私は、RASの一般物理学研究所で働いています。 私たちの研究室のプロファイルは、レーザーリモートセンシング、特にLIDARです。 動物の種類がわからない場合は、たとえばWikipediaで読むことができます。 ライダーはレーザーレーダーとも呼ばれます。 LIDARの基本的な違いと利点は、その助けを借りて、リターン信号の遅延によってセンシングオブジェクトまでの距離を測定できるだけでなく、オブジェクトの構成と特性に関する情報を(信号スペクトルから)取得できることです。 たとえば、貯水池の深さによる水の温度プロファイルのLIDAR決定の方法があります。
非接触測定は正確な場合にのみ有用であるため、リモート測定の結果を接触測定で較正するために、編組、つまり1行に複数の温度センサーのループを作成することにしました。
鉄
LIDARを使用した非接触方式では、水温を数メートルの深さまで測定できます(透明度に依存し、レーザービームが迅速に散乱し、汚れた水に遠くまで行かないことは明らかです)。 「上部」センサーから数えて1 m、さらに4 mのケーブル。
敏感な要素として、次のように密閉バージョンのデジタル温度計DS18B20( データシート 、320 kb)を選択しました。


なぜまさにこれらなのでしょうか? それらは密封されているため(笑顔)、長さ1 mのケーブルですでに配送されており、高精度を実現し、 1-Wireプロトコルに従って動作するため、通信が大幅に簡素化されます。
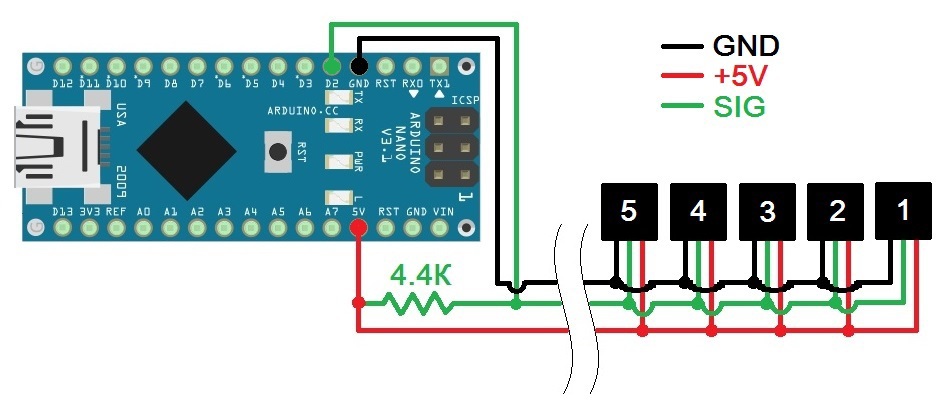
データシートの思慮深い研究は、以下の情報を提供しました。 センサーは2つの方法で接続できます。通常の方法、3本のワイヤー(グランド、電源と信号バス)、およびセンサーがデータラインから電力を受け取るスプリアスモードです。 「スプリアス」モードは、接続をさらに簡素化します(2本のワイヤのみ)が、センサーの読み取り値を歪める場合があります。 精度の低下は私たちにとって有害であり、5ボルトはセンサーを制御するArduinoボードから簡単にアクセスできるため、通常の方法でセンサーに電力を供給することにしました。
熱電対のスキーム
Datashitでは、4.7 kOhmの公称値のプルアップ抵抗を使用することを推奨しています。2.2に2つしか見つかりませんでしたが、これはデバイスのパフォーマンスには影響しませんでした。
ATMega328Pコントローラーを備えたArduino Nanoは、センサーを制御し、外界、つまりPCとの接続を担当します。
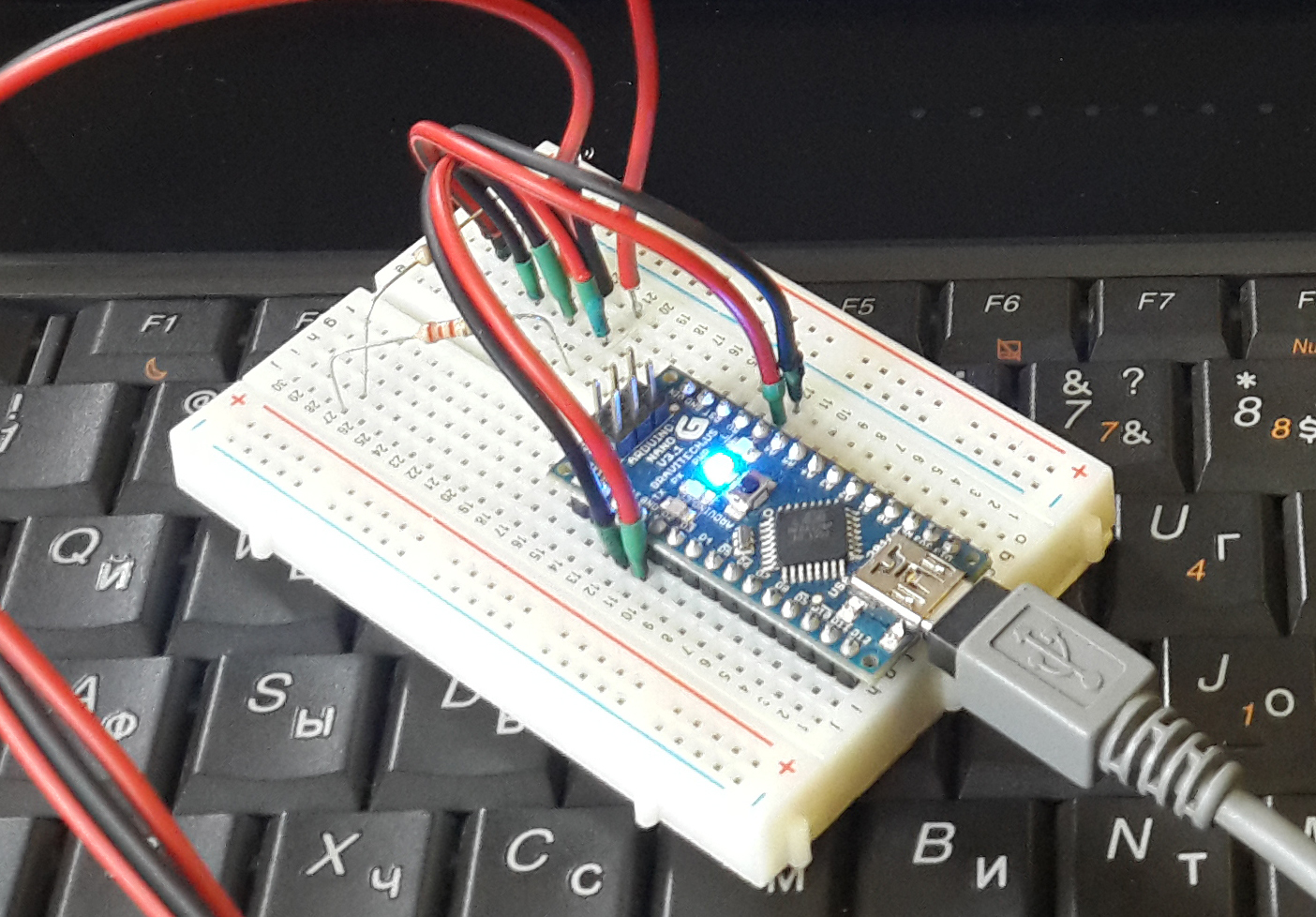
これは、ブレッドボード上で組み立てられた回路がどのように見えるかです:
これは、はんだ付けおよび絶縁後の最終バージョンです。

そして、これは全体のブレードアセンブリです(制御電子回路は分離されていません):

Arduinoをデバイスの「頭脳」として選択しました。第一に、このプラットフォームは習得が容易であるため、第二に、LabVIEWからPCから制御できるためです(以降、簡潔にするためにLabVIEW = LV)。なぜなら、私たちの研究室のほとんどのプロジェクトのソフトウェアはこの特定の環境で書かれており、他の回路に簡単な自動温度制御システムを組み込む能力は高価だからです。
ソフトウェア
このタスクの主な機能は、LV環境からデバイスを操作することです。そのため、ArduinoとLVの相互作用を調査することでプログラミングを開始することが決定されました。 ハブにはこの相互作用に関する情報はほとんどないため、許可を得て、すべてを十分に詳細に説明します。
開始する
必要なもの( ここからの情報):
- LV 2009以降。
- NI VISA(仮想デバイスと実際のデバイスを通信するためのLVモジュール)。
- Arduino IDEおよびドライバー 。
- Arduino用OneWireライブラリ-ZIPの内容を/ [[Arduino IDEインストールディレクトリ] / libraries /に配置します。
- LVの開発者は、Arduinoボードを操作するための拡張機能-Arduino用LabVIEWインターフェース、または単にLIFAを提供します。 最近、LIFAの開発は公式に中止され、代わりにNIはLabVIEW HackerのLINXツールキットの使用を提案しました。 より多くのデバイスをサポートし、より多くのツールが含まれていますが、LINXではコントローラーのファームウェアがHEXファイルのように見えるため、LIFAを使用しました。 LIFAでは、ソースは通常のArduinoスケッチです。
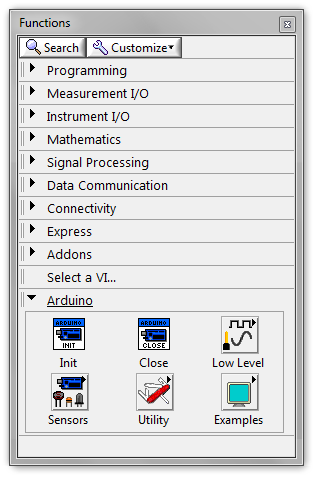
LIFAは、VIパッケージマネージャーインターフェイス(ツール-> VIパッケージマネージャー)を介してLVから直接インストールできます。 インストール後、「Arduino」サブパレットが機能パレットに表示されます。
LVでArduinoの操作を開始するには、C:/ Program Files / National Instruments / LabVIEW [バージョン] /vi.lib/LabVIEW Interface for Arduino / Firmware / LIFA_Base /フォルダーから取得したLIFA_Base.inoスケッチでコントローラーをフラッシュする必要があります。 指定されたフォルダには、Cライブラリ、ソース、および2つのスケッチLabVIEWInterface.inoとLIFA_Base.inoのファイルの束が含まれています。 1つ目はArduinoを操作するためのすべての機能の説明を含み、2つ目は短く、コントローラーにアップロードするためにすべてをまとめて収集します。
これで、LVを介してコンピューターからArduinoのほとんどの機能にアクセスできるようになりました。 ご想像のとおり、上記のすべてを把握した私が最初にしたことは、LEDを点滅させることでした。
今、原因のためにプレイしました。
1-WireプロトコルとDS18B20温度センサーは長い間存在しており、広く普及しているため、DS18B20とArduinoの併用に関する情報を探すことにしました。 そしてほとんどすぐに、どこかではなく、公式のLabVIEWフォーラムで適切なソースに出会いました( リンク )。 Topikstarterには、LabVIEW環境からArduinoを使用して温度センサーDS18B20を読み取るという同様のタスクがありました。 彼は検索を開始し、OneWire Read VIが存在するLVダイアグラムをYouTubeで見て、VIが何で、どこで入手できるかを第一人者に尋ねました。 ビデオの作者は彼の要求に応え、ソースコードと、どのように、何をすべきかの詳細な指示を提供しました。
DS18B20センサーは、次のように制御されます。「マスター」(コントローラー、マイクロプロセッサー)は、センサーが温度を測定するか、「マスター」からバイトを受信してメモリーに書き込むか、またはメモリーの現在の内容をデータラインに送信するかによって、データ線を介して2桁の16進数コマンドを送信します。 ビデオの作者は、LIFAで動作するようにArduinoにアップロードされたスケッチを変更しました。
- LIFA_Base.inoファイルで、OneWire.hライブラリを接続し、
- LVからシリアルバス経由で送信されるコマンドの処理を担当するケース構造のLabVIEWInterface.inoファイルに、温度読み取り機能を呼び出す0x1Eオプションを追加しました。
コードcase 0x1E: // OneWire Read OneWire_Read() break;
この関数は、0x44温度測定コマンドをデータラインに送信し(「変換」)、変換が完了するまで待機し、0xBEメモリ読み取りコマンドを送信し、読み取り、受信した情報から温度読み取り値を取得し、シリアルバスに送信します。
コードvoid OneWire_Read() { OneWire ds(2); // Create a OneWire Object "ds" on pin 2. Hard coding for now, because I can't declare this in a case. byte OneWireData[9]; // Defining stuff for the added OneWire function because I'm getting irritated with trying to make this fit into a case or function. int Fract, Whole, Tc_100, SignBit, TReading; // Start the Conversion ds.reset(); // Reset the OneWire bus in preparation for communication ds.skip(); // Skip addressing, since there is only one sensor ds.write(0x44); // Send 44, the conversion command // Wait for the Conversion delay(1000); // Wait for the conversion to complete // Read back the data ds.reset(); // Reset the OneWire bus in preparation for communication ds.skip(); // Skip addressing, since there is only one sensor ds.write(0xBE); // Send the "Read Scratchpad" command for ( byte i = 0; i < 9; i++) { OneWireData[i] = ds.read(); // Read the 9 bytes into data[] } // Scale the data TReading = (OneWireData[1] << 8) + OneWireData[0]; SignBit = TReading & 0x8000; // Mask out all but the MSB if (SignBit) // If the MSB is negative, take the Two's Compliment to make the reading negative { TReading = (TReading ^ 0xffff) + 1; // 2's comp } Tc_100 = (6 * TReading) + TReading / 4; // Scale by the sensitivity (0.0625°C per bit) and 100 Whole = Tc_100 / 100; // Split out the whole number portion of the reading Fract = Tc_100 % 100; // Split out the fractional portion of the reading // Return the data serially if (SignBit) { // If the reading is negative, print a negative sign Serial.print("-"); } Serial.print(Whole); // Print the whole number portion and a decimal Serial.print("."); if (Fract < 10) { // if the fraction portion is less than .1, append a 0 decimal Serial.print("0"); } Serial.print(Fract); // Otherwise print the fractional portion }
提案されたVIは、本質的に、指定されたシリアルインターフェイスポートに16進数1Eを送信し、応答を待って読み取ります。
とても簡単です。
1つのセンサーを手動で読み取る
まず、 LIFA_BASE.inoとLabVIEWInterface.inoを指示に従って編集し、VIを作成しました。 チェックすると、すべて正常に動作します。 その後、私は何かをしましたが、後悔しました。 上記のLVフォーラムのトピック、以下のいくつかの投稿で、参加者の1人が、実際には1つのサブデバイスのみで構成される温度センサーの読み取り値を読み取るVIのバージョンを提案しました-ArduinoサブパレットからReceive.viを送信します:
単純さに誘惑され、詳細を掘り下げていないため、今後の実験ではこの単純なバージョンを無料で使用しました。 いいえ、すべて正常に動作しますが、正しく動作しますが、sensor-Arduino-LabVIEWチェーンのシナリオとVIがフォーラムから作成されたシナリオとの違いに関連する特定の微妙な点があります。 この微妙さはその後、私にある程度の頭痛を与えましたが、それについては後で詳しく説明します。
DS18B20センサーの機能の1つは、個々のインスタンスごとに固有の8バイトアドレス(ROMコード)があり、生産時に配線されることです。 これにより、理論的には1つの1-Wireラインに無制限の数のセンサーを取り付けることができます。 この機能を実装するために、特定のセンサーのアドレス指定コマンドが提供されています。
対処するには、住所を知る必要があります。 OneWireライブラリのDS18x20_Temperatureの例を使用してセンサーのROMコードを見つけ、それらをプログラムの開始時に宣言された5つの変数に書き込みました。
// DS18B20 temperature sensors' addresses: byte sensor_1[8] = {0x28,0xFF,0xBE,0xCE,0x14,0x14,0x00,0x8A}; byte sensor_2[8] = {0x28,0xFF,0x42,0x43,0x15,0x14,0x00,0xE2}; byte sensor_3[8] = {0x28,0xFF,0xED,0x55,0x15,0x14,0x00,0x8F}; byte sensor_4[8] = {0x28,0xFF,0x3D,0x6E,0x15,0x14,0x00,0x0D}; byte sensor_5[8] = {0x28,0xFF,0x5E,0x66,0x15,0x14,0x00,0x4E};
提案されたバージョンでは、OneWire_Readは値を受け取りません。 パラメーターを追加します-センサーのアドレス(8要素のバイト配列):
void OneWire_Read(byte addr[8])
各コマンドが送信される前に、センサーに対処します。
// Start the Conversion ds.reset(); // Reset the OneWire bus in preparation for communication ds.select(addr); // Addressing ds.write(0x44); // Send 44, the conversion command
// Read back the data ds.reset(); // Reset the OneWire bus in preparation for communication ds.select(addr); // Addressing ds.write(0xBE); // Send the "Read Scratchpad" command
各センサーのオプションを選択構造に追加します。
/********************************************************************************* ** OneWire temperature sensors reading *********************************************************************************/ case 0x2E: // sensor 1 read OneWire_Read(sensor_1); break; case 0x2F: // sensor 2 read OneWire_Read(sensor_2); break; case 0x30: // sensor 3 read OneWire_Read(sensor_3); break; case 0x31: // sensor 4 read OneWire_Read(sensor_4); break; case 0x32: // sensor 5 read OneWire_Read(sensor_5); break;
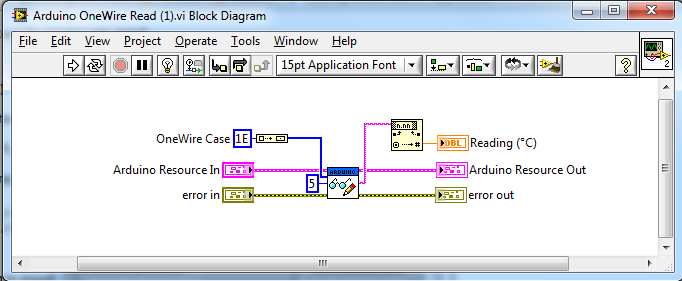
何が起こったかをテストするために、1つのセンサーの1回の調査用に小さなVIを作成しました。
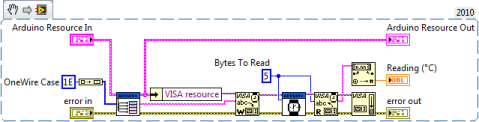
ご覧のとおり、ブロック図のケース構造を使用して、調査用のセンサーの選択を実装しました。
さらに使いやすくするために、下のスクリーンショットに示すように小さな滑走路を重ね、
Arduinoリソースクラスターとエラーは別として、滑走路は入力でポーリングするためのセンサー番号を受け取り、温度表示を文字列として出力に提供します。
やった! テストは成功しました。
自動モードでセンサーを1つ読み取ります
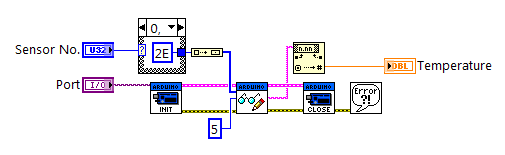
これで、1つのセンサーを手動でポーリングできます。 次のステップは、自動モードでの1つのセンサーの周期的なポーリングです。 これを行うために、次のブロック図を作成しました。
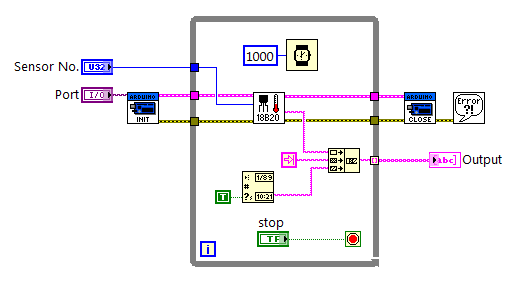
開始するには、間隔が固定され、プログラムは1秒に1回センサーをポーリングし、サイクルを停止した後、ユーザーは収集されたデータをアレイに書き込みます。 便宜上、Get Date / Time String関数を使用して各温度表示にタイムスタンプを追加しました。
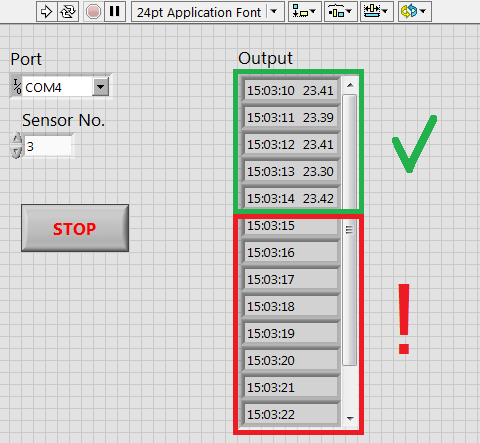
電源を入れ、20秒待って、停止します...そして、楽しみが始まります。
配列を表示すると、プログラムの開始後最初の5回だけ温度が読み取られ、その後、温度測定値のないタイムスタンプのみが読み取られます。
長い間、私は何が問題なのか理解できませんでした-LV側に間違いはないようでした。ブロック図はとてつもなくシンプルで、Arduinoスケッチコードも正しいのです。 単一の手動尋問のモードでは問題なく動作します。 他に何がありますか? Arduinoボード自体ですか? 彼女を見て、私は次を見つけました。 プログラムを開始し、ピン13でL LEDが2回点滅し、RX LEDが点滅し(コントローラーがPCから送信された温度センサーのコマンドを受信)、1秒が経過します(センサーが温度をメモリ内のバイトに「変換」し、PCが応答を待機します)、点滅TX LED(コントローラーがセンサーからバイトを受信してPCに送信)、RXダイオードが再び点滅し、2番目の経過、TXが再び点滅するなど、プログラムを停止するまで円で囲まれます。 そのため、私のスキームでは、この万華鏡は最初の〜5秒間続き、その後コントローラーが応答しなくなり、RXダイオードが連続して点滅し、LabVIEWインターフェースの実行停止ボタンでのみプログラムを停止できました。
このカタバシアのすべてが、タイミングのどこかに問題があるという考えにつながり、私はこの方向に掘り始め、VIの待機時間を変更し、スケッチで、文字通りVIのブロック図でスケッチコードを分析しましたエレメンタルですが、何も助けませんでした。 結局、
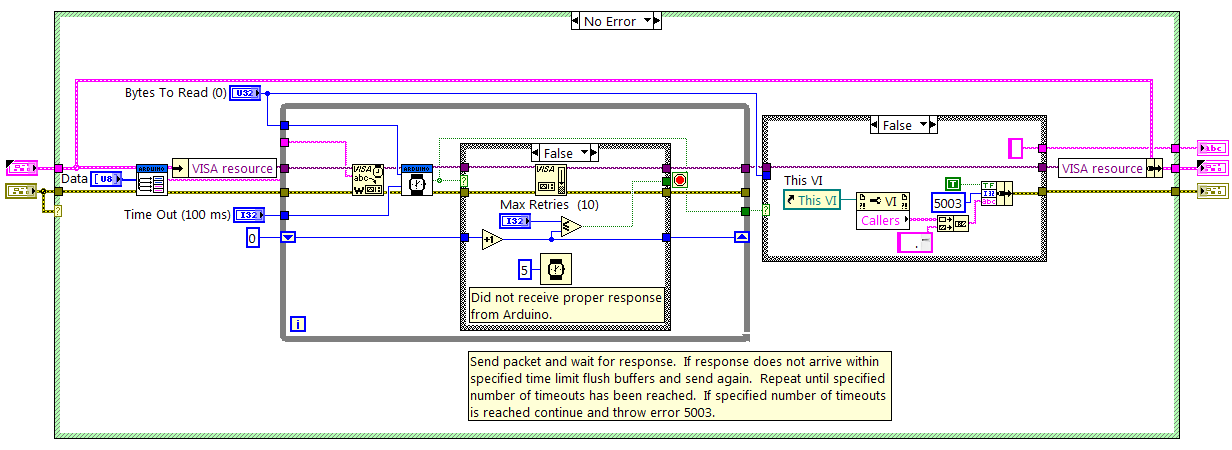
必要に応じて、Send Receiveはデータを取得し、指定された方向に送信して待機を開始します。 100ミリ秒以内に応答が受信されない場合、さらに5ミリ秒待機し、出力バッファーをクリアして、データを再送信します(合計10回の試行)。 送信、受信、マイクロコントローラー、メインVIの間のどこかで、動作中に非同期が発生して蓄積します。このため、センサーポーリングの6回目の繰り返しで、コントローラーをハングさせる送信コマンドと受信コマンドの間に何らかの不一致があります。
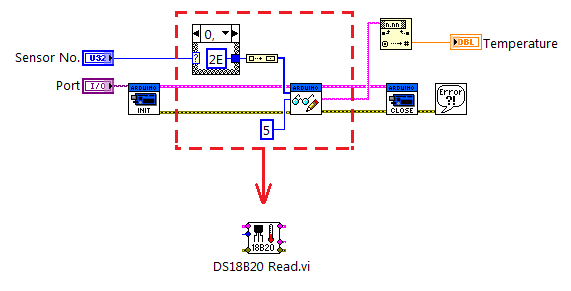
経験が示すように、見た目がシンプルなソリューションが常に最良とは限らないため、DS18B20 Read.viを再作成しました。
正直なところ、何が問題だったのか正確に言うことはできません。マイクロコントローラーとPCとの相互作用について十分な理解がありません。 しかし、私の試みの結果、問題は消え、私はそれには入りませんでした。
すべてのセンサーを自動モードで読み取ります
自動モードで1つのセンサーを読み取ることができ、5つすべてを一度に読み取ることは技術の問題です。 これを行うために、LabVIEWInterface.inoに別の関数を追加しました -OneWire_Read_All():
コード
void OneWire_Read_All() { OneWire ds(2); byte Data[9]; int Fract, Whole, Tc_100, SignBit, TReading; ds.reset(); ds.skip(); // Addressing to all sensors on the line ds.write(0x44); delay(1000); // reading sensor 1 ds.reset(); ds.select(sensor_1); // Addressing to sensor 1 ds.write(0xBE); for ( byte i = 0; i < 9; i++) { Data[i] = ds.read(); } TReading = (Data[1] << 8) + Data[0]; SignBit = TReading & 0x8000; if (SignBit) { TReading = (TReading ^ 0xffff) + 1; } Tc_100 = (6 * TReading) + TReading / 4; Whole = Tc_100 / 100; Fract = Tc_100 % 100; if (SignBit) { Serial.print("-"); } Serial.print(Whole); Serial.print(","); if (Fract < 10) { Serial.print("0"); } Serial.print(Fract); Serial.print(" "); // reading sensor 2 ds.reset(); ds.select(sensor_2); // Addressing to sensor 2 ds.write(0xBE); for ( byte i = 0; i < 9; i++) { Data[i] = ds.read(); } TReading = (Data[1] << 8) + Data[0]; SignBit = TReading & 0x8000; if (SignBit) { TReading = (TReading ^ 0xffff) + 1; } Tc_100 = (6 * TReading) + TReading / 4; Whole = Tc_100 / 100; Fract = Tc_100 % 100; if (SignBit) { Serial.print("-"); } Serial.print(Whole); Serial.print(","); if (Fract < 10) { Serial.print("0"); } Serial.print(Fract); Serial.print(" "); // reading sensor 3 ds.reset(); ds.select(sensor_3); // Addressing to sensor 3 ds.write(0xBE); for ( byte i = 0; i < 9; i++) { Data[i] = ds.read(); } TReading = (Data[1] << 8) + Data[0]; SignBit = TReading & 0x8000; if (SignBit) { TReading = (TReading ^ 0xffff) + 1; } Tc_100 = (6 * TReading) + TReading / 4; Whole = Tc_100 / 100; Fract = Tc_100 % 100; if (SignBit) { Serial.print("-"); } Serial.print(Whole); Serial.print(","); if (Fract < 10) { Serial.print("0"); } Serial.print(Fract); Serial.print(" "); // reading sensor 4 ds.reset(); ds.select(sensor_4); // Addressing to sensor 4 ds.write(0xBE); for ( byte i = 0; i < 9; i++) { Data[i] = ds.read(); } TReading = (Data[1] << 8) + Data[0]; SignBit = TReading & 0x8000; if (SignBit) { TReading = (TReading ^ 0xffff) + 1; } Tc_100 = (6 * TReading) + TReading / 4; Whole = Tc_100 / 100; Fract = Tc_100 % 100; if (SignBit) { Serial.print("-"); } Serial.print(Whole); Serial.print(","); if (Fract < 10) { Serial.print("0"); } Serial.print(Fract); Serial.print(" "); // reading sensor 5 ds.reset(); ds.select(sensor_5); // Addressing to sensor 5 ds.write(0xBE); for ( byte i = 0; i < 9; i++) { Data[i] = ds.read(); } TReading = (Data[1] << 8) + Data[0]; SignBit = TReading & 0x8000; if (SignBit) { TReading = (TReading ^ 0xffff) + 1; } Tc_100 = (6 * TReading) + TReading / 4; Whole = Tc_100 / 100; Fract = Tc_100 % 100; if (SignBit) { Serial.print("-"); } Serial.print(Whole); Serial.print(","); if (Fract < 10) { Serial.print("0"); } Serial.print(Fract); }
ご覧のとおり、いくつかの変更を加えて、単一のセンサーを5回繰り返して読み取る機能です。
また、DS18B20 Read.viをわずかに変更する必要がありました。個々のセンサーのポーリング(入力で1から5までの数字を受け取る)と、全員(入力で6)の両方で汎用的にしました。 また、バッファから読み取るバイト数も変更しました。 VIの出力ですべてのセンサーをすぐにポーリングすると、ラインはほぼ6倍長くなり、バッファーポーリング間隔が長くなります。

ほら、仲間! すべてが私が望んでいた通りに機能します。
校正
ここではすべてが準備できているように見えますが、ここでは落ち着くことができますが、テスト中に同じ条件(コップ1杯の水)に置かれた5つのセンサーすべてがわずかに異なる測定値を示しました。 したがって、それらは較正されなければなりませんでした。
これを行うために必要だったのは、摂氏0.01度の水銀温度計、足のある実験用ラック、グラス、冷凍庫からの小さな氷、電気ケトル、そして水です。 即席のインストールは次のようになりました。
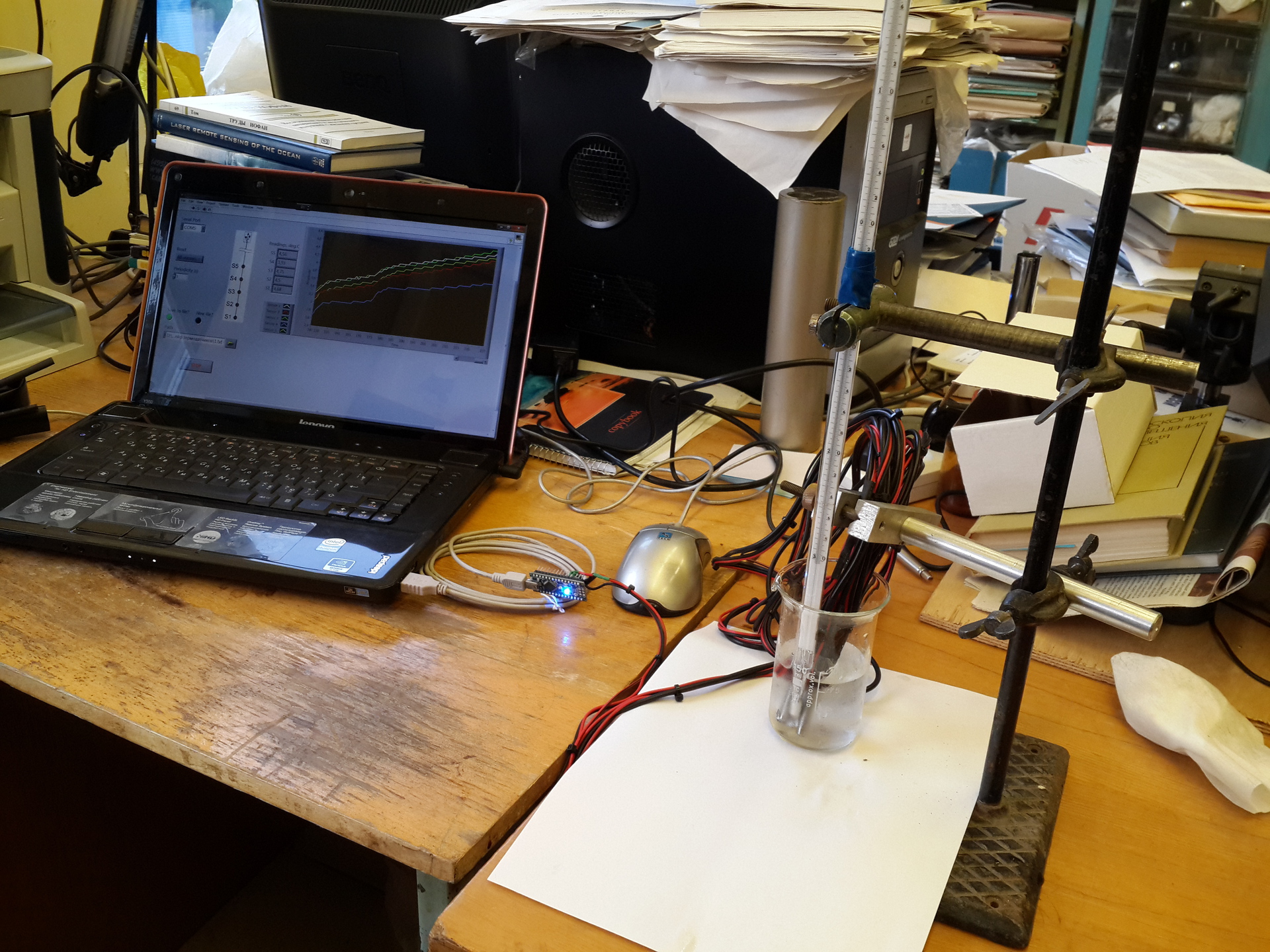
ラボ内の写真と混乱の質をおaびします。
いくつかの温度について、水銀温度計とセンサーの読み取り値を記録し、各センサーの検量線を作成しました。
例として、センサー1の検量線。
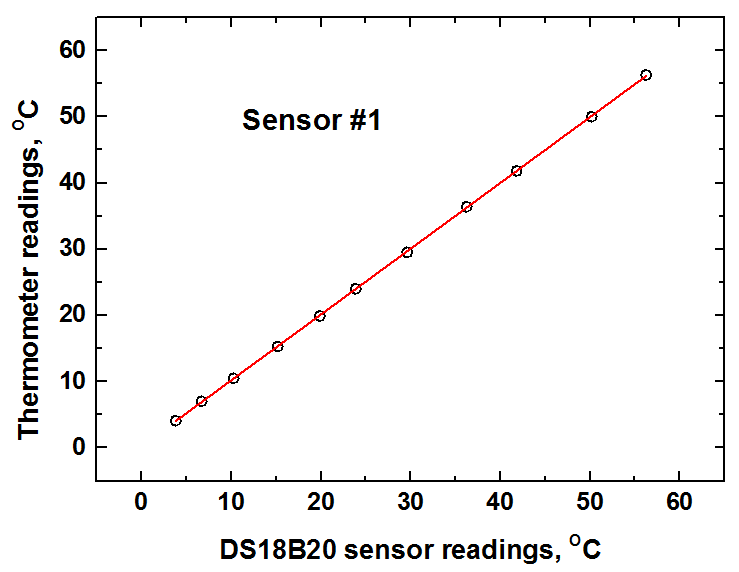
得られた曲線のパラメーターに従って、プログラムによって生成されたデータのキャリブレーション修正を行いました。
また、同じ「セットアップ」を使用して、センサーと水銀温度計の測定値を比較することにより、編組によって与えられる誤差を推定しました。 異なる温度での異なるセンサーの場合、わずかに異なり、平均摂氏0.08度です。
最後の仕上げ
Arduinoを操作するためのLIFAインターフェースは、LCDディスプレイ、サーボモーター、IR制御などを操作することで多くの可能性を提供しますが、これらはすべて便利ですが、私の場合はまったく不要なので、 LabVIEWInterfaceのコンテンツを大幅に削減しました。 ino 、 LIFA_BASE.ino 、 LabVIEWInterface.hおよびLIFA_Baseフォルダー。そこから不要なものをすべて削除します。 私はここにリストを与えません、誰かが見てみたいと思うならば、私に連絡してください、私は喜びですべてのソースを提供します。
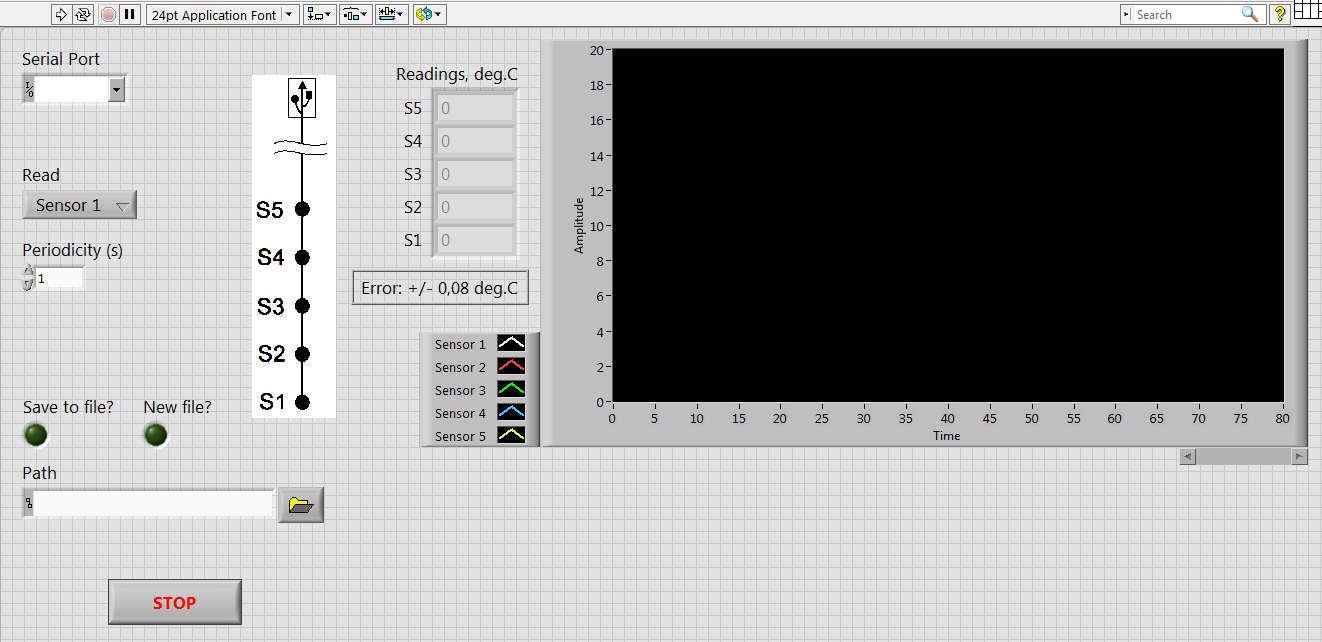
制御プログラム用に、このフロントパネルを作成しました。
Arduinoショールは、環境から保護するために、両端が密封された熱収縮チューブにパッケージされています。


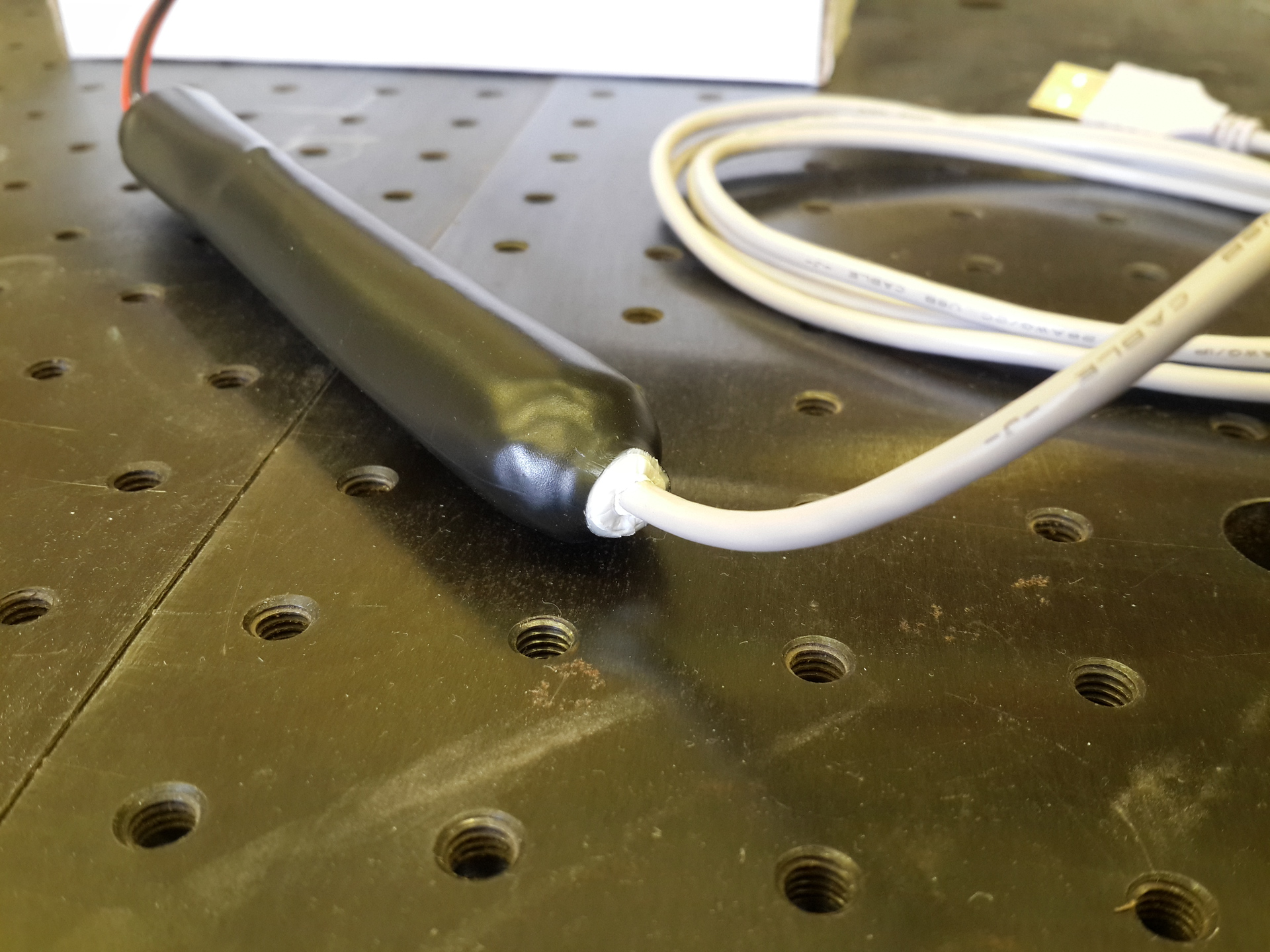
デバイスの準備ができました:

まとめ
コンポーネントと材料のコスト:
- Arduino Nano-1,900ルーブル;
- 5 DS18B20温度センサー-1950ルーブル。
- 10 mケーブル-150ルーブル;
- ささいなこと(熱収縮、ケーブルタイ、...)-200ルーブル;
合計 -4200ルーブル。
それでは考えてみましょう。 工場用の熱芝刈り機が販売されています。たとえば、平均コスト13,000ルーブルの「TK-10 / 10 thermocosa」など、Googleで検索するのは簡単です。 「しかし、同等またはわずかな精度、明らかに優れたデバッグ、信頼性、および高品質を提供する、同等のコストの工業製品の類似物があった場合、どうして急上昇したのでしょうか?」私はいくつかの理由で答えます:
- / *真面目な科学機器ではなく、上記と同様のデバイスについて話す* /既製のソリューションを購入すると、メーカーが示した特性の数を信じざるを得なくなります。 これは、生産または家庭でデバイスを使用する場合は正常ですが、科学的な目的ではありません。 製造業者が意図的に虚偽の情報を提供しているとは言いませんが、原則として、内部デバイスの複雑さ、製造に使用されるデバイスのパラメーターの評価方法については何も知らず、不正確であるか不適切な仮定が含まれていることがあります。 一般的に、科学の世界観の主な原則は「当たり前のことをする」ということです。 もう1つは、デバイスを文字通り詳細に組み立てる場合、操作のロジックを設定し、選択した方法に従ってその精度を評価することです。
- 教育的な観点から、組紐を作ることは、はんだごての取り扱い、Arduinoのプログラミング、LabVIEWを介したコンピューターとの接続の理解に貴重な経験をもたらしました。特に、私がこの後に切り替えたプロジェクトでArduino-LV-PCバンドルの研究を続けているという事実に照らして、
- 程度は低いですが、価値の問題も重要でした。
ご清聴ありがとうございました! ご質問/ご提案/批判がありましたら、私はいつもそれを聞いてうれしいです。スケッチとVIのソースコードを喜んで提供します。上で書いたように、連絡してください。
PS私のプログラミングスキルは「Hello world!」から遠く離れていません。そのため、一部の用語を不正確に使用したか、意図した目的に適していないかを厳密に判断しないでください。