したがって、このデバイスを作成するには何が必要ですか:
1)Atmega8
2)USBをUSARTに変換するFTDI RL232
3)FTDI RL232のドライバー
4)プログラマー(USBaspを使用)
5)Visual Studio
6)Atmel Studio
7)開発ボード
このセットを使用すると、先に進むことができます。 開始するには、コンポーネントを配置するボードを準備します。
私はこのようにしました:


では、atmega8のUSARTパラメーターを決定しましょう。 私はそれらを持っています:
1)ストップビット-1
2)9600boud
3)パリティビット-いいえ
4Mhzで内部ジェネレーターを使用するため、UBRRレジスタをこの周波数に調整します。 USARTがセットアップされているコードの一部を次に示します。
DDRD|=(1<<1); DDRD&=~(1<<0); UBRRH=0; UBRRL=25; UCSRB|=(1<<RXEN)|(1<<TXEN); UCSRC|=(1<<URSEL)|(1<<UCSZ0)|(1<<UCSZ1);
rw1990ディスクのレコードプロトコルを解析します。 8バイトコードを読み取るコマンドは、ダラスキーと同じです。
rw1990への書き込みは次のように行われます。
1)リセットパルスを送信し、パルスの存在を予期します。
2)コマンド0xD1を送信して、記録を許可します。
3)タイムスロット、論理的な「0」を送信します(図1を参照)。
4)リセットパルスを送信し、パルスの存在を待ちます。
5)書き込みコマンド0xD5を送信します。
6)8バイトのコードを送信します(すべてのビットが反転します)。送信はoneWireプロトコルとは異なります(図1を参照)。
7)リセットパルスを送信し、パルスの存在を待ちます。
8)コマンド0xD1を送信して、書き込みを禁止します。
9)タイムスロット、論理「1」を送信します(図1を参照)。
図1:

記録が行われるコードの一部:
bool onewire_init(){ onewire_low(); _delay_us(480); onewire_high(); _delay_us(2); for(uint8_t i= 60;i;i++){ if(!onewire_level()){ while(!onewire_level()); return true; } _delay_us(1); } return false; } void time_slot(uint8_t data){ onewire_low(); if(data) _delay_us(6); else _delay_us(60); onewire_high(); _delay_ms(10); } void rw1990_write_bit(uint8_t data){ onewire_low(); if (data) _delay_us(6); else _delay_us(60); onewire_high(); _delay_ms(2); } void rw1990_write(uint8_t data){ for(uint8_t i=0;i<8;i++){ rw1990_write_bit(data & 0x01); data>>=1; } } bool rw1990_newcode(uint8_t* buf){ if (onewire_init()){ onewire_send(0xD1); time_slot(0); }else return false; if(onewire_init()){ onewire_send(0xD5); for(uint8_t i=0;i<8;i++){ rw1990_write(~buf[i]); } }else return false; if (onewire_init()){ onewire_send(0xD1); time_slot(1); }else return false; return true; }
そう願っています。 また、マイクロコントローラーと通信するアプリケーションを作成する必要があります。 つまり、コンピューターからマイクロコントローラーに読み取りおよび書き込み要求を送信します。 トピックの下にすべてのソースコードを配置します。 アプリケーションは非常に簡単です。
ただし、ビデオにはすべてが表示されます。
atmega8のソースコード
#define F_CPU 4000000 #include <avr/io.h> #include <avr/interrupt.h> #include <util/delay.h> #define ONEWIRE_PORT PORTB #define ONEWIRE_DDR DDRB #define ONEWIRE_PIN PINB #define ONEWIRE_PIN_NUM 0 void usart_init(); void onewire_high(); void onewire_low(); uint8_t onewire_level(); bool onewire_init(); void onewire_write_bit(uint8_t); void onewire_send(uint8_t); uint8_t onewire_read_bit(); uint8_t onewire_read(); bool onewire_readrom(uint8_t*); void time_slot(uint8_t); void rw1990_write_bit(uint8_t); void rw1990_write(uint8_t); bool rw1990_newcode(uint8_t*); uint8_t usart_read(); uint8_t rom[8]; uint8_t new_rom[8]; uint8_t t=0; ISR (USART_UDRE_vect){ UDR=t; UCSRB &=~(1<<UDRIE); t=0; } int main(void) { usart_init(); asm("sei"); while(1) { uint8_t r=usart_read(); if (r==0x40){ for(uint8_t i=0;i<8;i++){ new_rom[i]=usart_read(); } if(rw1990_newcode(new_rom)){ t=0x45; UCSRB |=(1<<UDRIE); }else{ t=0x46; UCSRB |=(1<<UDRIE); } }else if(r==0x30){ if(onewire_readrom(rom)){ t=0x35; UCSRB |= (1<<UDRIE); for (uint8_t i=0;i<8;i++){ t=rom[i]; UCSRB |= (1<<UDRIE); _delay_ms(1); } }else{ t=0x36; UCSRB |= (1<<UDRIE); } } } } void onewire_high(){ ONEWIRE_PORT &=~ (1<<ONEWIRE_PIN_NUM); ONEWIRE_DDR &=~ (1<<ONEWIRE_PIN_NUM); } void onewire_low(){ ONEWIRE_PORT &=~ (1<<ONEWIRE_PIN_NUM); ONEWIRE_DDR |= (1<<ONEWIRE_PIN_NUM); } uint8_t onewire_level(){ return ONEWIRE_PIN & (1<<ONEWIRE_PIN_NUM); } bool onewire_init(){ onewire_low(); _delay_us(480); onewire_high(); _delay_us(2); for(uint8_t i= 60;i;i++){ if(!onewire_level()){ while(!onewire_level()); return true; } _delay_us(1); } return false; } void onewire_write_bit(uint8_t bit){ onewire_low(); if(bit){ _delay_us(5); onewire_high(); _delay_us(90); }else{ _delay_us(90); onewire_high(); _delay_us(5); } } void onewire_send(uint8_t data){ for(uint8_t i=0;i<8;i++){ onewire_write_bit(data&0x01); data>>= 1; } } void usart_init(){ DDRD|=(1<<1); DDRD&=~(1<<0); UBRRH=0; UBRRL=25; UCSRB|=(1<<RXEN)|(1<<TXEN); UCSRC|=(1<<URSEL)|(1<<UCSZ0)|(1<<UCSZ1); } uint8_t onewire_read_bit(){ onewire_low(); _delay_us(2); onewire_high(); _delay_us(8); uint8_t r = onewire_level(); _delay_us(80); return r; } uint8_t onewire_read(){ uint8_t r = 0; for (uint8_t p = 8; p; p--) { r >>= 1; if (onewire_read_bit()) r |= 0x80; } return r; } void time_slot(uint8_t data){ onewire_low(); if(data) _delay_us(6); else _delay_us(60); onewire_high(); _delay_ms(10); } void rw1990_write_bit(uint8_t data){ onewire_low(); if (data) _delay_us(6); else _delay_us(60); onewire_high(); _delay_ms(2); } void rw1990_write(uint8_t data){ for(uint8_t i=0;i<8;i++){ rw1990_write_bit(data & 0x01); data>>=1; } } bool rw1990_newcode(uint8_t* buf){ if (onewire_init()){ onewire_send(0xD1); time_slot(0); }else return false; if(onewire_init()){ onewire_send(0xD5); for(uint8_t i=0;i<8;i++){ rw1990_write(~buf[i]); } }else return false; if (onewire_init()){ onewire_send(0xD1); time_slot(1); }else return false; return true; } bool onewire_readrom(uint8_t* buf){ if (onewire_init()){ onewire_send(0x33); for(uint8_t i=0;i<8;i++){ buf[i]=onewire_read(); } }else return false; return true; } uint8_t usart_read(){ while(!(UCSRA & (1 << RXC))); return UDR; }
もちろん、すべてをOOPスタイルで実行できますが、どういうわけかその方法を決めました。
いわゆるiButtonターミナルのソース
main.cpp
#include <Windows.h> #include <iostream> #include "ComPort.h" using namespace std; int main(){ char buf_file[10]; wchar_t file[10]; char name[20]; char command[10]; unsigned char rom[8]; cout<<"Enter COM port: "; cin>>buf_file; cout<<"Enter your name: "; cin>>name; mbstowcs(file,buf_file,10); ComPort port((LPCWSTR)file,CBR_9600); cout<<"Welcome "<<name<<"! "<<"If you need help, you can write command \"help\"."<<endl; while(strcmp(command,"exit")){ cout<<name<<"> "; cin>>command; if(!strcmp(command,"write_rom")){ scanf("%x %x %x %x %x %x %x %x",&rom[0],&rom[1],&rom[2],&rom[3],&rom[4],&rom[5],&rom[6],&rom[7]); for(int i=0;i<50;i++){ port.ComWrite(0x40); port.ComWrite((char*)rom,sizeof(rom)); char recv=port.ComRead(); if(recv==0x45){ cout<<"Device> write successfull!"<<endl; break; }else if(recv==0x46){ cout<<"Device> write fail!"<<endl; } Sleep(100); } }else if(!strcmp(command,"read_rom")){ for(int i=0;i<50;i++){ port.ComWrite(0x30); char recv=port.ComRead(); if(recv==0x35){ for(int i=0;i<8;i++){ rom[i]=port.ComRead(); } cout<<"Device> read successfull! "; printf("%02X %02X %02X %02X %02X %02X %02X %0X\n",rom[0],rom[1],rom[2],rom[3],rom[4],rom[5],rom[6],rom[7]); break; }else if(recv==0x36){ cout<<"Device> read fail!"<<endl; } Sleep(100); } } } }
Comport.cpp
#include <Windows.h> #include "ComPort.h" ComPort::ComPort(LPCWSTR str,DWORD baud) { hSerial=CreateFile(str,GENERIC_READ|GENERIC_WRITE,0,0,OPEN_EXISTING,FILE_ATTRIBUTE_NORMAL,NULL); ComPort::baud=baud; SerialParams.DCBlength=sizeof(SerialParams); if(!GetCommState(hSerial,&SerialParams)) MessageBox(NULL,L"Getting state error!",L"Error!",MB_OK|MB_ICONERROR); SerialParams.BaudRate=baud; SerialParams.ByteSize=8; SerialParams.StopBits=ONESTOPBIT; SerialParams.Parity=NOPARITY; if(!SetCommState(hSerial,&SerialParams)) MessageBox(NULL,L"Error setting serial port state!",L"Error!",MB_OK|MB_ICONERROR); } void ComPort::ComWrite(unsigned char buf) { DWORD send; WriteFile(hSerial,&buf,1,&send,NULL); } void ComPort::ComWrite(char* buf,int size) { DWORD send; WriteFile(hSerial,buf,size,&send,NULL); } bool ComPort::ComRead(char* buf,int size) { DWORD recv; char recvchar; ZeroMemory(buf,size); for(int i=0;i<size;i++){ ReadFile(hSerial,&recvchar,1,&recv,0); if(recvchar=='~') break; buf[i]=recvchar; } return true; } char ComPort::ComRead() { DWORD recv; char recvchar; ReadFile(hSerial,&recvchar,1,&recv,0); return recvchar; } ComPort::~ComPort(void) { CloseHandle(hSerial); }
Comport.h
class ComPort { private: HANDLE hSerial; DCB SerialParams; LPCWSTR sPort; int baud; public: ComPort(LPCWSTR,DWORD); void ComWrite(unsigned char); void ComWrite(char*,int); bool ComRead(char*,int); char ComRead(); ~ComPort(void); };
もちろん、コードは最高ではありません。なぜなら、 速く書こうとしたが、それでもうまくいく。
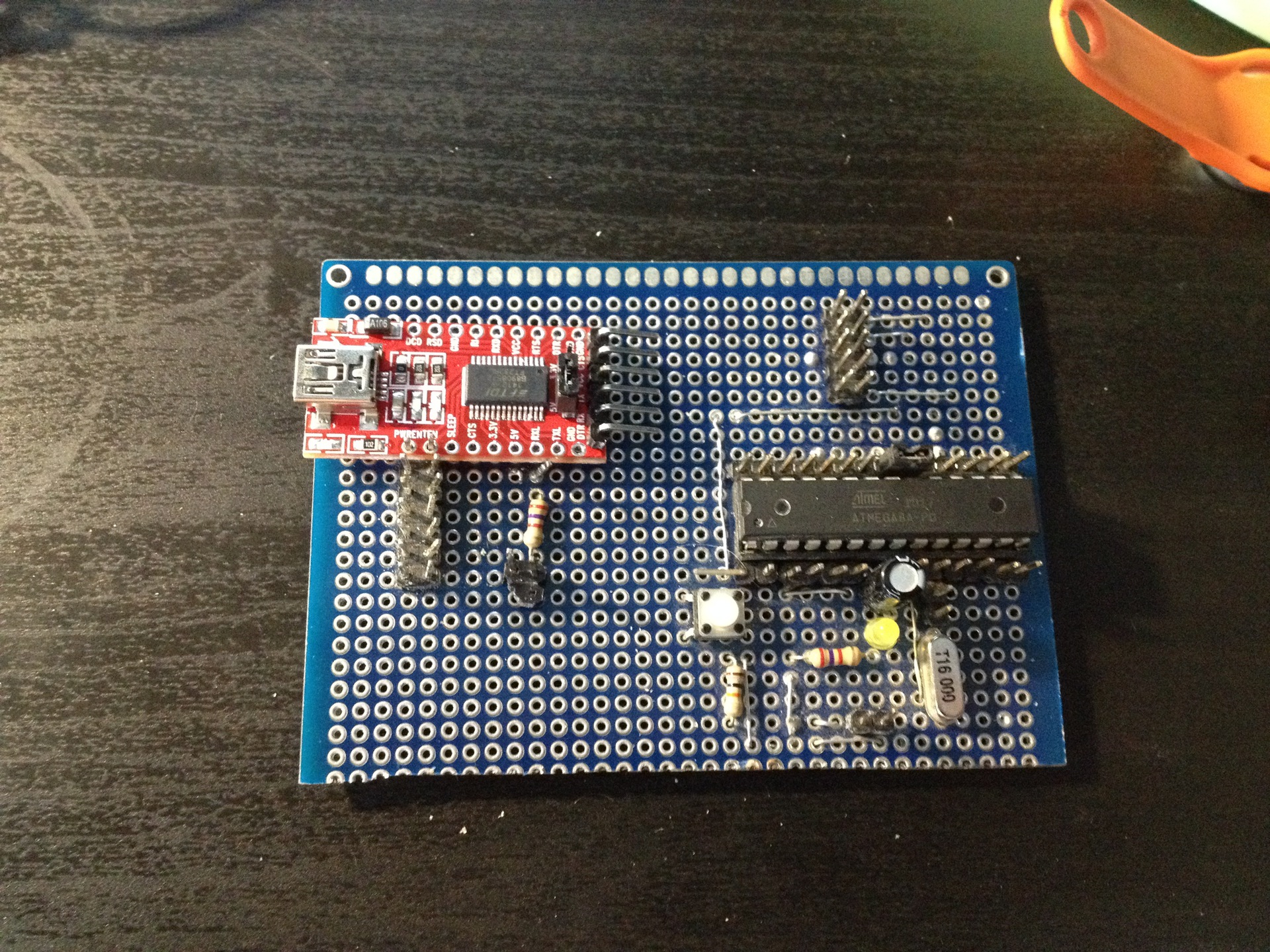
最後に私が得たものは次のとおりです。




そして、ここにビデオがあります: