これを行うために、オープンソースの
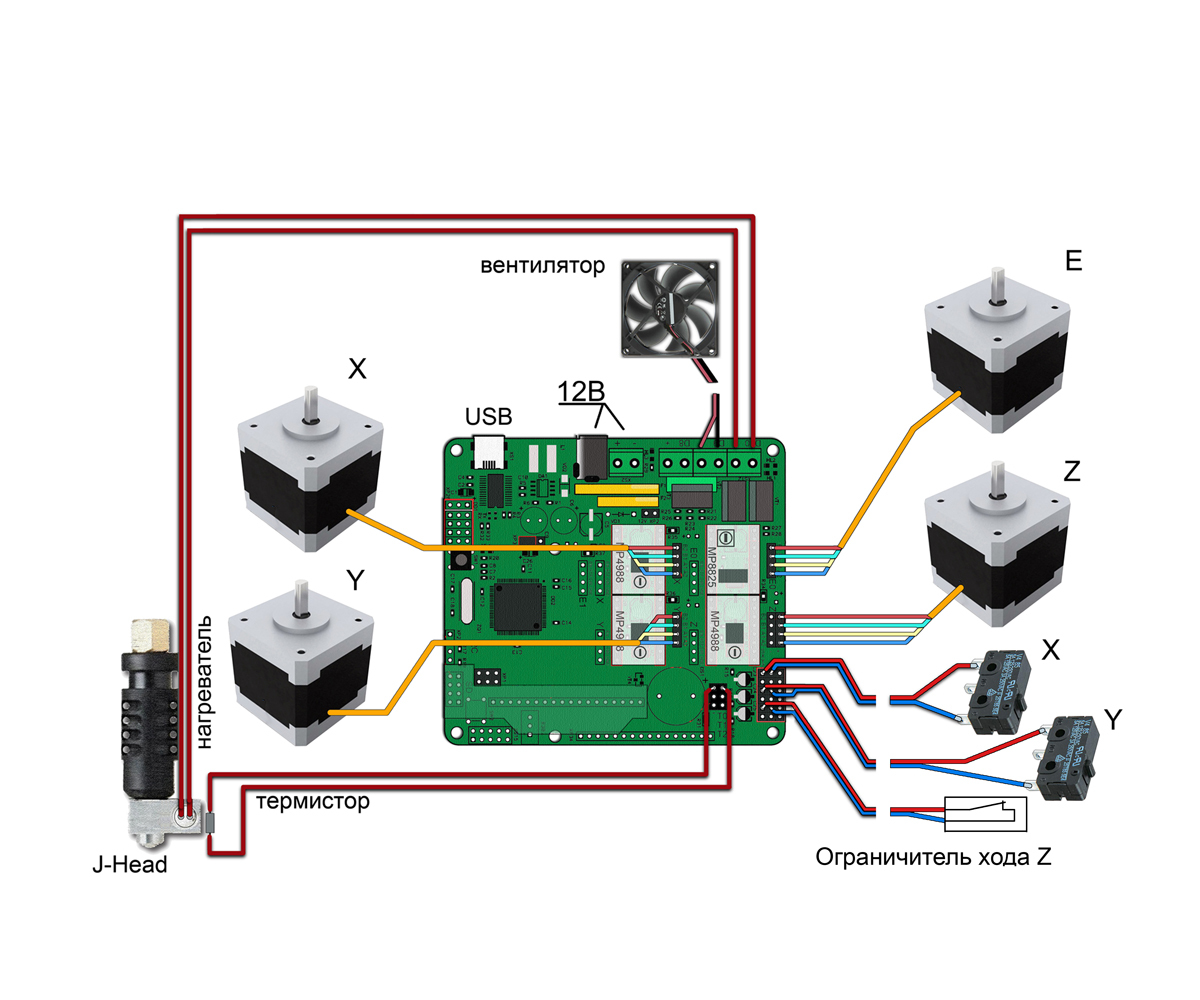
Mastertronics制御ボードには、ボード上にArduino MEGA 2560マイクロコントローラーが搭載されています。これを介して、コンピューターと通信し、このボードに接続されているすべてを制御します(図を参照)。
3Dプリンターの操作のアルゴリズムは次のとおりです。
1)完全に組み立てられた設計があります( パート1 )
2)ミニUSBケーブルをMastertronicsコントロールボードとコンピューターに接続します
3)次に、ファームウェアMarlin_MC5でマイクロコントローラーをフラッシュします
( ここで私のプリンターで使用するバージョン)
4)コンピューターでRepetierホストソフトウェアを実行する
5)Repetierソフトウェアでプリンターパラメーターを設定する
6)プリンターとの接続を確立します
7)電源を制御ボードに接続します
8)コントロールボードとそれに接続されている電子機器の操作性を確認します
9)必要に応じて、Marlinファームウェアを変更します
ポイント3から始めましょう
これを行うには、Arduino IDEプログラムを実行する必要があります。[ツール]タブで、Arduino Mega 2560ボード、ATmega 2560プロセッサー、およびcomポートを選択します。

ダウンロードしたMarlin.inoファームウェアでファイルを開き、アイコン->ダウンロードをクリックし、コンパイルしてマイクロコントローラーにロードするまで待ちます...
次に、アイテム番号4に移動します
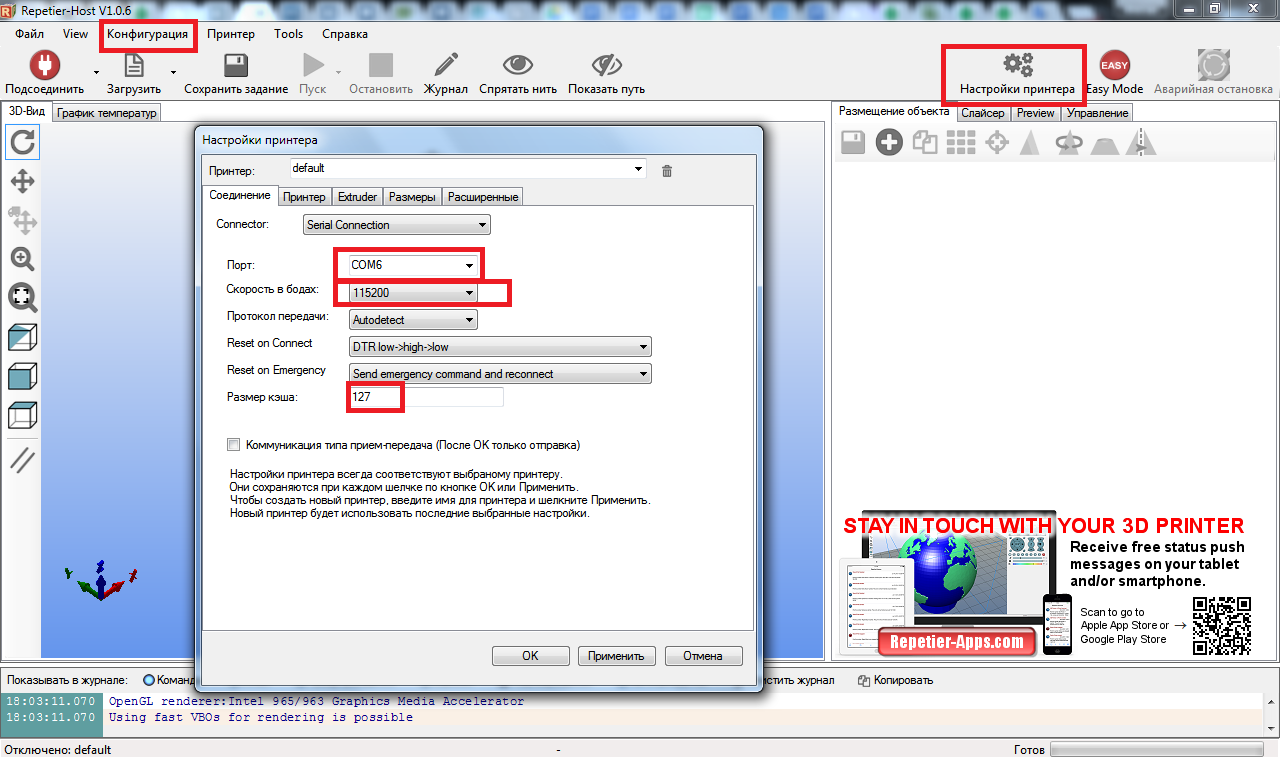
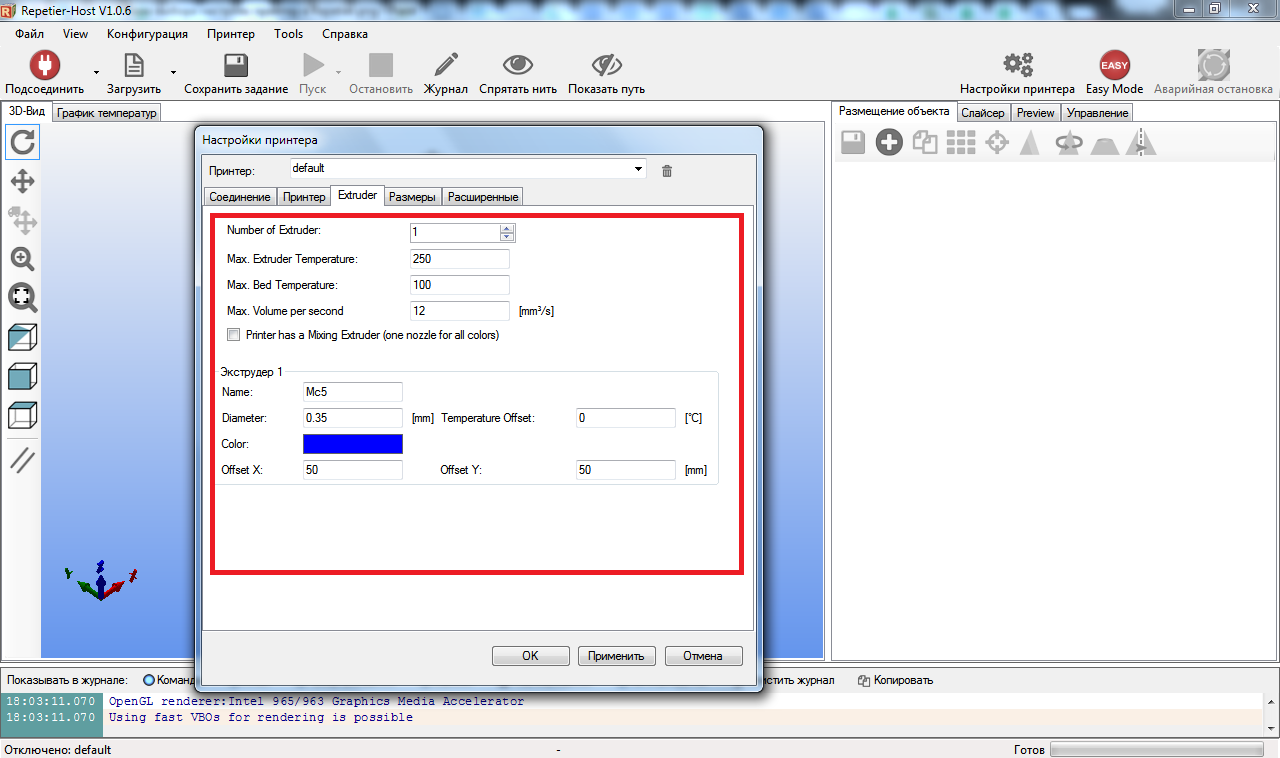
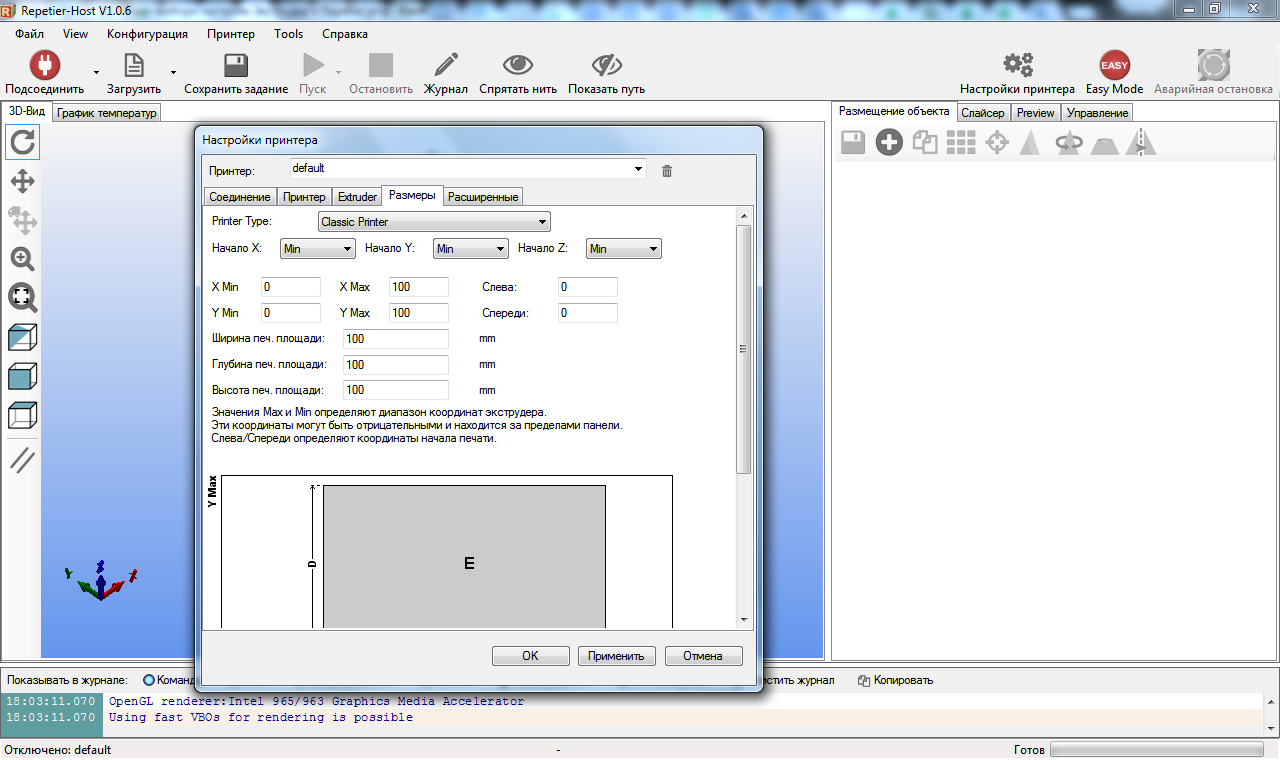
Repetierプログラムのメニューで、構成->プリンター設定を選択します。
ここで、COMポート、ボーレート、キャッシュサイズを設定する必要があります
プリンター、押出機、印刷エリアのすべてのパラメーターと同様に:
プリンター設定 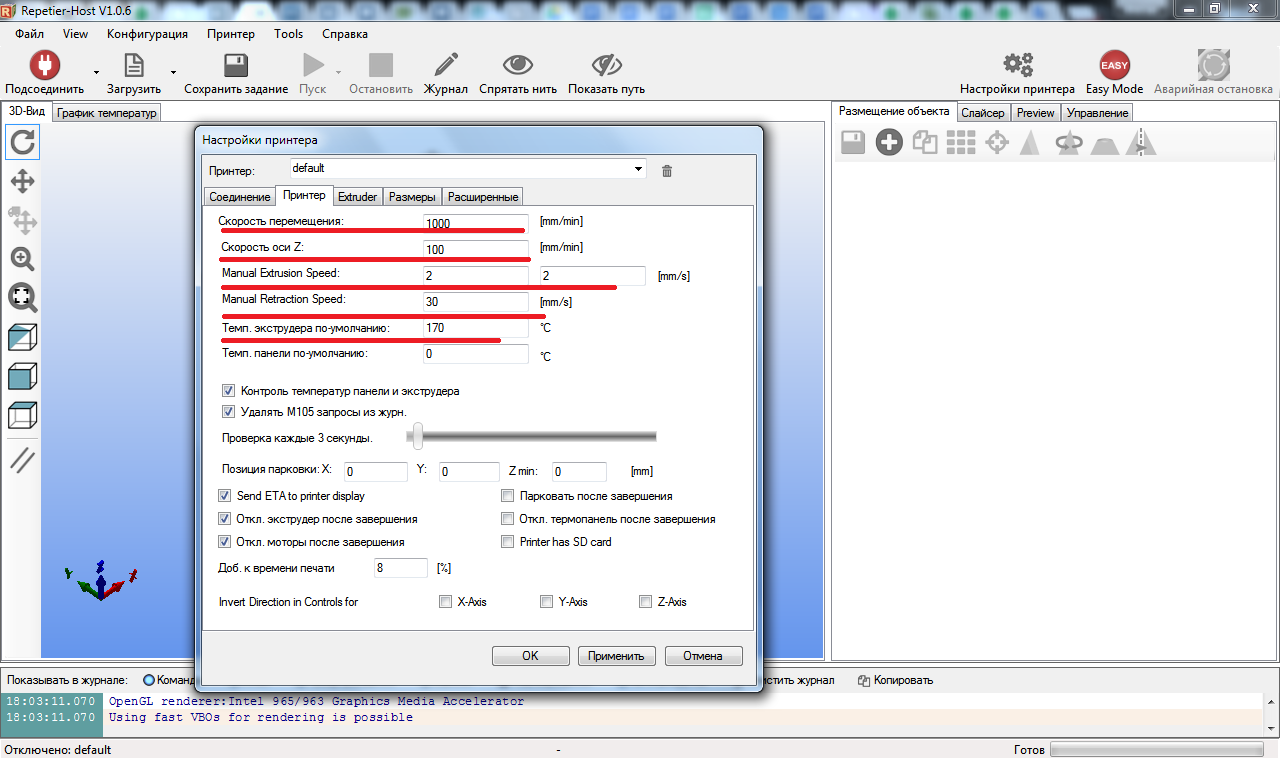
その後、安全にプラグアイコンでキーを押すことができます->プリンターを接続し、ステップで
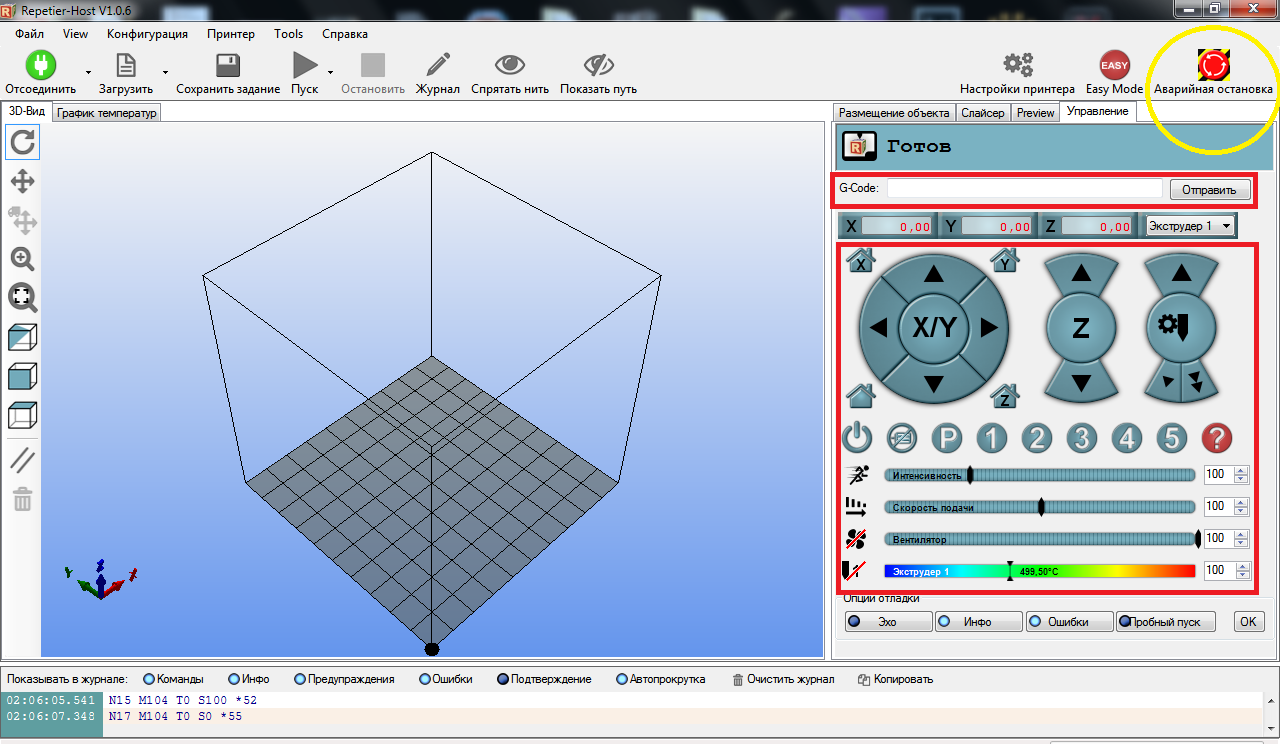
黄色で強調表示された緊急停止ボタンに注意してください。
制御ボードに正常に接続したら、G28の3軸すべてに電源を供給して駐車コマンドを送信するか、中に文字のない家の画像が表示されたボタンを押します。 モーターとリミットスイッチが正しく接続されている場合、プリンターはリミットスイッチが作動するまで各軸を動かし始めます。 したがって、3つの軸すべて(原点位置)にゼロ座標が設定されます。 これは笑うことを意味します。
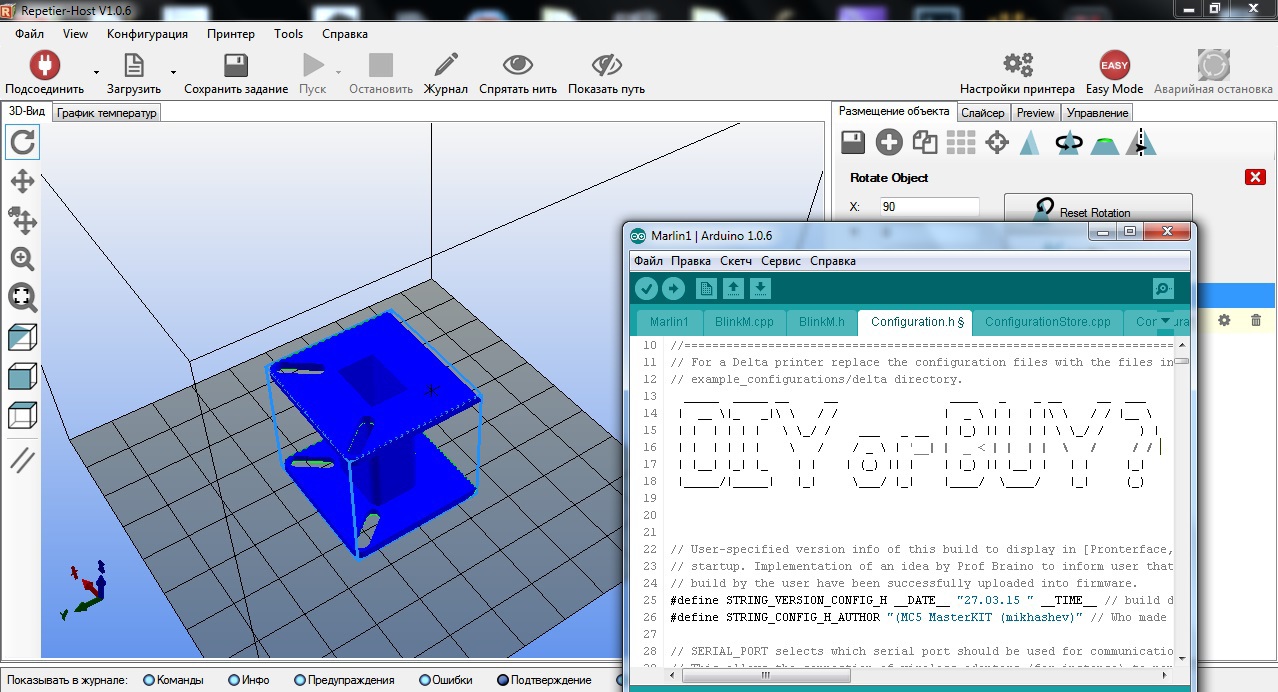
何か問題が発生した場合は、緊急停止ボタンを押して電源を切り、考えて、モーターとリミットスイッチがボードに正しく接続されていることを確認し、ドライバーの下に取り付けられたジャンパーを取り付けます。 すべてが正しく接続されているが、正常に動作しない場合は、Configuration.hタブでMarlinファームウェアを開き、コード行の制限スイッチのロジックを確認します。
const bool X_MIN_ENDSTOP_INVERTING = false; //値を(trueまたはfalse)trueまたはfalseに設定して、エンドストップロジックを反転します。
const bool Y_MIN_ENDSTOP_INVERTING = false;
const bool Z_MIN_ENDSTOP_INVERTING = true;
const bool X_MAX_ENDSTOP_INVERTING = true;
const bool Y_MAX_ENDSTOP_INVERTING = true;
const bool Z_MAX_ENDSTOP_INVERTING = true;
駐車中の車軸の移動方向に問題があったため、ファームウェアコードのリミットスイッチのロジックを変更する必要がありました。
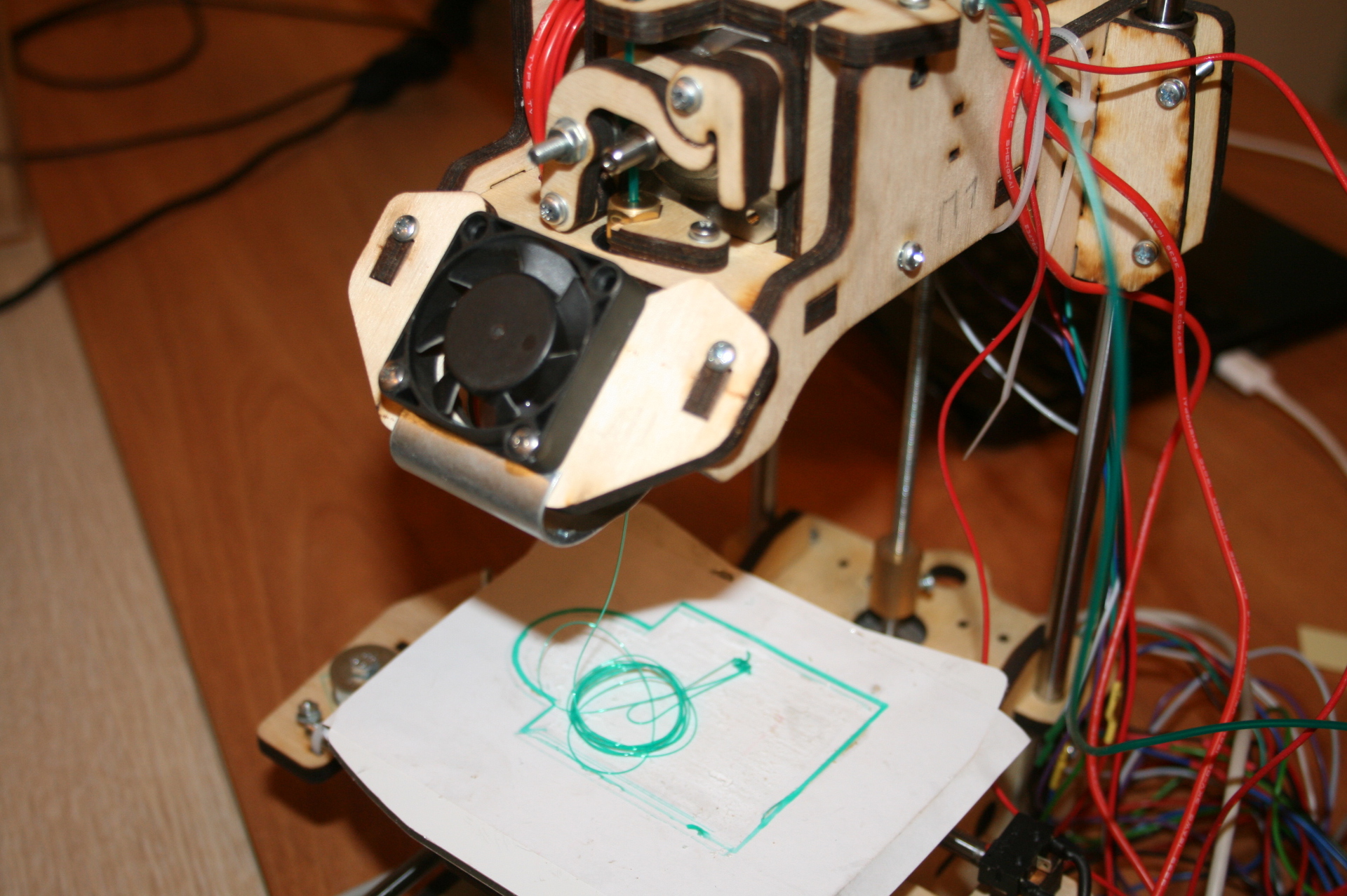
次に、押出機のテストを開始できます。
これを行うには、温度を100度に設定し、温度センサーを監視します。 すべてが問題ない場合は、200度に加熱してから、プラスチック糸を挿入し、Repetierプログラムで押出機の手動制御を使用して数十センチ押します。 この段階では問題はありませんでした。
この時点で、プリンターソフトウェアの準備はほぼ完了しています。 次に、3番目の魅力的な部分である3D印刷自体に進みます。3D印刷自体は、設定に微妙な要素があり、そのような製品を印刷しないようにマスターする必要があります。
第3部では、スライサーとは何か、印刷用の3Dモデルを「カット」するための設定方法、3Dモデルの要件、および3Dプリンターの取得と調整がそれほど容易