当時私はロボット工学が好きでした。 彼は小さなドローンとロボットを構築した経験があり、床に沿って線に沿って進み、短期間で迷路を解決しました。 さらに、モチベーションは、毎年恒例のVEXロボティクス世界選手権のためにロサンゼルスに最近旅行したことによって上昇しました。ところで、彼らは賞を獲得することができませんでしたが、翌年にプラスのエネルギーを充電することができました。 一般に、メカニック、電子機器、コードなど、自分の手でヘキサポッドを構築することにしました。
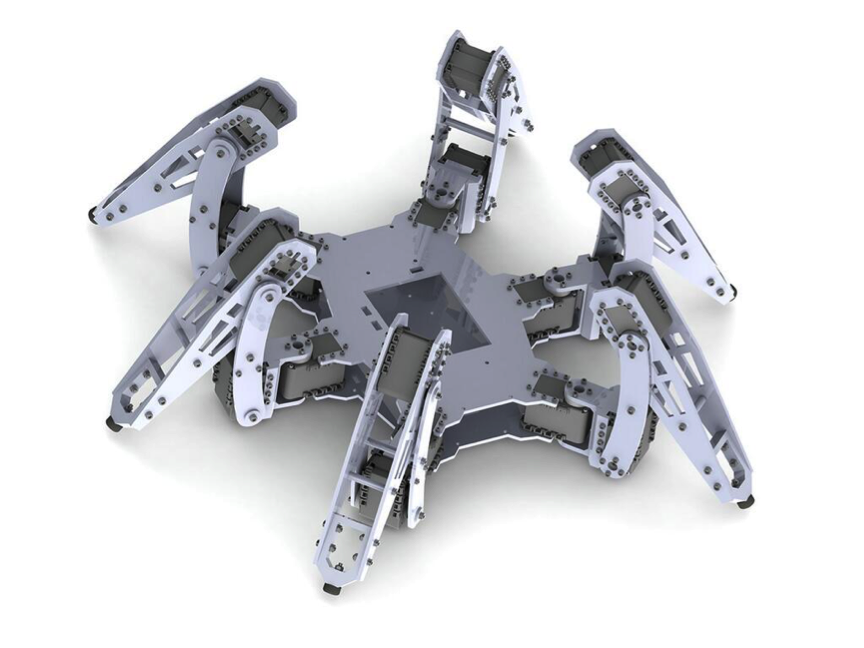
私は夏の半分をミューズを探して過ごしました。むしろ、すべての実装を再検討し、シャーシ設計に最適なソリューションを選択しようとしました。 この作品に特に感心したのは、PhantomX、A-pod、Intel Hexapodです。 PhantomXプロジェクトからインスピレーションを引き出すことが決定されました-そして、それがここから来たものです。 今後は、これで1年間ロボットから達成できたすべてのことを警告したいと思います。 しかし、プロセス自体と良い論文のボールは私にとって重要でした。
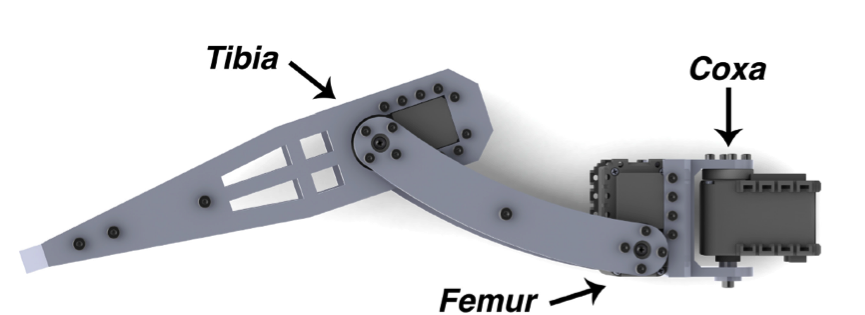
夏の終わり、3年目になる前に、私は徐々にゆるくなって、プロジェクトに関連する管理上の問題を解決し始めました。 組み込みシステムの私の講師であるトニー・ウィルコックス博士は、喜んで1年間スーパーバイザーになり、この目標の達成を支援することに同意しました。 資金調達の問題を解決する必要がありました。1個あたり26ポンドの優れたデジタルサーボワイヤ、ダイナミクセルAX-12Aに目が行き、完全な幸福に必要なのは18個だけでした。 トニー博士はこの問題を解決することを約束しました。 翌日、彼は3台のサーボドライブを注文し、1本の脚を組み立ててその性能を実証するというタスクを与えました。 雪のない英語の正月の後、私は大きな笑顔で研究室に戻りました。その時までに、私の手に足の試作品ができていたからです。
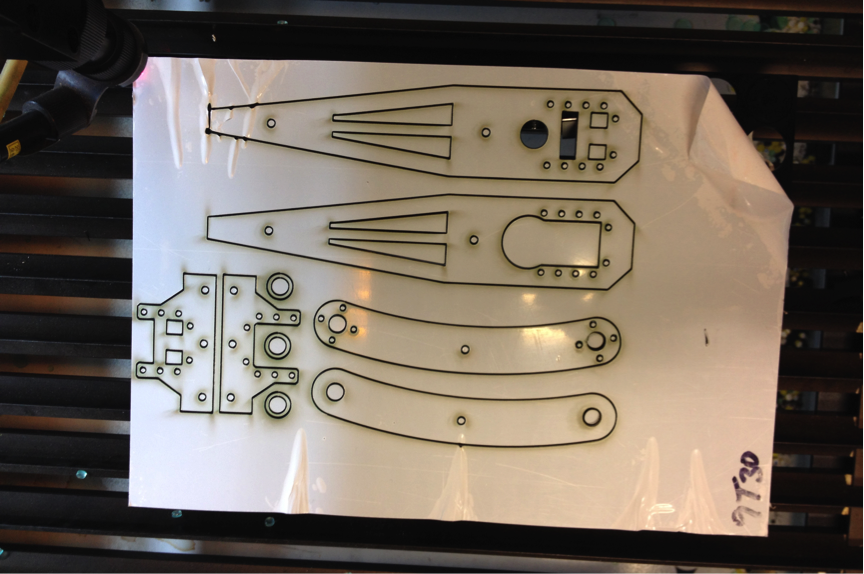
シャーシのほとんどは黒い熱可塑性プラスチックで作られており、レーザーマシンを使用して切断されています。
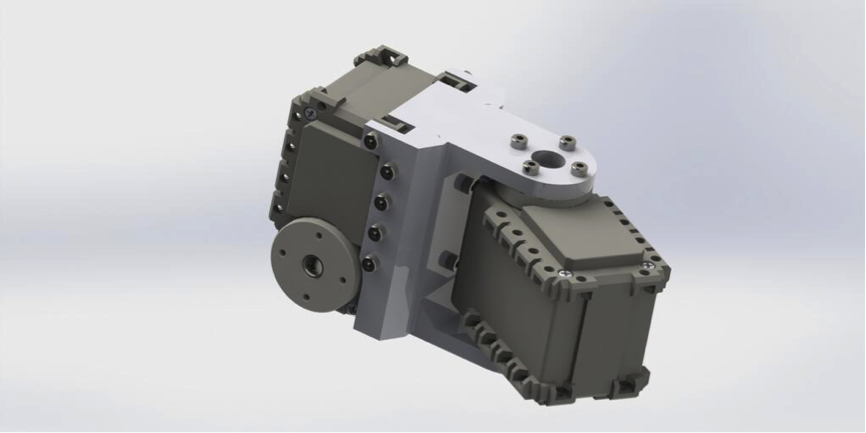
CoxaとFemurを接続するブラケットを3Dプリンターで印刷しました。
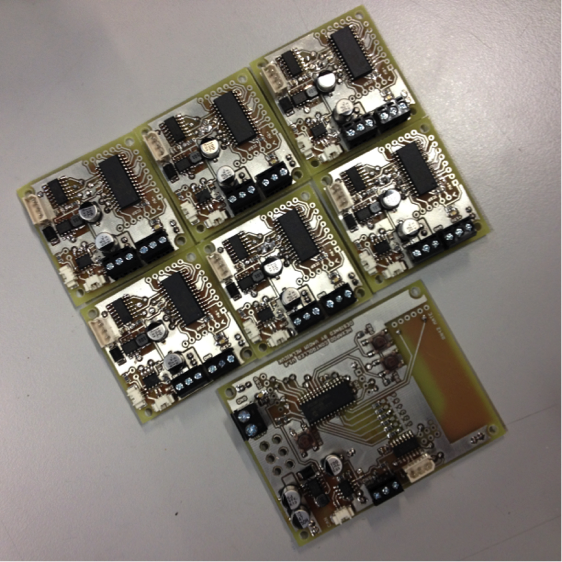
ボードのプロトタイプ。
トニーが約束したように、大学は残りの12台のモーターの面倒を見て、数日後、混乱しないように箱を開けてモーターにナンバーステッカーを貼り付けました。 ほぼ同時期に、彼は電子開発をプリント基板に移し始めました。 すべてのボードが大学の壁の中で手動で作成されたことは注目に値します。
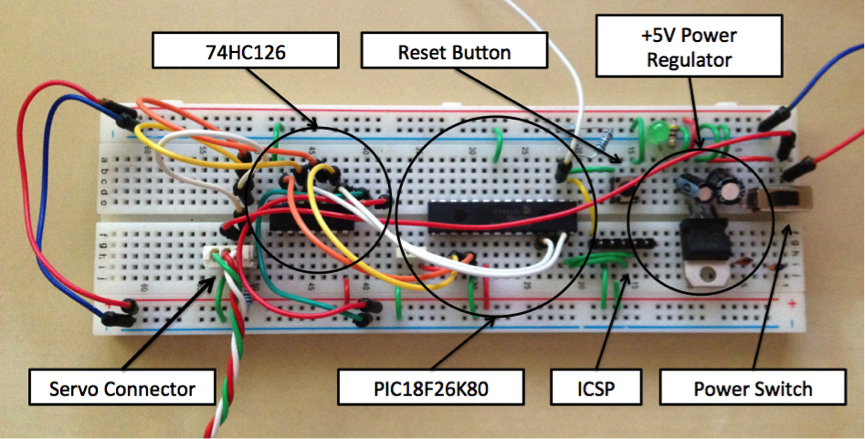
充填の説明付きチャート:
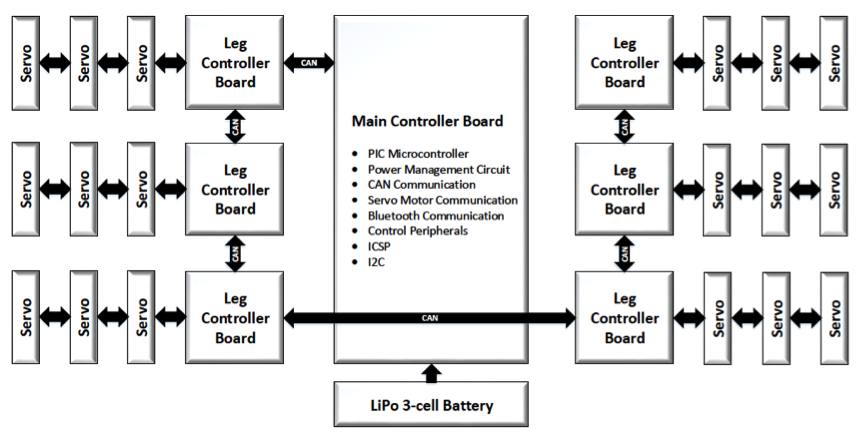
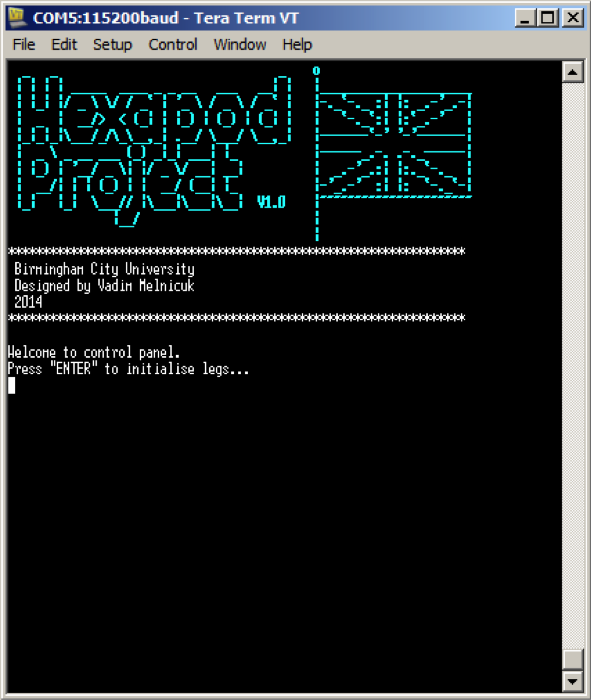
ロボットは、Bluetooth経由で端末から制御されます。
素材に関連する質問に回答させていただきます。
PS
イギリスでは、学士論文は論文と呼ばれます。
興味があれば、 githubのコードを掘り下げることができます。
Googleドライブの電子回路。
パブリックドメインにCADファイルを投稿したり、興味があればコメントを書いたりすることもできます。