すべてのソースとスキームは、記事の最後にあります。
タスクは次のとおりです。
-最大のシンプルさ、最小の接続とワイヤ。
-インストールの速度。
-円の中には、同時に複数の車が存在する可能性があります。
-車は厳密な順序で進み、順序を追い越して変更することはできません。
-線を横切ることから始めます。
Arduinoを使用した経験はほとんどなかったので、Arduinoを基礎として使用しました。 また、ラップトップを放棄することを決定し、モビリティのために、Androidアプリケーションに置き換えます。私たちは知らない初期のJava言語を習得します。
部品の選択
ラインクロッシングセンサー 。 最初は、開始/終了時に片側に取り付けられ、超音波距離センサーで交差点を決定する1つのユニットですべてを実現したかったのです。 自宅でも機能しましたが、路上ではすべてが違っていました。 センサーの測定値は絶えずジャンプし、風や車以外のすべてに反応しました。 赤外線の方向に掘ることにした。
車のヘッドライトや太陽の赤外線ダイオードからの光を正確に区別するために、周波数変調を備えた受信機を選択する必要があります。 選択は、完成したセンサーABT-30mで決まりました。 たとえば、ガラスは赤外線のみを透過し、ヘッドライトと太陽の光を遮断します。 集束レンズがあり、センサーの対応する出力に接続するだけで済みました。 私が理解しているように、そのようなセンサーは、ホームアラームの境界を保護するために使用されます。 今後、選択が成功したと言います。

バッテリー ABT-30mは12vで駆動し、Arduino miniは12vバッテリーで駆動できるため、12vを使用することにしました。 私は、外部からの追加ユニットではなく、デバイスケースの内側に収まるように最小サイズを探していました。 市場では、まったく収まらない自動車用バッテリーと、UPSからのバッテリーだけを見つけることができましたが、これも非常に大きかったのですが、極端な場合には、両方とも適切でした。
最終的に、私は幸運でした、そして、私は中国の店で2つのマッチ箱のサイズで12vと4000mAhのバッテリーを見つけました、それは非常に良かったです。 後に、これらは熱収縮で直列に接続された「ノキアのバッテリー」であることが判明しました。

LED 従来の12V RGB 10W:

Bluetooth 標準HC-06モジュール:

組立
これがスキームです。 Arduinoは5脚と6脚でBluetoothに接続し、ソフトウェアシリアルを介して動作します。 LEDは12vで駆動され、arduinoは5vを生成するため、RGB LEDはトランジスタを介して9,10,11脚に接続されます。 交差点センサーからの信号は2本の足に巻き上げられ、中断によって機能します。


その結果、こうなりました。 1つのユニットはレシーバー(内部にワイヤーの束)、2つ目はトランスミッター(内部にバッテリーのみ)、およびある種の固定式懐中電灯から作られた信号機(3つの色のLEDと紙からのディフューザーがあります)です。 信号機にはワニが付いており、通常のパッチコードでメインモジュールに接続されています。




モバイルアプリ
コンピューターの代わりに、結果を表示し、Androidの携帯電話から起動を制御することにしました。 また、このプラットフォームの最初の開発経験であり、Javaの最初の経験でもありました。 その結果、次のようなアプリケーションが得られました。


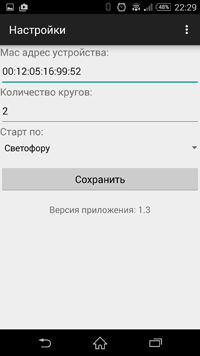
次のように機能します。 送信機と受信機は道路の異なる側に配置され、信号機が接続され、便利な場所に設置されます(設置は非常に高速です)。 アプリケーションでは、Arduinoとの接続を確立し、参加者を追加します-開始する順序で。 アプリケーションでそれらを起動します。
「開始」ボタンを押すと、信号が緑色に変わり、ラインの交差点でカウントダウンが始まります。 Arduinoは、アプリケーションが起動されてからミリ秒単位の数をアプリケーションに送信するため、回線が交差するたびに送信されます。 次に、これらの値の差に基づいて、到着時間が計算されます。 データ転送の遅延は重要ではなくなります。
今後の計画
クラウドと同期して、結果をリアルタイムで大きなモニターで確認したり、自宅にいながらサイトに移動したりすることができます(Meteor.JSを試すのは非常に興味深いです)。 また、マイナーなバグを修正し、デバイスをモジュール化して、さまざまなトラック構成に使用できるようにする必要があります(たとえば、異なる場所で開始および終了します)。 参加者を示す必要があります(おそらくrfidタグ...)
推定費用
赤外線センサーABT-30m(1350)
Arduino mini(135r)
Bluetooth HC-05(270p)
NチャネルのIRF530トランジスター(40p 3pcs)
2つのバッテリー12V 4000mAh(820* 2pcs)
10W RGB LED(160p * 3pcs)
ワイヤー、ハウジング、コネクター
合計:〜4000r-5000r
すべてのソースはオープンで、 Bitbucketで利用できます。