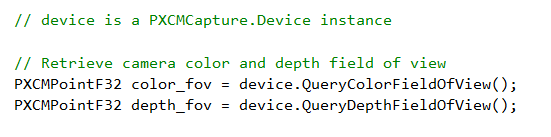
返されるデータ構造はPXCPointF32形式ですが、返される値は角度X(水平表示)およびY(垂直表示)を度単位で示します。 これらは、このモデルのカメラに対してメーカーが設定した値であり、デバイスでプログラム的に構成されたものではありません。
撮影音量の次のパラメーターは範囲です。 QueryDepthSensorRange APIは、ミリメートル単位の範囲値を返します。 この値は、このモデルのデフォルトでメーカーによって設定されており、特定のデバイスでプログラム的に構成されていません。
これらのAPIとそれらをコードに実装する方法を知ることは、ユーザーに効果的なフィードバックシステムを作成するのに役立ちます。 図 図3および4は、体積撮影空間の視覚フィードバックの例を示しています。

図3.カメラ距離のヒント
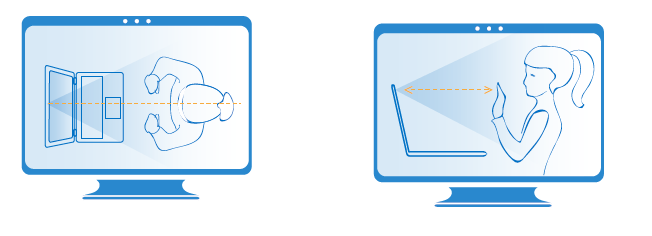
図4.世界の概略図。
シンプルなヒントは、インタラクションゾーンの近くと遠くの境界を示します。 プロンプトがなければ、ユーザーは、システムが自分のアクションへの応答を停止した場合に何をする必要があるかを単に理解しません。 距離データをフィルタリングし、少し遅れてヒントを表示します。 また、エラーアラートの代わりに指示とヒントを使用します。 周囲の世界の概略図は、ユーザーがナビゲートし、深度チャンバー相互作用ゾーンの概念に精通するのに役立ちます。
ヘルプ画面や教育用スクリーンセーバー、ゲームで初めてそのようなカメラを使用できるユーザーは、このような回路図画像を使用することをお勧めします。 最大の効率を得るには、ユーザーを教育するときとヘルプ画面でのみ、周囲の世界の概略図を表示する必要があります。 指示はシンプルで理解しやすいものにする必要があります。コンパイルするときは、アプリケーションの対象読者に焦点を合わせる必要があります。
上記のAPIの代わりに、各SDKで提供されるアラートを使用して、特定のユーザーアクションを記録できます。 たとえば、次の顔認識ソリューションを検討してください。 次の表に、 PXC [M] FaceDataモジュールのアラートを示します。
既にご存じのとおり、SDKは最大4つの顔の検出をサポートしています。 顔識別子を使用すると、アプリケーションのニーズに応じて、各人に関連するアラートを受信できます。 また、追跡が完全に失われる可能性があります(たとえば、人がカメラの視野に入って、追跡するには速すぎる速度で視野を離れた場合)。 このようなシナリオでは、調査ボリュームデータとアラートを使用して、ユーザーに信頼できるフィードバックメカニズムを作成できます。
| アラートタイプ | 説明 |
|---|---|
| ALERT_NEW_FACE_DETECTED | 新しい顔が検出されました。 |
| ALERT_FACE_NOT_DETECTED | シーンには顔がありません。 |
| ALERT_FACE_OUT_OF_FOV | カメラの見えない人。 |
| ALERT_FACE_BACK_TO_FOV | 顔はカメラの視野に戻った。 |
| ALERT_FACE_LOST | 失われた顔の追跡。 |
SDKを使用すると、オーバーレイ、つまりサブジェクトが外部オブジェクトによって遮られている場合も検出できます。 サポートされていないシナリオおよび部分的にサポートされているシナリオの説明については、F200カメラユーザーインターフェイスガイドを参照してください。 追跡しようとしているオーバーレイのタイプに関係なく、次のアラートセットは非常に役立ちます。
| アラートタイプ | 説明 |
|---|---|
| ALERT_FACE_OCCLUDED | 顔が遮られています。 |
| ALERT_FACE_NO_LONGER_OCCLUDED | 顔が遮られなくなりました。 |
| ALERT_FACE_ATTACHED_OBJECT | 顔は、手などのオブジェクトによって遮られています。 |
| ALERT_FACE_OBJECT_NO_LONGER_ATTACHED | 顔がオブジェクトによって遮られなくなりました。 |
それでは、ハンドトラッキングモジュールのアラートに移りましょう。 これらは、SDKの一部としてPXC [M] HandDataモジュールで利用できます。 ご覧のとおり、これらのアラートの一部は、範囲検出を暗黙的に使用しています(顔認識モジュールと手認識モジュールのさまざまなアクション範囲を思い出してください)。
| アラート名 | 説明 |
|---|---|
| ALERT_HAND_OUT_OF_BORDERS | 追跡された手は、ユーザーが指定した2次元境界ボックスまたは3次元境界キューブの外側にあります。 |
| ALERT_HAND_INSIDE_BORDERS | 追跡された手は、ユーザーが定義した2次元バウンディングボックスまたは3次元バウンディングボックス内に戻ります。 |
| ALERT_HAND_TOO_FAR | 追跡された手がカメラから遠すぎます。 |
| ALERT_HAND_TOO_CLOSE | 追跡された手がカメラに近すぎます。 |
| ALERT_HAND_DETECTED | 追跡された手が認識され、そのマークが利用可能になります。 |
| ALERT_HAND_NOTE_DETECTED | 以前に発見されたハンドは、見えないかブロックされているため失われます。 |
| そして、他の多くの... | ドキュメントを参照してください。 |
これで、SDKが提供する機能がわかり、アプリケーションコードに簡単に適用できます。 次のコードスニペットに例を示します。

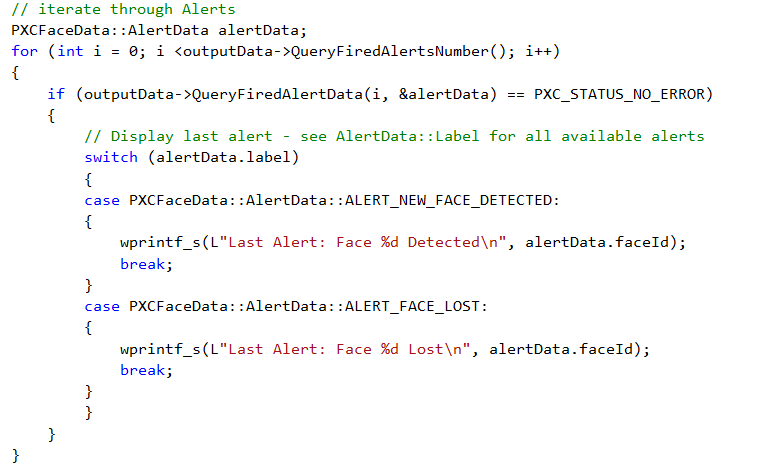
wprintf_s命令を視覚フィードバック実装ロジックに置き換えます。 以下に示すように、すべてのアラートをオンにすることはできませんが、一部のアラートのみをオンにすることができます。

図 図5および6は、アラートを使用した効果的な視覚フィードバックの例を示しています。

図5.カメラの視野内のユーザーの画像

図6.ユーザー画像オーバーレイ
SDKドキュメントのAPIリンク
結果2.ユーザーの疲労の軽減
ユーザーインターフェイスの使用シナリオ:必要な精度に適した入力方法を選択します。
Intel RealSense SDKを使用してアプリケーションを作成するときは、入力モードに留意することが重要です。 さまざまなシナリオに適した入力モードを選択することは、アプリケーションで重要な役割を果たします。 キーボード、マウス、およびタッチスクリーンの入力は非常に正確ですが、ジェスチャの入力は低精度です。 たとえば、データを大量に処理する必要があるアプリケーションを使用するには、ジェスチャーよりもキーボードとマウスの入力を使用することをお勧めします。 マウスではなく指でExcelの特定のセルを選択しようとするものを想像してみてください(図7を参照)。 このようなアクションは、ユーザーの極端な不快感と疲労以外の何も引き起こしません。 正確なアクションを実行しようとすると、ユーザーは自然に筋肉に負担をかけるため、疲労が増大します。

図7.適切な入力方法の選択
タッチコントロールまたはマウスを使用して、メニューの項目を選択できます。 Intel RealSense SDKがサポートする入力モードは、即時で自然なタッチフリーの対話メカニズムを提供し、魅力的なアプリケーションを作成できるようにします。 複数の反復ジェスチャを必要としない方法でこれらのモードを使用します。 ジェスチャーを使用するには、エラーが望ましくないリスクをもたらさない連続アクションが最適です。
ジェスチャー方向の選択
水平方向または円弧状のジェスチャーを使用することをお勧めします。 選択肢がある場合は、ユーザーの利便性のために、垂直方向の動きではなく水平方向の動きを使用してみてください。 さらに、ユーザーに手を肩の高さより上に上げるように強制するアクションを使用しないでください。 ゴリラの手の効果を覚えていますか?
図8.移動方向の選択
相対運動または絶対運動を選択する
適切な場合はすべて、絶対ではなく相対運動を許可します。 相対的な動きにより、ユーザーは画面上の仮想手の位置を「リセット」して、カメラの前で自分の手のより快適な位置を実現できます。 これは、ポインタをさらに移動する必要がある場合に、マウスを持ち上げてマットの端から中央に移動するのとほぼ同じです。 絶対移動では、画面上のポインターの位置と画面上の手の位置の関係が常に保持されます。 アプリケーションは、特定のコンテキストごとに最適なモーションモデルを使用する必要があります。
速度を理解する
精度の問題の不可欠な部分は速度係数です。 ユーザーがカメラの前で手をあまりに速く動かすと、トラッキングが完全に失われる危険性があります。これにより、手が撮影ボリュームから外れてしまう可能性があります。 アプリケーションで動きの速いジェスチャーを使用すると、ユーザーの疲労が増し、エラーのリスクが高まります。 したがって、速度係数と有効範囲(カメラに近い、20から55 cmの距離で、最大2 m / sの速度で速い動きを検出できます)、および撮影スペース(カメラからの短い距離)の両方に速度係数とその影響を考慮することが非常に重要です片方の手だけが見えます)。
ユーザーアクションの理解とオブジェクトの操作
人間の自然な動きは必ずしも滑らかではありません。人体はしばしば不均一でぎくしゃく動きます。これはカメラによっていくつかの異なる相互作用として解釈されます。 Intel RealSense SDKのアプリケーションを作成するときは、アクションとオブジェクトの関係に留意してください。 たとえば、ジェスチャを使用して手で「撮影」できるオブジェクトがある場合、そのようなオブジェクトのサイズとその位置を考慮する必要があります。画面の端までの距離と、そのようなオブジェクトを「ドラッグ」できる場所、および追跡エラーを検出する方法を考慮する必要があります。
これらの問題を克服するためのいくつかの提案があります。
- 物体は、手の震えや不均一な動きの影響を受けないように十分大きくする必要があります。 ユーザーが誤って必要なオブジェクトを誤って取得できないように、オブジェクト間の距離は十分に大きくする必要があります。
- インタラクション要素を画面の端に近づけすぎないでください。この場合、ユーザーの手が視界から外れて追跡できなくなるリスクが高くなり、ユーザーが避けられない正しい刺激を引き起こす可能性があります。
- インターフェイスでオブジェクトのドラッグが重要な場合は、ドラッグされたオブジェクトを正確にドラッグできる場所と解放できる場所が明確になります。
- ユーザーがオブジェクトを移動したときに追跡の失敗が発生した場合、移動したオブジェクトは元の場所に戻り、追跡の失敗をユーザーに通知する必要があります。
技術的な実装:速度と精度
アプリケーションが手の関節のデータを必要とせず、より頻繁に手の速い動きが使用される場合、Blobモジュールを使用するのは理にかなっています。 次の表に、考えられるさまざまなシナリオと、それぞれのシナリオでの推定精度を示します。 関節データを使用して腕全体を追跡する場合、動作は遅くなりますが、この制限はチップ追跡またはBlobモードを使用して回避できます。 さらに、Blobモードのおかげで、アプリケーションが子供向けの場合、多くの利点が得られます。
| 追跡モード | 手だけ? | インプリント | 計算負荷 | 制限事項 |
|---|---|---|---|---|
| フルハンド | はい | セグメント化された画像、手足ポイント、腕の側面、アラート、関節データ、指データ、開いたまたは圧迫された手のひらデータ、ジェスチャー | 最高のマルチスレッド | 2本の手、範囲60 cm、低い手の速度 |
| 四肢 | はい | セグメント化された画像、手足ポイント、腕の側面、アラート | ミディアムシングルストリーム | 2本の手、範囲60 cm、平均手の速度 |
| ブロブ | いや | セグメント化された画像、肢点、等高線 | 低シングルストリーム | 4つのオブジェクト、範囲100 cm、高速 |
アプリケーションがより完全な制御を必要とし、移動速度を制御する必要がある場合、 PXCMHandConfiguration.EnableJointSpeedを使用して手の関節のレベルで速度データを取得できます。 これにより、手の現在および以前の位置に基づいて計算された速度の絶対値、または一定期間の平均速度のいずれかを取得できます。 それでも、このアプローチではCPUとRAMの負荷が大幅に増加するため、この方法は絶対に必要な場合にのみ適用する必要があります。
ジャークせずにユーザーをスムーズに移動させることはできないため、Smootherプログラム(PXC [M] Smoother)もSDKに含まれており、カメラの前で手を動かすときの動きを滑らかにします。 このプログラムは、さまざまな線形および正方形アルゴリズムを使用します。 それらを試して、最適なものを選択できます。 図 下の図9は、このプログラムによって不均一な手の動きが大幅に滑らかになることを示しています。

図9.アンチエイリアスを使用した場合と使用しない場合のデータ
腕の動きが速すぎることを検出する別の方法は、 PXCMHandData.TrackingStatusTypeプロパティでTRACKINGSTATUS_HIGH_SPEEDを列挙することです 。 顔が検出されると、急速な動きにより追跡が失われる可能性があります。 PXCMFaceData.AlertData.AlertType - ALERT_FACE_LOSTを使用して、失われた追跡を判断します。 手のジェスチャーを使用して、タッチレスコントローラーを使用してオペレーティングシステムを制御する場合は、 PXC [M] TouchlessControllerのSetPointerSensitivityおよびSetScrollSensitivity関数を使用して、ポインターの感度とスクロールを調整します。
境界ボックス
スムーズなアクションとオブジェクトとの相互作用を実現する効果的なメカニズムは、制限的なフレームワークの使用です。 これらは、ユーザーが対話するオブジェクトのソースと宛先の明確な視覚的表示をユーザーに提供します。
SDKの顔と手の追跡モジュールは、深度マップ上の追跡された手の位置とサイズ(2次元バウンディングボックス)を返すPXCMHandData.IHand.QueryBoundingBoxImage APIをサポートしています。 PXCMFaceData.DetectionData.QueryBoundingRect APIは、検出された顔の境界ボックスを返します。 PXCMHandData.AlertType - ALERT_HAND_OUT_OF_BORDERSを使用して、境界ボックスを超えて伸びている手を検出することもできます。
SDKドキュメントのAPIリンク
R200カメラのユーザーインターフェイスの作成とAPIの使用に関する推奨事項
R200カメラはタブレットに組み込まれ、取り外し可能なデバイスの形で提供されます。 ユーザーの周りのスペースをキャプチャするように設計されています。 R200カメラを使用するための可能なシナリオの中で、拡張現実や人体全体を撮影するなどのソリューションに注意する必要があります。 周囲の世界がこのカメラの視野に入るため、ユーザーインターフェイスの性質と一連の設計上の問題は、上記のF200カメラの問題とは異なります。 このセクションでは、Scene Perceptionモジュール(拡張現実アプリケーションの開発者が使用する)と3Dスキャンモジュールに関連する既知のユーザーインターフェイスの問題について説明します。
結果1.タブレットの撮影量とインタラクションエリアを理解する
UIの使用例
図に見られるように 図10に示すように、R200カメラの視野角は、垂直および水平、ならびにその範囲と同様に、F200カメラの同様の特性とは大きく異なります。 R200カメラは、アクティブモード(ユーザーが動き回るとき、シーンを撮影するとき)とパッシブモード(ユーザーが静止画像で作業するとき)の2つの異なるモードで使用できます。 オブジェクトまたはシーンを撮影する場合、ユーザーがアクティブモードで撮影している間、オブジェクトがカメラの視野内にあることを確認してください。 また、このカメラの範囲(使用場所に応じて:屋内または屋外)は、F200の範囲とは異なることに注意してください。 実行時にこれらのデータポイントを取得して、ユーザーに視覚的なフィードバックを提供する方法は?
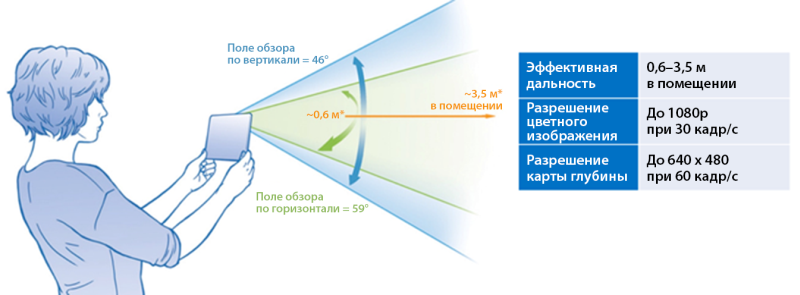
図10. R200カメラの体積撮影スペース
技術的な実装
上記のF200カメラセクションで、 QueryColorFieldOfView()およびQueryDepthFieldOfView()APIについて既に説明しました。 これらの機能はデバイスに依存せず、R200カメラでのサラウンド撮影に使用できます。 それでも、R200カメラの範囲を検出するには、このデバイス専用に設計された専用のAPIを使用する必要があります。 R200カメラのこのようなデータを取得するには、 PXCCaptureインターフェイスの一部として利用可能なQueryDSMinMaxZ APIを使用する必要があります。 カメラの最小および最大範囲をミリメートル単位で返します。
SDKドキュメントのAPIリンク
結果2.ユーザーアクションとシーンとの相互作用を理解する
ユーザーインターフェイスの使用シナリオ:シーンの機能とカメラの機能に基づいたスケジューリング
アクティブモードでカメラを操作するときは、カメラの制限を覚えておいてください。 反射面と黒面のある非常に明るい領域を含むシーンを撮影する場合、深度データの精度は低下します。 追跡が失敗する場合の情報は、アプリケーションで効果的なフィードバックメカニズムを構築し、必要なアクションをユーザーに優しく思い出させ、ジョブをエラーで終了させないようにするのに役立ちます。
技術的な実装
Scene Perceptionと3D Scanningモジュールには異なる要件があるため、異なるメカニズムを使用して最小要件を検出します。
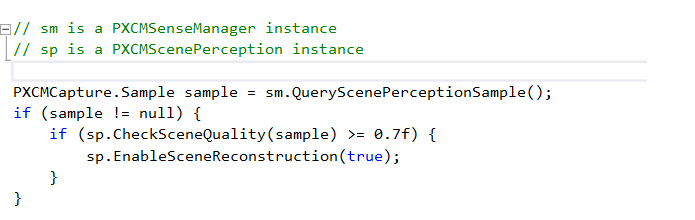
シーンの知覚 。 常にシーンが追跡に適しているかどうかを判断するには、 PXCScenePerceptionモジュールのCheckSceneQuality APIを使用します。 APIは0〜1の値を返します。返される値が大きいほど、シーンを追跡しやすくなります。 これがコードの実装方法です。
シーンの品質が満足のいくものと見なされて追跡が開始されたら、 PXCScenePerceptionモジュールのTrackingAccuracy APIを使用して追跡ステータスを動的に確認する必要があります。 このAPIは追跡精度を提供します。
| 名 | 説明 |
|---|---|
| 高い | 高い追跡精度 |
| 低い | 低い追跡精度 |
| MED | 平均追跡精度 |
| 失敗しました | 追跡エラー |
シーンデータの品質を最大化するために、ボクセルの解像度を調整することもできます(ボクセルは3次元画像の解像度の単位です)。 カメラが追跡しているものに応じて(部屋、テーブルの表面、または近くにあるオブジェクトのサイズの間隔)、次の表に従ってボクセルの解像度を調整して最適な結果を得ることができます。
| 名 | 説明 |
|---|---|
| LOW_RESOLUTION | 低解像度のボクセル。 この許可を使用して、部屋サイズのスペース(4/256 m)を追跡します。 |
| MED_RESOLUTION | ボクセルの平均解像度。 この解像度を使用して、テーブルの表面(2/256 m)を追跡します。 |
| HIGH_RESOLUTION | 高解像度のボクセル。 この権限を使用して、小さなオブジェクト(1/256 m)を追跡します。 |
3Dスキャン3Dスキャンアルゴリズムは、次の表に示すアラートを提供します。 PXC3DScan :: AlertEventを使用して、このデータを取得します。
| 名 | 説明 |
|---|---|
| ALERT_IN_RANGE | 被写体は適切な距離にあります。 |
| ALERT_TOO_CLOSE | 被写体がカメラに近すぎる。 オブジェクトをカメラから遠ざけるようにユーザーを招待します。 |
| ALERT_TOO_FAR | 被写体がカメラから遠すぎます。 オブジェクトをカメラに移動するようにユーザーを招待します。 |
| ALERT_TRACKING | 件名は正しく追跡されます。 |
| ALERT_LOST_TRACKING | キャプチャされた被写体の追跡は失われます。 |
アプリケーションにカメラトラッキングと使用するモジュールの制限に関するデータが含まれている場合、このデータを使用して視覚的なフィードバックを提供し、カメラによってアクションがどのように解釈されたかをユーザーに明確に示すことができます。 トラッキングが失われた場合、カメラをより正確に操作する方法を示すことができます。 視覚的なフィードバックの例は、ここでは例としてのみ示されています。それらは、アプリケーションの要件とユーザーインターフェイスデバイスに合わせて調整する必要があります。
起動時のサンプルトレーニングプログラム。
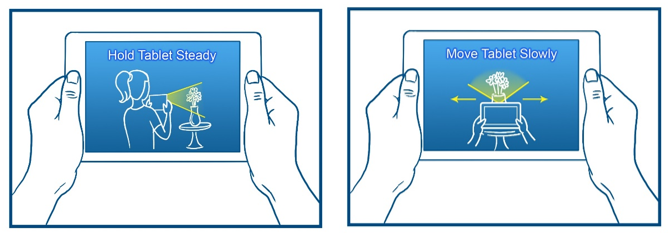
図11.トレーニング
ショット領域または被写体をプレビューします。
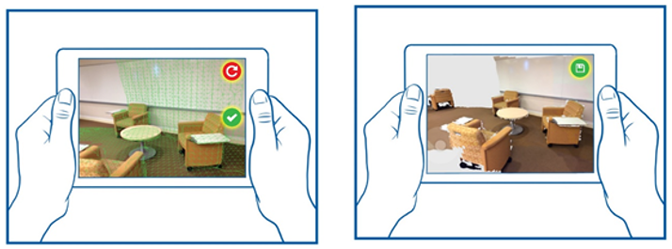
図12.プレビュー
ユーザー向けのヒント。
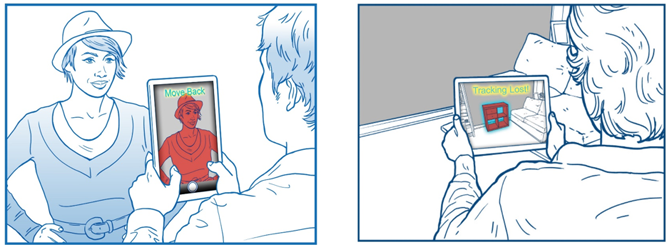
図13.ユーザー向けのヒント
ユーザーがデバイスを手に持ったときの疲労の軽減
ほとんどのアプリケーションは、アクティブと非アクティブの両方のカメラモードでデバイスを使用します。 (これらの2つのモードは次のように異なります:ユーザーがカメラを介してシーンを表示したり、撮影したりするためにタブレットを保持している場合、カメラはアクティブモードで動作します。ユーザーがタブレットを置いて画面上のコンテンツを操作する場合、カメラは非アクティブモードで動作し、カメラはオフです)。 ユーザーの疲労を軽減するには、指定された各モードでユーザーがデバイスを保持して使用する方法を理解し、それに応じて対話ゾーンを選択する必要があります。 カメラをアクティブモードで使用する場合、ユーザーは、図5に示すように、デバイスの重量を維持するため、疲れが早くなります。 14。

図14.アクティブモードと非アクティブモードでのデバイスの使用
アクションに適したモードを選択する
使用モードは、ユーザーインターフェイスを介したアプリケーションとの対話の性質も直接決定します。 アクティブモードでは、ユーザーは両手でデバイスを保持します。 したがって、ボタンなどのアプリケーションの視覚要素は、画面上の簡単にアクセスできる場所に配置する必要があります。 調査によると、このような場合は画面の端を使用するのが最適です。 推奨されるタッチゾーンを図に示します。 15.さらに、アクティブモードではタッチの精度が低下するため、アクティブモードは短期間の撮影に最適です。
それどころか、非アクティブモードでは、ユーザーがデバイスを操作する方が便利であり、ユーザーはインターフェイス要素とより正確に対話し、アプリケーションを長時間使用できます。
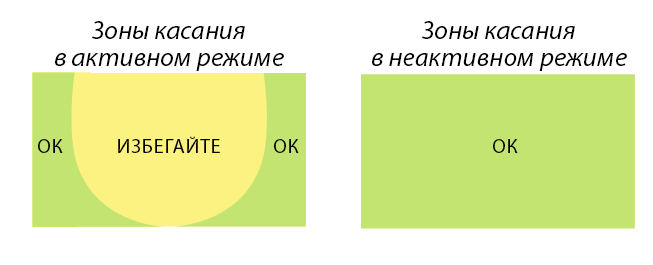
図15.アクティブモードと非アクティブモードのタッチゾーン
SDKドキュメントのAPIリンク
おわりに
インテル®RealSense™テクノロジーを使用してアプリケーションを開発する場合、開発者は、初期段階からのエンドユーザーエクスペリエンスのニーズと特殊性を考慮する必要があります。 この記事で与えられた推奨事項は、ユーザーインターフェイスのいくつかの重要な問題を解決し、SDKを使用して必要なコンポーネントをコードに実装するための基礎として役立ちます。