
中国人は、ドローン用の独創的なアプリケーション開発者を見つけるために、最初は中国、そして今は全世界を「真空」にし始めました。
2014年、DJI(無人機製造分野の中国のGoogle)が開発キット(SDK)を導入した直後に、無人機用ソフトウェアの開発のための最初のコンテストが開催されました。 勝者は100,000元(約900,000ルーブル)を受け取りました。 最初の3つの場所について-カットの下。
2015年、世界中のプログラマー向けの2番目のオリンピアードが始まりました。 その結果は夏の終わりにわかります。
DJI SDKを使用して、非常に人気があり商業的に成功したドローンプログラムをリリースしたプロジェクトがいくつかあります。
 あなたがブドウ園の所有者である場合、または通常
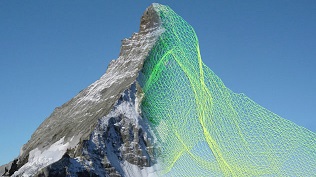
あなたがブドウ園の所有者である場合、または通常または、 マッターホルン山(4478m)の3Dスキャンを作成したいですか?
監視鳥のためのソフトウェアを書きたい人は誰でも、猫の下で歓迎します。 そうでなければ、中国人がそれを行います。
SDK
https://vimeo.com/111597391
ドローンには、ビデオカメラ、ソナー、GPS、レンジファインダー、スマートバッテリー、サスペンション、テレメトリー、トランスミッターなど、あらゆる種類の機能が搭載されています。

さまざまなモデルの機能のサポート
SDKはiOSとAndroidの両方をサポートします

Github

ドローンとアプリケーション開発の潜在的なニッチ

農業と農業、インフラストラクチャの監視、GPSがない場合のセルフナビゲーション、監視とマッピング、映画制作、野生生物の監視、救助、捜索。
初めてのオリンピアード2014
100チームが発表され、7チームが決勝に達しました。

7人のファイナリストから3人の受賞者が選ばれました。
1位:南中国工科大学(SCUT)のBetterWチーム
2位:上海師範大学(SNU)のホワイトチーム
3位:復旦大学のFlatCatチーム
一位

チャンピオンは10万元の現金を受け取りました。 彼らはインターンシップとDJIでの将来の雇用を提供されました。
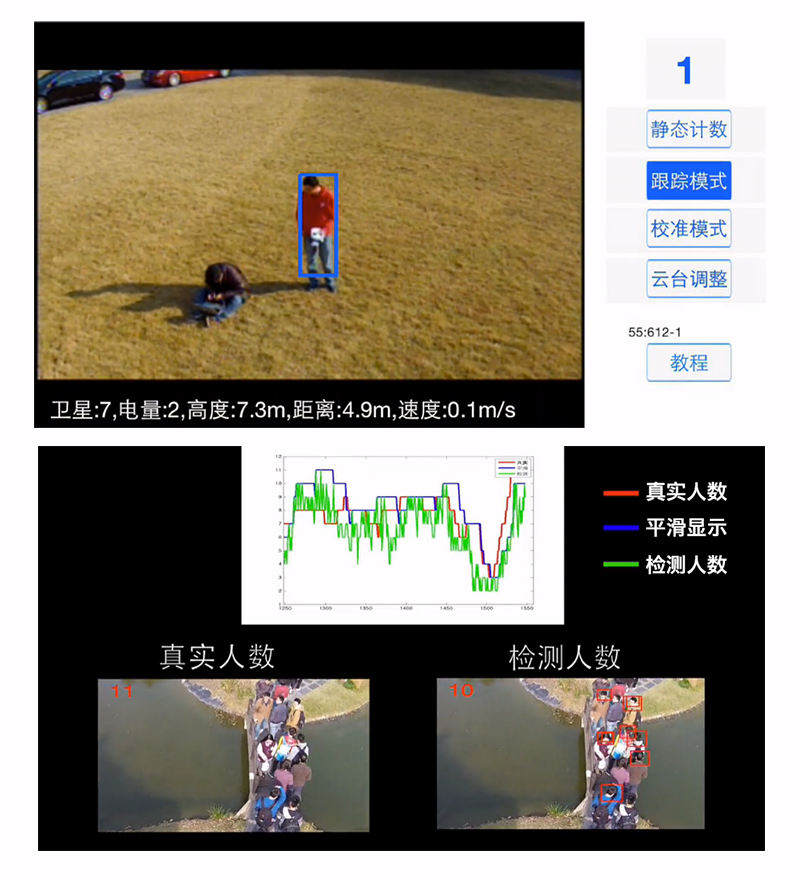
BetterWは、クラッシュによる交通渋滞を支援できるアプリケーションを開発することで、1位になりました。 WeChatメッセンジャーを介して、インシデントの可能性のあるシーンにヒントが到着し、DJI Phantom 2 Vision +ドローンがすぐに状況をキャプチャします。 将来的には、そのようなアプリケーションは、医師や救助者を警察するのに役立ちます。
2位
準優勝チームであるSNUのWhiteは、ハードウェアデバイスの開発と、ユーザーが空撮とビデオ録画を行える「通話モバイルアプリケーション」の開発に審査員に感銘を与えました。 パイロットは飛行制御に集中できるようになり、同時に飛行がはるかに簡単になりました。 チームは実地試験を実施し、受信ゾーンと信号強度を最大化して、飛行デバイスを追跡するメカニズムを作成しました。

3位
集会や大勢の人々の安全を確保するため、3位のFlatCatチームは、ドローンが写真を撮り、写真から特定の地域の人数を計算できるモバイルアプリケーションを作成しました。 データをセンターに送信して、人の流れを監視し、個人の動きを追跡できます。
最初の3つの場所の賞に加えて、傑出した結果に対するCreative App Awardsのノミネートもありました。
「TIANXING ZHE」-スマートフォンの加速度計を使用して飛行を制御するモバイルアプリケーションを作成しました
「FEIJIZHIMENG」-Wi-Fiレンジエクステンダーを使用して、コントロールを2つのモニター(「リモートコントロール」)に分割するプログラムを作成しました。1つは飛行を制御し、もう1つはカメラを制御します。
「XINGKONG ZHE」-空中自撮り用プログラムを導入しました。これは、パイロットの360度画像を作成し、さらに顔を追跡する機能を備えています。
Team For the Dream(FTD)は、障害物回避アルゴリズムを使用してドローンをより安全に飛行させるアプリケーションを導入しました。
(DJIがこれらの「スケッチ」を主要製品に導入する前に半年が経過しました)
第2回オリンピアード2015

「Changing Lives&The World」というスローガンの下で、コンテストは世界中の学生や独立したプログラマーに開かれています。 参加者は、「小型ドローン技術の無限の可能性を世界に示す」のに役立ちます。
チームは、プロジェクトの簡単な説明を登録して送信する必要があります。 DJIは、どのチームが受け入れられ、誰に技術的なアドバイスを与えるべきかを評価します。 審査員団は、UAV業界の専門家、技術者、経験豊富な起業家で構成され、勝者を選びます。
執筆時点では、スケジュールに従って、チームはプロジェクトを8月中旬に審査員に提示するために必死です。
成功するドローンアプリケーションの概要
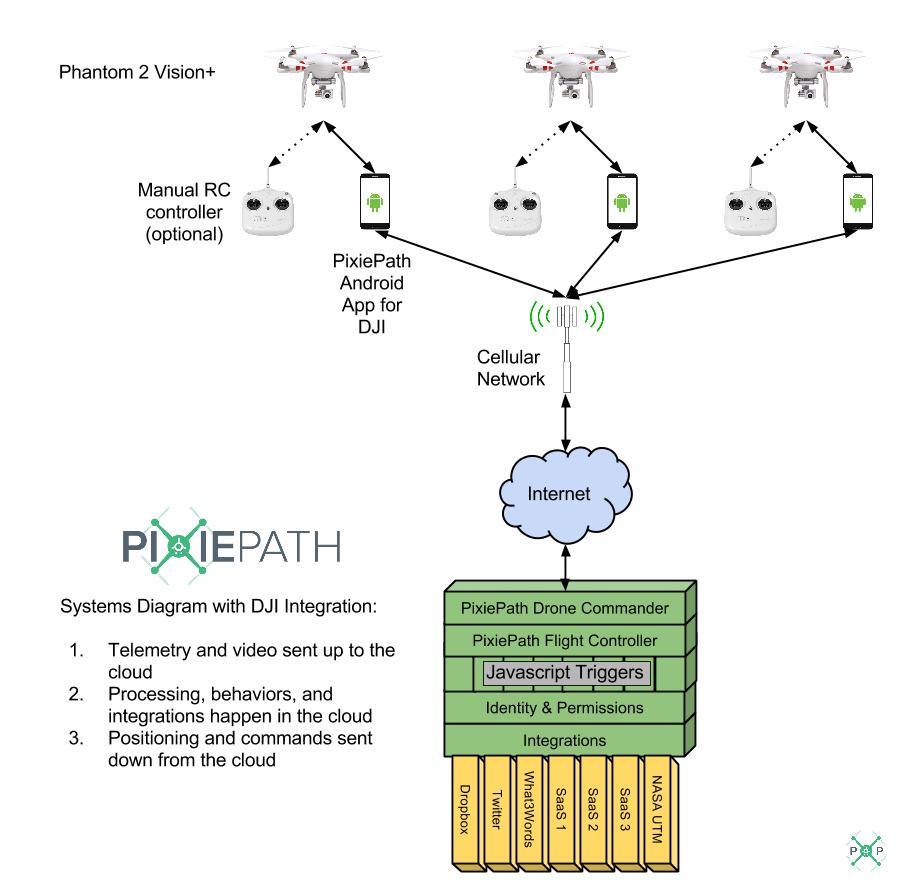
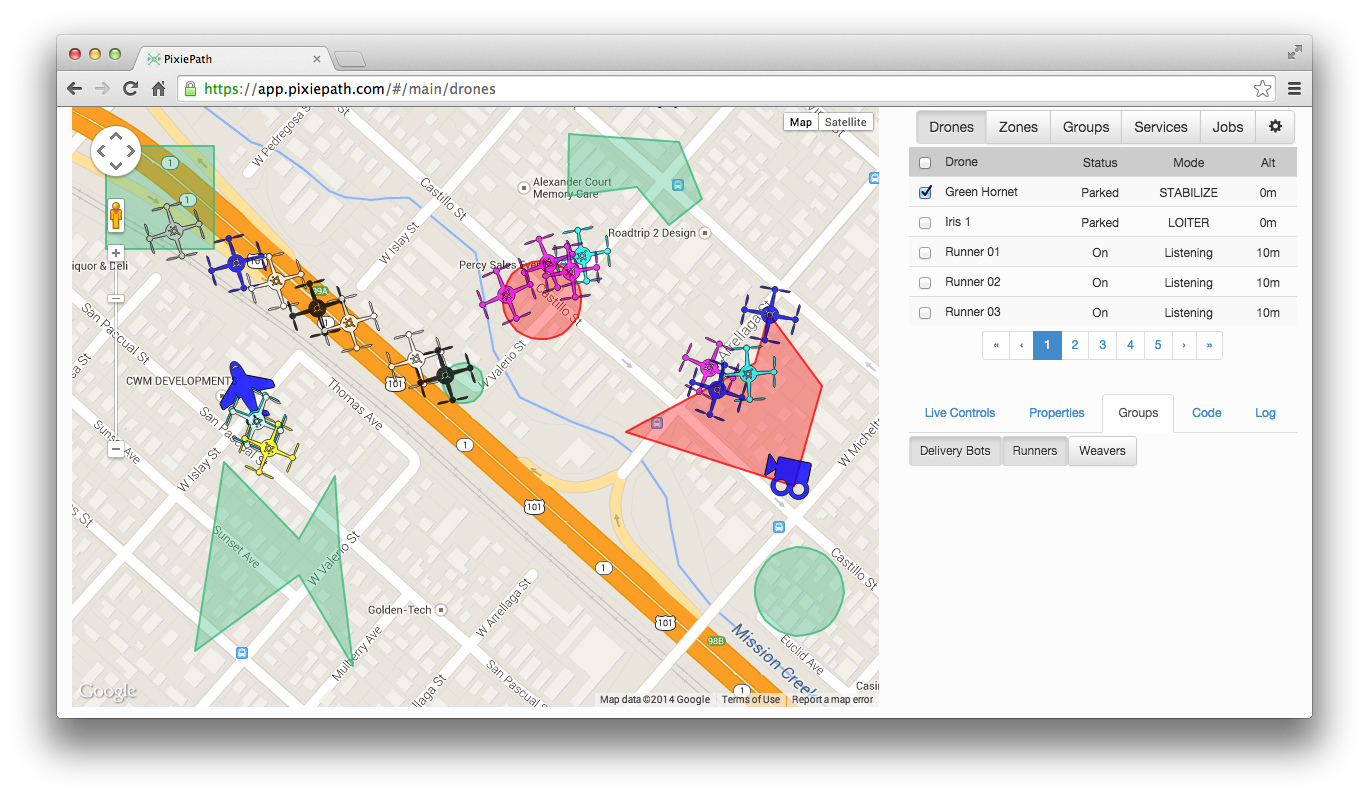
ピクシーパス
アプリケーションを使用すると、ドローンの艦隊全体を管理できます。 可能な応用分野は、迷っている観光客の検索作業です。
プロジェクトリーダーへのインタビュー
ところで、 彼らはベータテスターが必要です。
街の上を同時に飛行する「キャンディラッパー」の群れによって作成されたマップ。
フォーブスの記事
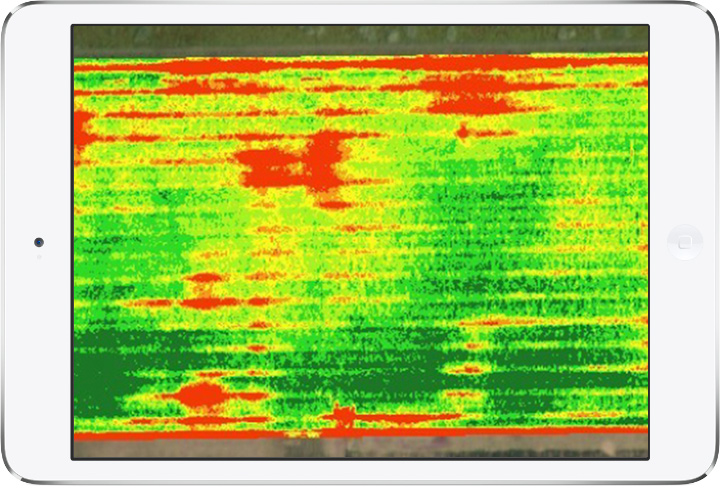
視野
2010年に設立された同社は、農業用地図作成の分野で「ソフトウェア」および「ハードウェア」ソリューションを提供しています。
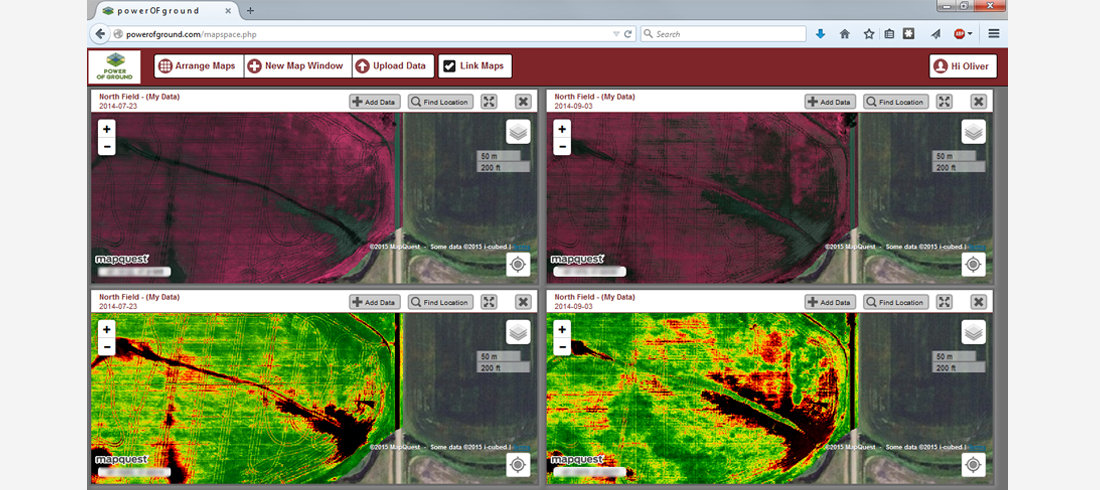
ソフト-植生の状態を監視します

鉄-農業用に特別にシャープ化されたマルチスペクトルおよび従来のカメラ
skyward.io
これらの同志たちは、ドローンで溢れかえり、すでにドローンの軌道と「交通ルール」の開発に取り組んでいる未来を徹底的に見ています。
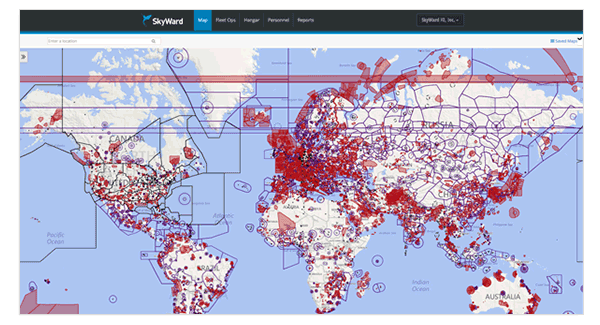
skyward.io/software
天候、交通渋滞など、さまざまな情報へのリアルタイムアクセス。ドローンのみの航空との完全なアナロジー。
BrightSky Labs
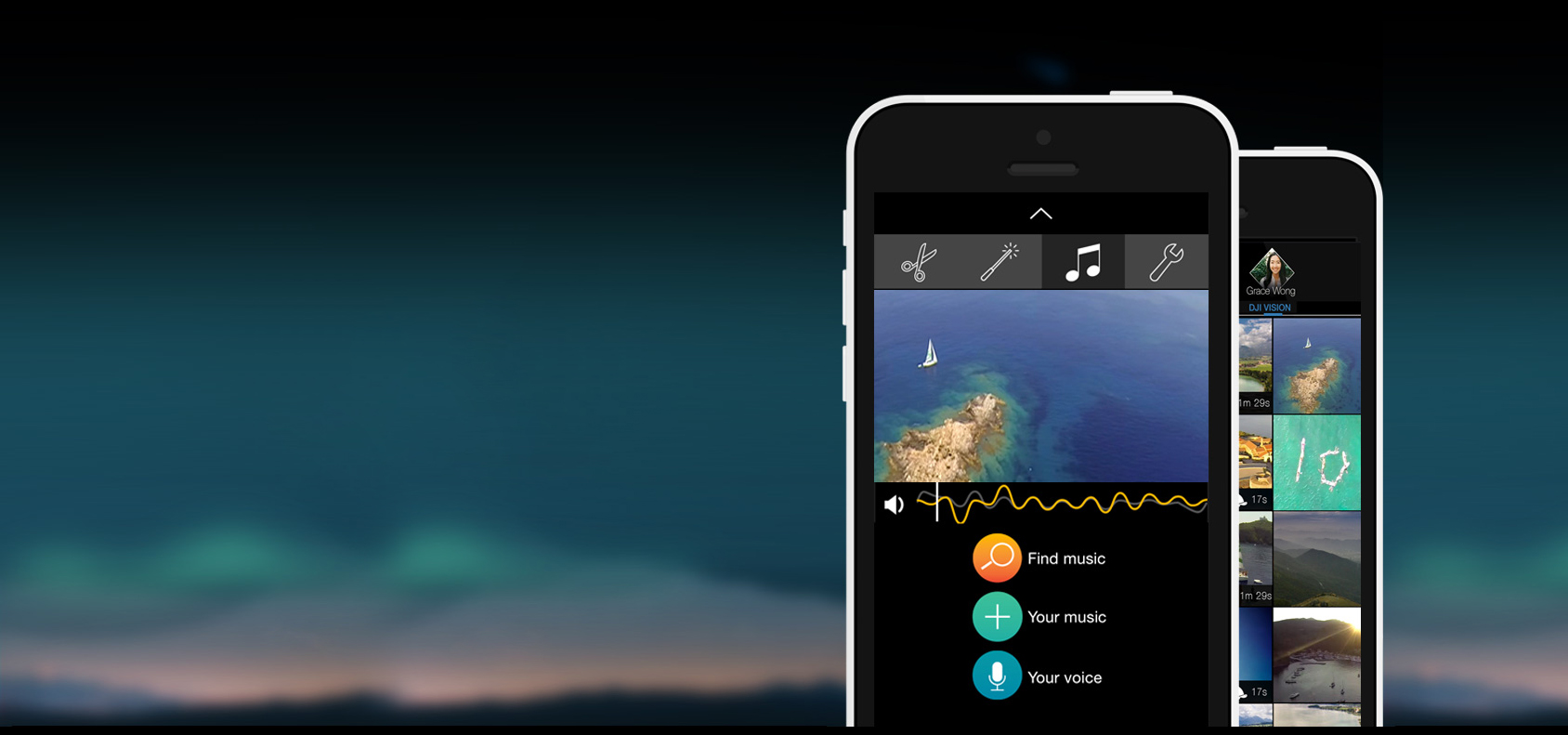
キャンディーラッパーの「Instagram」。 フィルターと音楽を適用することで、ドローンからソーシャルネットワークの写真やビデオをワンクリックで投稿できます。
https://www.youtube.com/watch?v=w-OcfrfYNbQ
すべての機能
主な機能
•自動的にスポットライトが当てられる最高の部分のおかげで、非常に長いビデオからでも、数秒で共有するものを選択できます
•ハリウッドのカラリストによって研究され、お住まいの地域に適した素晴らしいフィルターから選択してください
•独自のアートワークを使用して独自の透かしまたはタイトルカードを追加するか、トップデザイナーから選択します
•お気に入りの音楽または自分の声をビデオに追加する
•シームレスなインポートでDropboxからビデオを編集および共有します
•ビデオを最大500%遅くするか、20%遅くする
•アプリからFacebook、Instagram、Tumblr、YouTube、WhatsApp、Vine、Path、WeChat、メッセージ、またはメールにシームレスに共有
•共有したいソーシャルネットワークの時間的制約に合わせて編集内容を即座に調整
•素晴らしい高解像度ビデオを共有するか、より高速な標準品質ビデオを共有するかを選択します
•編集内容をiPhoneまたはiPadのカメラロールに直接保存する
•iPhoneまたはiPadをGoProのWiFiとDJI Phantom 2 VisionのWiFiにステップバイステップのヒントで接続します
•カメラが見ているもののライブプレビューを見て、必要なビデオを撮影できます
•GoProおよびネイティブDJI Phantom 2 Visionカメラからのライブレコーディングの開始と停止
•DJI Phantom 2 Visionカメラをリアルタイムで制御
•GoProカメラの録画設定を変更する
•便利なショートカットを使用してスローモーションモードで録音する
•スワイプするだけでライブからライブラリに入力を切り替える
•GoProまたはDJI Phantom 2 VisionのmicroSDカードからビデオを再生および編集する
•GoProのmicroSDカード上のファイルを参照および削除する
•DJI Phantom 2 VisionのmicroSDカードのファイルを閲覧する
•友人を招待してGoProからビデオを取得し、自分の好きな部分を共有する
•iPhoneまたはiPadと同じ簡単で強力な機能をお楽しみください
•iPhoneまたはiPadで撮影したタイムラプスビデオとスローモーションビデオを編集する
•iPhone 6およびiPhone 6 Plusで壮観に見える-iPhone 5s、5c、5、4sおよびiPadでも素晴らしい
•すべてのGoPro HERO 4、3+、および3台のカメラに最適
•DJI Phantom 2 VisionおよびVision Plusのネイティブカメラに最適
•自動的にスポットライトが当てられる最高の部分のおかげで、非常に長いビデオからでも、数秒で共有するものを選択できます
•ハリウッドのカラリストによって研究され、お住まいの地域に適した素晴らしいフィルターから選択してください
•独自のアートワークを使用して独自の透かしまたはタイトルカードを追加するか、トップデザイナーから選択します
•お気に入りの音楽または自分の声をビデオに追加する
•シームレスなインポートでDropboxからビデオを編集および共有します
•ビデオを最大500%遅くするか、20%遅くする
•アプリからFacebook、Instagram、Tumblr、YouTube、WhatsApp、Vine、Path、WeChat、メッセージ、またはメールにシームレスに共有
•共有したいソーシャルネットワークの時間的制約に合わせて編集内容を即座に調整
•素晴らしい高解像度ビデオを共有するか、より高速な標準品質ビデオを共有するかを選択します
•編集内容をiPhoneまたはiPadのカメラロールに直接保存する
•iPhoneまたはiPadをGoProのWiFiとDJI Phantom 2 VisionのWiFiにステップバイステップのヒントで接続します
•カメラが見ているもののライブプレビューを見て、必要なビデオを撮影できます
•GoProおよびネイティブDJI Phantom 2 Visionカメラからのライブレコーディングの開始と停止
•DJI Phantom 2 Visionカメラをリアルタイムで制御
•GoProカメラの録画設定を変更する
•便利なショートカットを使用してスローモーションモードで録音する
•スワイプするだけでライブからライブラリに入力を切り替える
•GoProまたはDJI Phantom 2 VisionのmicroSDカードからビデオを再生および編集する
•GoProのmicroSDカード上のファイルを参照および削除する
•DJI Phantom 2 VisionのmicroSDカードのファイルを閲覧する
•友人を招待してGoProからビデオを取得し、自分の好きな部分を共有する
•iPhoneまたはiPadと同じ簡単で強力な機能をお楽しみください
•iPhoneまたはiPadで撮影したタイムラプスビデオとスローモーションビデオを編集する
•iPhone 6およびiPhone 6 Plusで壮観に見える-iPhone 5s、5c、5、4sおよびiPadでも素晴らしい
•すべてのGoPro HERO 4、3+、および3台のカメラに最適
•DJI Phantom 2 VisionおよびVision Plusのネイティブカメラに最適
Phantomの自動操縦

ドローン+スマートフォン=自動操縦と「フォローミー」を含む多くの飛行モード。
違法駐車
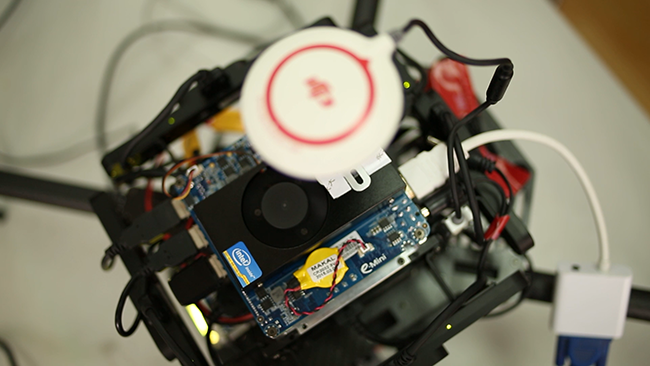
6月2日、DJIとIntelは力を合わせて、駐車制御のための「都市ソリューション」を作成しました。
Intelのプロセッサを使用すると、ドローンは車の位置と向きを判断し、車がどの程度合法的に駐車されているかを理解できます。
ドローンデプロイ

ブドウ園の所有者のためのプロジェクト。 1クリックでカードを作成できます。 自動モードでのマッピング。
鉱業向けのマッピング

こちらをクリックしてください
2cm /ピクセルの解像度で構築用のマップを作成します
」

デモ
農業-ドローンは、害虫、雑草、病気など、肉眼では感知できないほど早い段階で発見するのに役立ちます。
Pix4d
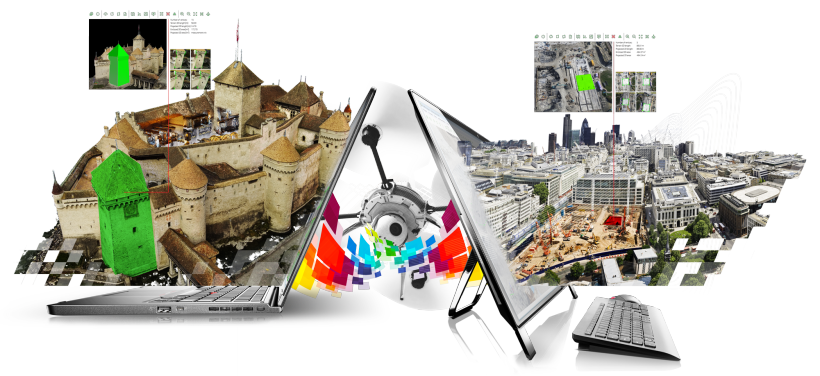
ドローンで撮影した写真に基づいて3Dモデルを作成するサービス。
トレーニングウェビナーとプロジェクトレポートの記録を含むビデオチャネル
3Dモデルを作成するためのメカニズム
各写真に関する情報は、EXIFファイルに記録されます。撮影された高さ、カメラが回転された角度、経度と緯度のデータです。 このプログラムでは、マシンビジョンと写真測量技術を使用して、多くの写真の共通点を見つけます。 ジオデータとカメラの回転角度が与えられると、他の写真の色と一致する各ピクセルが検索されます。
一致する写真
すべての試合が重要なポイントになります。 キーポイントが3枚以上の写真で見つかった場合、プログラムはこのポイントを空間に構築します。 キーポイントが多いほど、空間内のポイントの座標を簡単に決定できます。 ここから主なルールに従います-写真間の大きな交差点を維持します。 プログラム開発者は、60〜80%の共通部分を推奨しています。
各ポイントの空間座標は、三角測量の方法によって計算されます。視線または光線が各測量ポイントから選択したポイントに自動的に描かれ、それらの交点が目的の値を与えます。
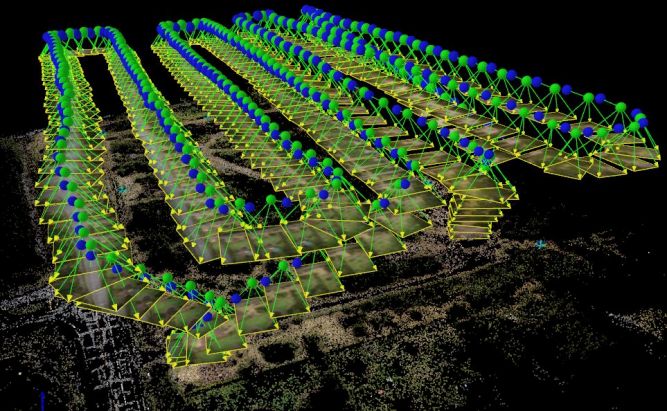
写真測量で使用されるアルゴリズムは、最小二乗法による非線形方程式の解に基づいて、通常、 Levenberg-Marquardtアルゴリズム (またはバンドル法)を使用して解決される、エラーセットの二乗和を最小化することを目的としています。
すべての3Dポイントの全体をポイントクラウドと呼びます。 写真処理中に、三角形(ポリゴン、メッシュ)で構成されるサーフェスを生成するために使用される拡張ポイントクラウドが作成されます。 最後のステップは、解像度(ピクセルサイズ)と、写真のどのピクセルがどのメッシュに対応するかを計算することです。 これを行うには、3Dモデルを2D平面に展開し、ポイントの3D位置を元の写真にマッピングして色を設定します。
ドローンを測定デバイスに変える方法
一致する写真
すべての試合が重要なポイントになります。 キーポイントが3枚以上の写真で見つかった場合、プログラムはこのポイントを空間に構築します。 キーポイントが多いほど、空間内のポイントの座標を簡単に決定できます。 ここから主なルールに従います-写真間の大きな交差点を維持します。 プログラム開発者は、60〜80%の共通部分を推奨しています。
各ポイントの空間座標は、三角測量の方法によって計算されます。視線または光線が各測量ポイントから選択したポイントに自動的に描かれ、それらの交点が目的の値を与えます。
写真測量で使用されるアルゴリズムは、最小二乗法による非線形方程式の解に基づいて、通常、 Levenberg-Marquardtアルゴリズム (またはバンドル法)を使用して解決される、エラーセットの二乗和を最小化することを目的としています。
すべての3Dポイントの全体をポイントクラウドと呼びます。 写真処理中に、三角形(ポリゴン、メッシュ)で構成されるサーフェスを生成するために使用される拡張ポイントクラウドが作成されます。 最後のステップは、解像度(ピクセルサイズ)と、写真のどのピクセルがどのメッシュに対応するかを計算することです。 これを行うには、3Dモデルを2D平面に展開し、ポイントの3D位置を元の写真にマッピングして色を設定します。
ドローンを測定デバイスに変える方法
リオ
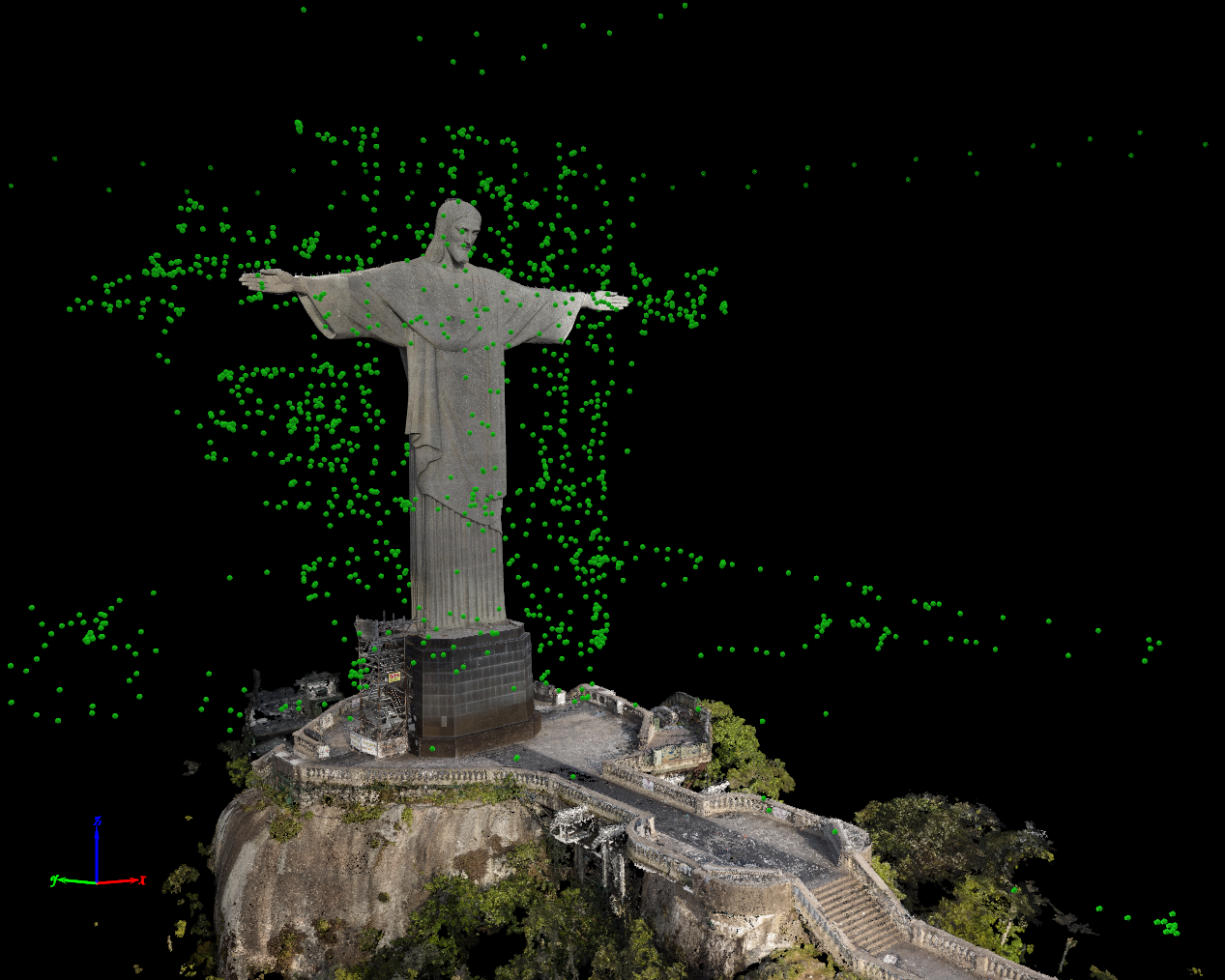
19分間の10分間の出撃で3584枚の写真が撮影され、そのうち2090枚がモデルの作成に使用されました。 強風、気まぐれな気象条件、不安定な光、訪れる時間が限られているため、撮影プロセスは約8時間かかり、7日間延長されました。 82のコントロールポイントと適切なスケールの長さ測定値を使用して、モデルのさまざまな部分を手動で組み合わせました。 最終バージョンには、16384x16384ピクセルの解像度で250万メッシュと134.4百万ピクセルが含まれています。

ここで 3Dモデルを回転できます 。
プロジェクトがどのように作成されたかをビデオで見る
川と洪水

1時間の撮影と14時間の処理で、総面積360ヘクタール、長さ15 kmの浸水領域の3Dモデルを取得できました。 モデルの精度は4.12 cm /ピクセルで、1992年の写真を組み合わせました。 このプロジェクトには2つの目標がありました:洪水時の川の最大水増量を確立し、長期的にダイナミクスを監視するとともに、倒木のある地域を特定し、海岸の開通性に影響を与えたり、ダムを形成した地域を見つけたりすることです。
山

グライダーでの11飛行、合計5時間40分の飛行時間で、pix4dチームは2188枚の写真を撮り、スイスで最も有名な山の3Dモデルを作成しました。 総面積は28平方メートルでした。 km、経路長は263.6 km、最大高さは4707 mです。モデルには、解像度20 cm /ピクセルの3億点が含まれています。
城

このプロジェクトの目的は、スイスのシヨン城の非常に正確なモデルを作成することでした-中庭と18室を含む複雑な建築構造です。 城の外部および内部の写真を取得するために、Phantom 2 Vision、GoPro Hero 3 +、Canon 6D、Sony alpha 7rが使用されました。

半日で、プロジェクトチームは6,200枚の写真を撮りました。 ファサードの正確な再構築のために、いくつかのタイプの撮影が使用されました:垂直下向き、カメラの傾きと地上写真での撮影-そして19個の別々の写真セットがpix4dプログラムで処理され、結合され、結果として5以上の解像度を持つ9500万点からなる高さマップに変換されましたmmから20 cm。
ここで 3Dモデルを回転できます 。
プロジェクト報告書(PDF)
プロジェクトビデオレポート
(モスクワ)開発者向け
開発者はすでに大量に必要です。
ドローンソフトウェアのテストを待つことができない場合、CopterTimeは、DJI Matrice 100超高機能プラットフォームをテスト(事前のワークショップで)およびこれらのモデル(SDKでサポートされている機能の一覧表)に提供する準備ができています。

Phantom 2 Vision + | 
インスパイア1 | 
Phantom 3 Professional | 
Phantom 3 Advanced | |
| 480p | 720p | 720p | 720p |

| 1080P
30 fps 14 MP写真 | 4K、30 fps
12 MP写真 露出モード:プログラム露出、スポット測光、シャッター優先、手動露出 | 4K、30 fps
12 MP写真 露出モード:プログラム露出、スポット測光、シャッター優先、手動露出 | 1080P、60 fps
12 MP写真 露出モード:プログラム露出、スポット測光、シャッター優先、手動露出 |

| √ | 着陸装置の制御 | √ | √ |

| √ | 完全な360˚ジンバル制御
ヨー軸を自動的に中心位置に戻すことができます | √ | √ |

| √ | √ | √ | √ |

| 範囲拡張とデータリンクから情報を収集します
伝送距離: FCC:800m CE:400m | - | - | - |

| - | チャンネル選択とライブストリーム設定をサポート
伝送距離:2000m | チャンネル選択とライブストリーム設定をサポート
伝送距離:2000m | チャンネル選択とライブストリーム設定をサポート
伝送距離:2000m |

| - | マスター/スレーブモード
組み込みGPS | √ | √ |

| ウェイポイント
ジョイスティック姿勢制御 | 興味のあるポイント、フォローミー、ウェイポイント、IOC | 興味のあるポイント、フォローミー、ウェイポイント、IOC | 興味のあるポイント、フォローミー、ウェイポイント、IOC |