対象物までの距離を決定するためのエコーロケーションの原理は、使用するモーションセンサーの基礎です。
この記事が初心者にとってだけでなく、さまざまなソースからのデータシート、TTX、仕様、イラスト、ライブラリなど、超音波距離計に関する情報を1か所で収集しようとしたため、より上級ユーザーの時間を節約できることを願っています。
前回の投稿では、いくつかのシールドをほぼ自動的に収集し、一方と他方でMKを再プログラムしました。 新しい曲をプレーヤーにアップロードすることほど難しくありませんでした。 したがって、原則として、このコンストラクターでどのようにプレイできるかを学び、既製のシールドとスケッチを変更することで、この方法でプレイし続けることができます。 しかし、私は自分の何かを集めたいです。
それでは、回路とプログラミングの目を見ることを恐れることなく、ほとんど真剣に、そして完成した回路に独立して追加のセンサーを追加してみましょう。 テキストの全期間にわたって、はんだごてを約10秒間拾わなければなりません。その場合は申し訳ありません。
新しいデバイスの組み立て中に学んだこと:
1.完成したデバイス図(いわゆる回路図)を読み、必要なものを見つける方法。
2. Arduinoのピンとその理由。 適切なものを選択する方法。
3.コンピューター(IDEのポートモニター)から新しいコンポーネントにpingを実行する方法。 新しいコンポーネントが機能していることを確認する方法。
4.スケッチの1つがどのように書かれているかを少し知ります。
5.完成した無線回路に超音波センサーを追加する方法。
タスク:完成した無線デバイスに新しいコンポーネントを追加します:ステーションを切り替えるために使用するための超音波距離センサー。
Arduinoだけとこのセンサーがある場合は、このプロジェクトに参加して、テキストで説明されているすべての手順をほぼ完全に繰り返すこともできます。 この場合、このような興味深い超音波ラインをセットアップした瞬間に停止します。 さらに進んで、手のひらでラジオ局を調整したいと思います。 だから。
解決策:
覚えているように、私は初心者キットを持っています 。これには、ラジオを組み立てるのに必要なすべてのコンポーネントセットを備えたArduino用の既製の拡張ボードが含まれています。 ラジオは、指示に従って、またはなくても、レゴコンストラクターほど複雑になることはありません。 ほとんどのコンポーネントは、単にボードに「誤って」配置することはできません-その足はとても便利です。 初期段階では、無線は次のようになります。
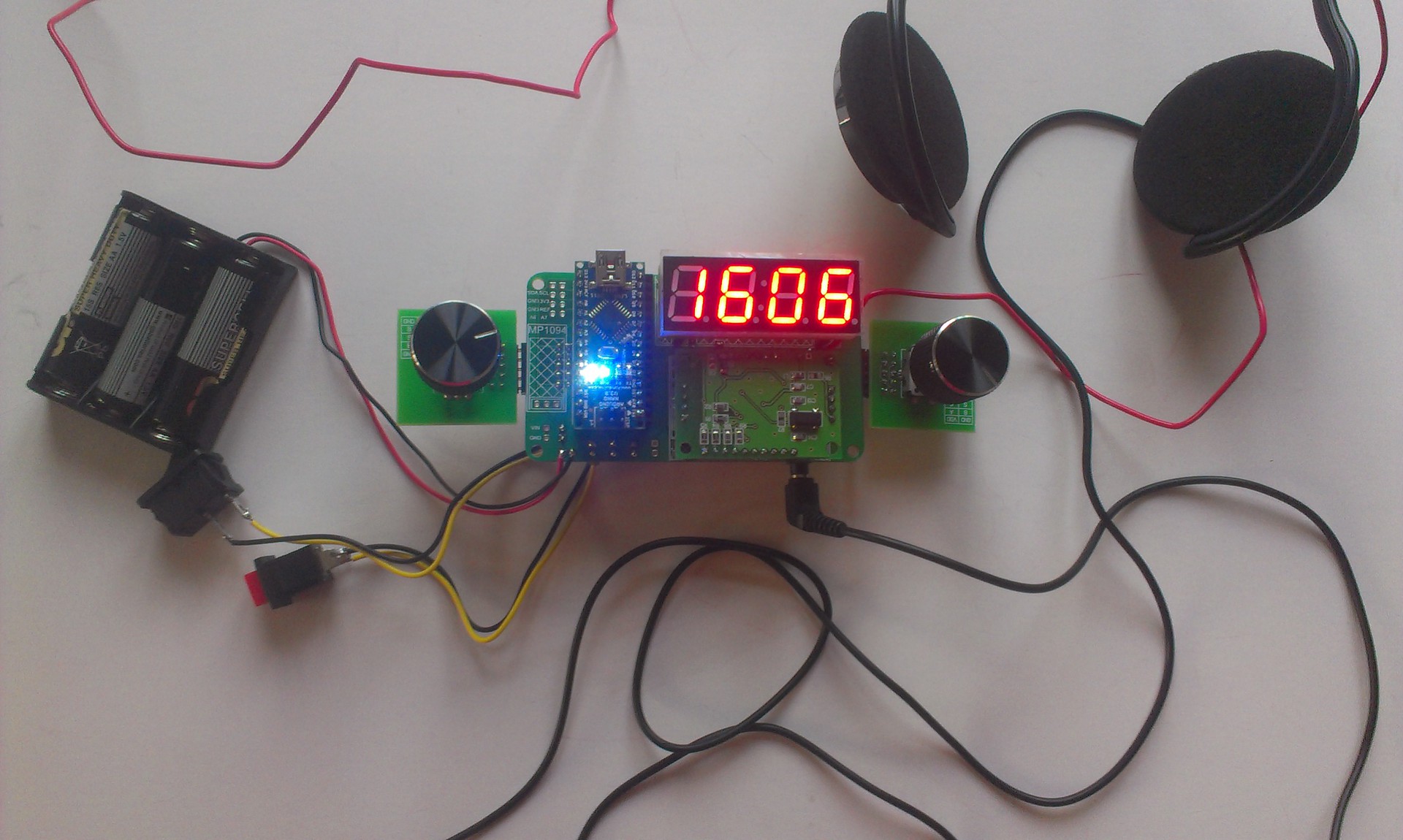
それ自体が素晴らしい。 最近の一握りの「詳細」が私と一緒にライブ音楽を演奏し始めました。 ただし、これでは十分ではないので、ここにこのセンサーを追加します。
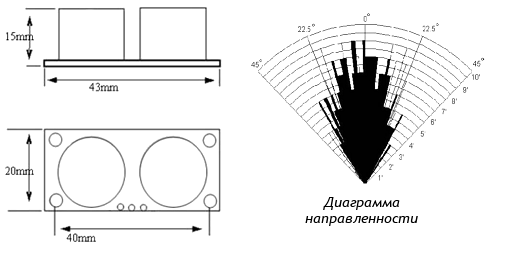
名前: HC-SR05超音波距離計
グーグル: 5ピン超音波、超音波レンジャーSRF05
図書館:
NoBlind_Ultrasonic 、私のプロジェクトで使用しています
著者が約束するように、 NewPingはより高速です
ロシア語のDatashit: PDFのTTX
優れたデータシート: 英語での仕様、最も完全な
Wiki、データシート: 簡単に、英語で
ダイアグラム上の指定:

手始めに、少し面白い物理学。
超音波距離センサーについて知っておくべきこと
彼らは、イルカ、コウモリ、およびクジラの原理に取り組んでいます。 これらの人の何人かは視力に乏しく、普通の人のように水中や夜の人は特に見えません。 したがって、彼らは音に依存しています。 この原則はエコーロケーションです。音を送り、オブジェクトに到達し、そこから反射して戻ります。 というのは、大まかに言うと*音の速度は固定されているため、音がどれだけ戻ってきたかを知っていれば、オブジェクトまでの距離を理解できるからです。
この男は、超音波で物体までの距離を測定するため、夜間に飛ぶことができ、あなたや他の木にぶつかることはありません。
人は嵐がどれだけ遠くにあるかを知ることができます:最初に雷が見えます(光の速度が速いため)、そして雷が聞こえます。 フラッシュと雷の間の距離を秒で数え、音速を知っている場合-340.29 m / s、雷雨までの距離をメートルで計算できます:
速度=時間*距離
例:
20秒* 340m / s = 6800m = 6.8 km
耳には20 kHzを超える周波数の振動が聞こえないため、センサーで使用される音は聞こえません。 しかし、動物はこの音を聞きます。

私たちに聞こえる音の範囲は20 Hzから20 kHzです。 私たちの耳は超低周波音と超音波を遮断します。
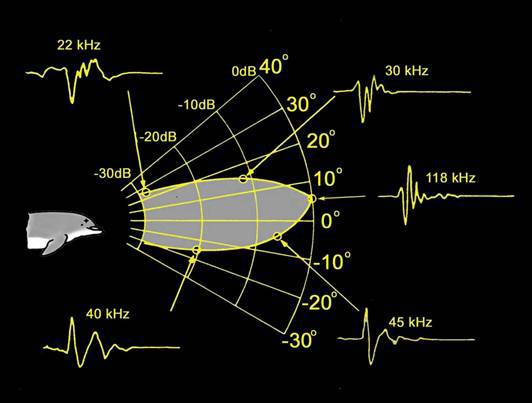
げっ歯類のリペラはこの原理に基づいて構築されています。 ペットを動揺させないように、耳のセンサーを使ってペットをつつかないでください。 彼らにとってそれは非常に大きな働きをします。 幸いなことに、200-400 cm以下の距離に音を送ります。 動物は単に音源から遠ざかり、耳を傾けない場合があります。 また、センサーからの音はすべての方向ではなく「主に前方」に散らばり、側面で散乱します。ラジオでチューニングするときに、手がセンサー自体の上に厳密に上がって、デバイスがよりよく「見える」ようにすると感じるでしょう:
いずれにせよ、動物が家にいる場合、固定プロジェクトでは、おそらく他のモーションセンサーを使用した方が良いでしょう。 そのため、たとえば、赤外線を使用して距離を測定できます。この場合、IFCセンサーを使用します。
そしてもう1つの重要なポイント。 たとえば、猫と一緒にラジオ局を切り替えることはできません。 実際には、音はふわふわした物体から何らかの形で反射されます。つまり、音はそれらに吸収されます。 それが、壁が担当者に柔らかいもので布張りされている理由です。ミュージシャンがスタジオでフルボリュームで演奏している間、ミュージシャンが聞こえないように防音処理されています。

リハーサルベースの柔らかい床はほこりを集めるだけでなく、音も吸収します。
* より正確には、 音速は伝播する媒体の温度と密度の影響も受けます。
気体の音速は温度が高くなると速くなるため、空気が高温になるほど音の伝播が速くなります。 気温が1°上昇すると、音速は0.59 m / s増加します。 雷雨の状況では、音速の値のばらつきはそれほど大きくないため 、音速はほぼ固定されています:冬には霜がなく、雷雨はありません、夏には原則として+50-+100-私たち。 =)音波の伝播についてもっと知りたい場合は、たとえば、 この記事が気に入りました 。
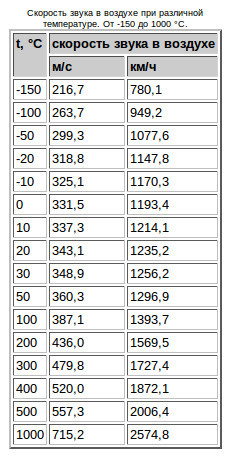
表からわかるように、雷雨までの距離を計算する際に、音速を340 m / sとしても、それほど間違えられません。
多くの用語と速いペースのために、超音波センサーの動作原理に関するこのビデオを完全に理解することは私にとって難しいですが、それを見て、聞くのは非常に楽しいです。
割り当て:上記のビデオを見ることができた場合、センサーに1つのボードに2つのセンサーがある理由の質問に答えてみて、コメントに答えを書いてください。
これですべてです。 おめでとうございます、あなたは音の伝播とエコーロケーションのエキスパートです! 先に進むことができます。
Arduino用の拡張ボードへのセンサーの取り付け
センサーをどこに接続しますか? 彼のために場所を選ぶ方法は? 拡張ボードに空きスペースはありますか? すぐにセンサーを拡張ボードとArduinoの脚自体の両方に設置できるように予約してください。 そして、それらをどのように選択するか、今私たちは見つけます。 だから。
「ダイアグラム」のセクションから、完成したシールドの図をここから取り出します。 これは次のようなものです。
これは回路図と呼ばれます。 基本的には何が接続されているかを示しますが、この回路はボード上のコンポーネントの実際の配置を反映していません。 しかし、理論的には、読みやすく便利です。 最初は不便でした 最後に、Arduinoには実際には1本の足がありませんが、この図ではD2〜D6の足があり、最初は単純に私のパターンが引き裂かれています。 しかし、回路が非常に基本的であることに慣れて、すべてを「正方形」の状態に単純化し、「何が何に接続されているか」という質問に単純に答えると、 それで作業しやすくなります。
慣習を読むために、短い「辞書」を使用できますが、特に図は主にボード部品ではなく既成のコンポーネントを反映しているため、ここでは実行しないことをお勧めします。 怖がらないでください。この図では、1つの新しいセンサーのみの「場所」を見つけようとします。 ボタンは図の下部に示されていることに注意してください。
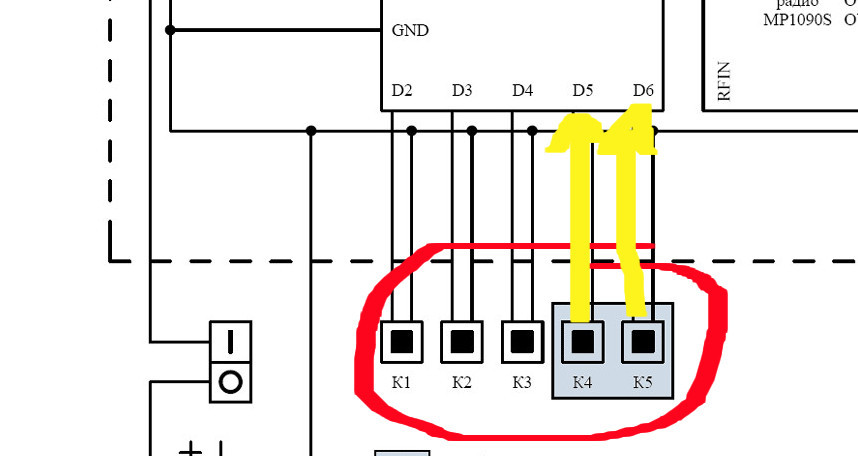
それらの3つ、K1〜K3が含まれています。 指示に従ってラジオを組み立てたときに、必要な場所ですでに「スタック」しています 。 ただし、ボードにはさらに2つの「ボタンの下」ソケットがあります。K4とK5です。 4つの穴のように見えますが、マークが異なります。 ボードに正方形の接点で示される穴のペアにのみ興味があります。
ホステスへの注意:
ボタンに2つの連絡先があり、一度に1つの連絡先を使用するのはなぜですか?
。
- 正方形のコンタクトは、ArduinoラインD5およびD6につながります。 ラウンドは「地球」です。
- ボタンを接続するには、2つの連絡先が必要です。 ボタンを押すと、信号ラインが閉じ(抵抗器を介して電源に引き上げられ)、グランドになります。
- センサーを接続するとき、アースは電源にのみ必要です。 Arduinoコネクタから少し後で地球を取得するため、この場合は2番目の接点は必要ありません
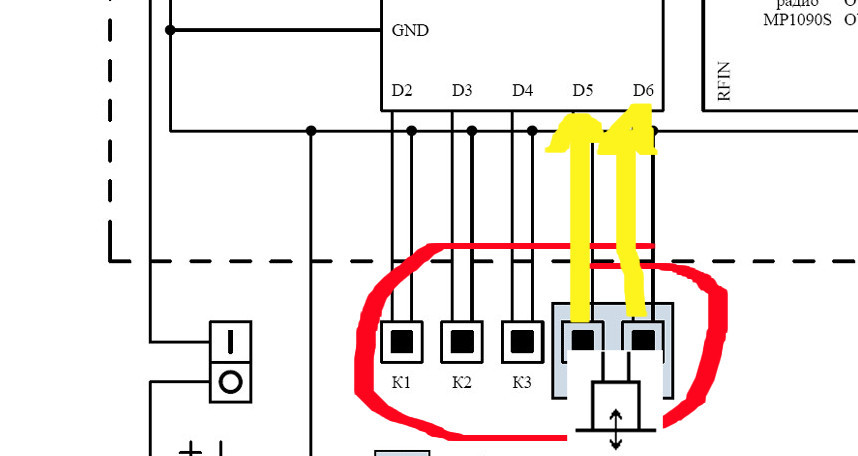
これが、センサーで回路を補完する方法です(Photoshop Mad Skills)
タスク:無線デバイス全体の回路図をもう一度見てください。 Arduinoがまだ「無料」であるのはどのくらいの足ですか? 超音波センサー以外に、このデバイスの一部として、このArduinoに何か他のものを掛けることができますか? コメントであなたの答えを待っています。
はんだ付けする!
Arduino用の拡張ボードに穴がある場合、いわゆるピンコネクタ\コネクタ\ピンを追加できます。これは、文字のPLS-XXXで示されます。XXXの代わりに、ピンの数に応じて番号が必要です。 それらは長い櫛の形で販売されており、PLS-1、PLS-2などを個別に分離できます。 次のようになります。
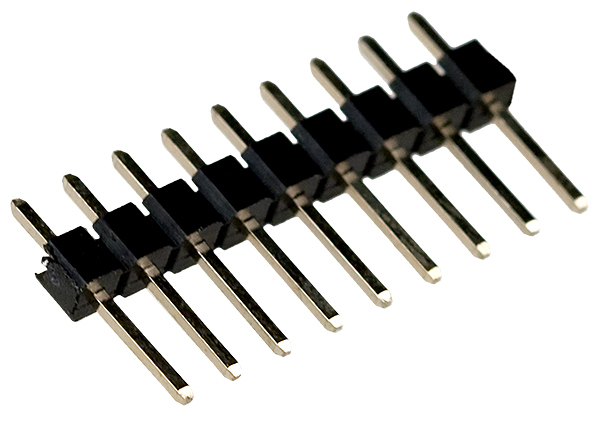
家庭でかけがえのないもの! Arduinoを巻き上げた場合。 そのため、接点K4とK5には2つの穴があるため、PLS-2と呼ばれます。 1つのピンを正方形部分に追加し、PLS-1の2つの部分を噛み合わせます。 これではんだ付けできます。
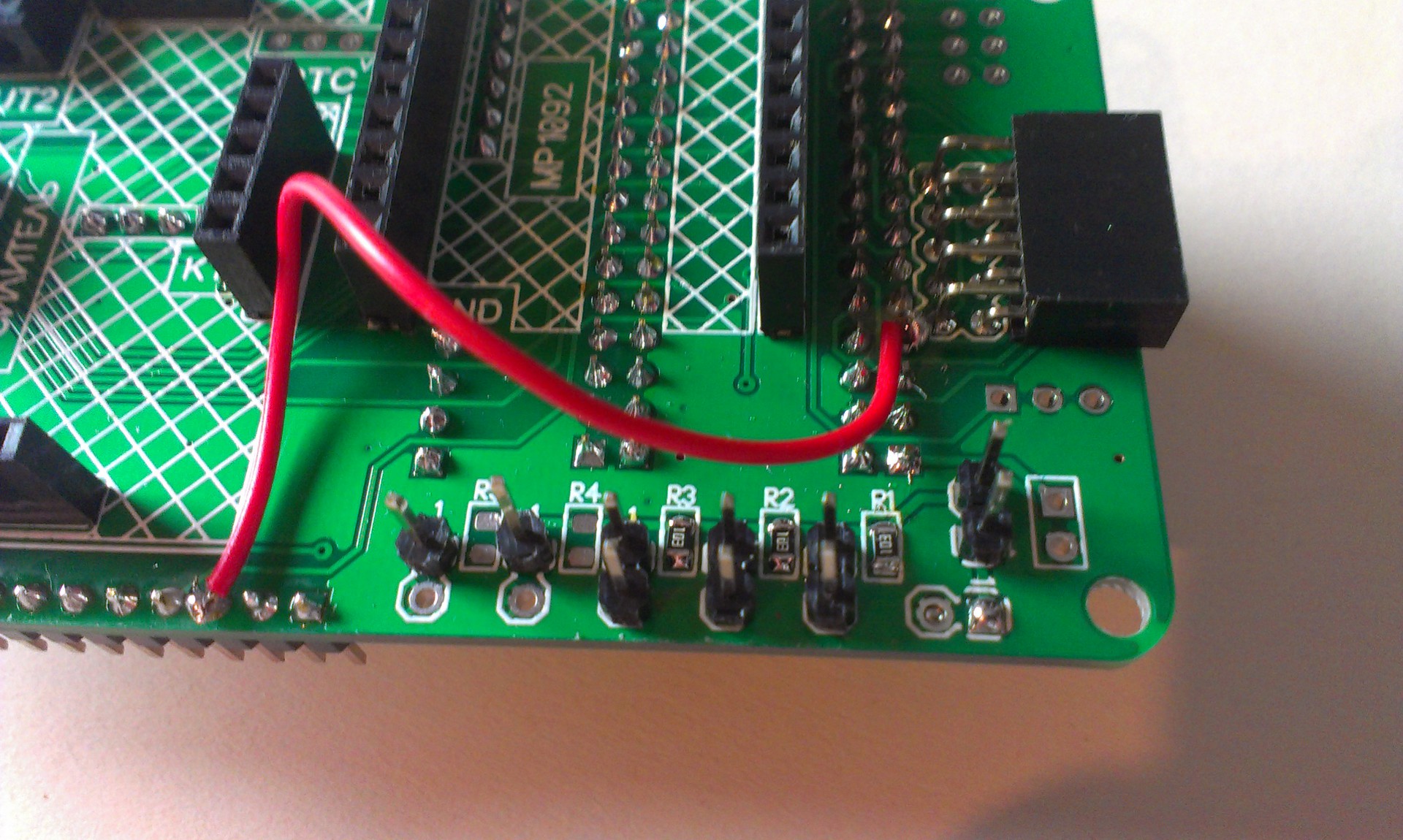
千の言葉の代わりに:これは上の図のボタンと同じ場所ですが、今ではボード上に表示されています。
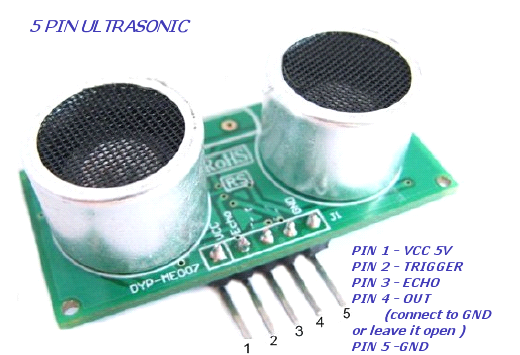
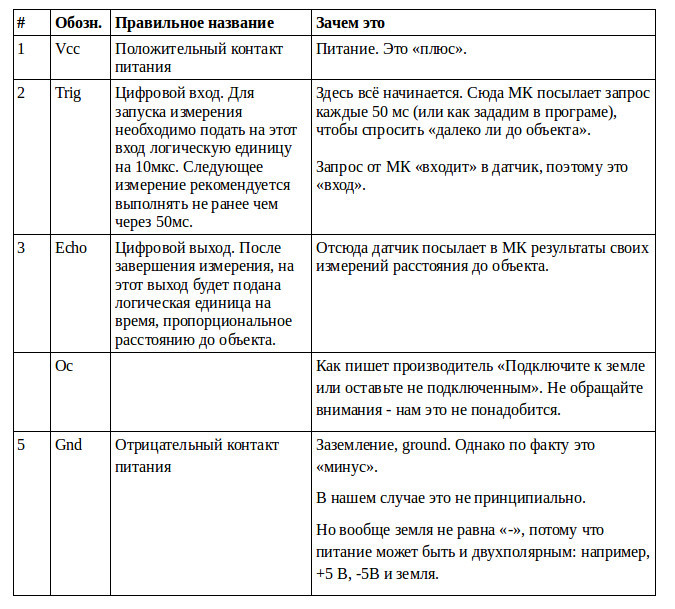
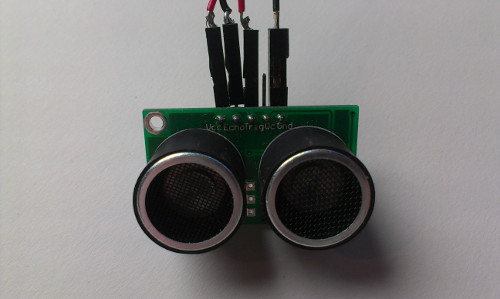
センサーピン
センサーには5つのピンがあります。 彼らは私たちが「彼に質問する」、「応答」を得ることができます。 さて、電源に接続してください。 どのピンが何を意味するかという情報は、 データシートまたはセンサーを購入したストアのウェブサイト から取得できます。 残念ながら、原則としてそこに詳細に署名されていないのは残念です。したがって、特に私たちの記事では、センサーピンを知ります。
MKはマイクロコントローラーです。 Arduinoは、必要に応じてプログラミングできるマイクロコントローラです。
特徴的なのは、 ほとんどの海外のサイトでもOcピンの目的がぼやけていることです。 そこに彼らは書いている:「Ocピンの目的はまだハッキングされる必要がある」。 数分間のグーグルでハックできました。 公式データシートには 、この連絡先は何にも接続されていないと記載されています( 笑) 。
ここではすべてがシンプルであり、予測可能でさえあります。電源用の2つの接点と、信号を送受信するための2つの接点です。 したがって、4本の母線を取り、ボードに着陸するためのセンサーを準備します。
これまでは、すべてがうまくいきましたが、4本のワイヤのそれぞれをどこに接続するのですか?
そのような逸話があります。ある人はデッドループの作り方を学びたいと思っていました。 彼は航空雑誌を購入しましたが、それは記事に記載されており、飛行機に乗って飛びました。 最初はすべてうまくいきました。彼は雑誌に記載されている指示に従い、デッドループに入りました。 その後、彼はページをめくって、そこで次の号でデッドループからの脱出を読んでください。
私の記事によれば、デッドループを作ることを学んでいないのは幸運です。 少し休みますので これまでのところ、読みやすくて興味深いものであったと思います。 これで、ポストの最後の2番目の部分を準備するまで時間があります。
- センサーを接続するArduinoのピンとその理由
- 新しいコンポーネントのパフォーマンスをテストする方法
- 超音波を使用してラジオ局を切り替えるために必要なスケッチとライブラリ。
残りの質問に答え、完成したデバイスを収集し、プログラムします。 アップデートを購読 -喜んでいます。
今、この質問に答えることをお勧めします:Arduinoであなたにとってより興味深いものは何ですか?コンポーネントを組み立てたり、デバイスをプログラムしたりするには? なんで?