著者からプロジェクトの文字通りの説明をします。
日常生活で
Engineer200によるキッチン照明制御
このプロジェクトは、スイッチの発見、旅行の忘れ、閉鎖の必要性の問題の解決を開始するように設計されています。 最初の部分は、キッチンの作業面の照明とキャビネット内の照明のスムーズな包含を実装します。たとえば、通常はシンクの下で懐中電灯で飛び込む必要があります。 キッチンの作業面を強調するには、上部キャビネットの下部にLEDストリップを配置します。 ボタンを短く押すと、ライトがオンとオフになります。 長押しすると、光のレベルを変更するモードがオンになり、徐々に減衰し、ゼロに達すると再び明るく点灯します。 ボタンを離すと、照明レベルが記憶され、ボタンをさらに短く押すと、保存されたレベルまで照明が点灯します。 キャビネット内部では、キャビネットの壁に組み込まれたリードスイッチの操作により、ライトがスムーズにオン/オフします。 さらなる開発には、プレゼンスセンサーと光センサーの接続、制御チャネルの数の増加、ガラスの棚とドアの装飾照明の実装が含まれます。
プログラムは、AFMega8A-PUコントローラーを搭載したArduino UNOでテストされ、Arduino PRO Miniに実装されました。
回路図:
FLProgプログラムのプロジェクトファイル 。
ArduinoIDEのスケッチ
bool _gtv1 = 0; bool _gtv2 = 0; int _gtv3 = 255; int _gtv4 = 0; bool _gtv9 = 0; bool _gtv11 = 1; int _gtv12 = 255; bool _gtv13 = 0; bool _gtv14 = 0; bool _gtv15 = 0; bool _gtv16 = 0; bool _gtv17 = 0; bool _gtv18 = 0; int _gtv19 = 255; int _gtv20 = 255; int _gtv21 = 255; int _gtv22 = 255; int _gtv23 = 0; int _gtv24 = 0; bool _gtv5 = 0; bool _gtv6 = 0; int _gtv8 = 0; int _gtv10 = 0; int _gtv25 = 0; bool _tim1I = 0; bool _tim1O = 0; unsigned long _tim1P = 0UL; bool _tim3I = 0; bool _tim3O = 0; unsigned long _tim3P = 0UL; bool _tim4I = 0; bool _tim4O = 0; unsigned long _tim4P = 0UL; int _swi3; bool _trgs1 = 0; int _swi5; bool _trgs2 = 0; int _swi6; bool _trgs3 = 0; bool _gen1I = 0; bool _gen1O = 0; unsigned long _gen1P = 0UL; int _swi4; bool _count1I = 0; int _count1P = 0; bool _gen3I = 0; bool _gen3O = 0; unsigned long _gen3P = 0UL; int _swi7; bool _count3I = 0; int _count3P = 0; bool _gen4I = 0; bool _gen4O = 0; unsigned long _gen4P = 0UL; int _swi8; bool _count4I = 0; int _count4P = 0; bool _gen2I = 0; bool _gen2O = 0; unsigned long _gen2P = 0UL; int _swi1; int _swi2; bool _count2I = 0; int _count2P = 0; bool _gen5I = 0; bool _gen5O = 0; unsigned long _gen5P = 0UL; int _swi9; int _swi10; bool _count5I = 0; int _count5P = 0; bool _gen6I = 0; bool _gen6O = 0; unsigned long _gen6P = 0UL; int _swi11; int _swi12; bool _count6I = 0; int _count6P = 0; bool _tim2I = 0; bool _tim2O = 0; unsigned long _tim2P = 0UL; bool _tim5I = 0; bool _tim5O = 0; unsigned long _tim5P = 0UL; bool _tim6I = 0; bool _tim6O = 0; unsigned long _tim6P = 0UL; bool _gen7I = 0; bool _gen7O = 0; unsigned long _gen7P = 0UL; int _swi13; bool _count7I = 0; int _count7P = 0; bool _gen8I = 0; bool _gen8O = 0; unsigned long _gen8P = 0UL; int _swi14; bool _count8I = 0; int _count8P = 0; bool _gen9I = 0; bool _gen9O = 0; unsigned long _gen9P = 0UL; int _swi15; bool _count9I = 0; int _count9P = 0; bool _bounseInput2S = 0; bool _bounseInput2O = 0; unsigned long _bounseInput2P = 0UL; bool _bounseInput4S = 0; bool _bounseInput4O = 0; unsigned long _bounseInput4P = 0UL; bool _bounseInput7S = 0; bool _bounseInput7O = 0; unsigned long _bounseInput7P = 0UL; bool _bounseInput13S = 0; bool _bounseInput13O = 0; unsigned long _bounseInput13P = 0UL; bool _bounseInput8S = 0; bool _bounseInput8O = 0; unsigned long _bounseInput8P = 0UL; bool _bounseInput12S = 0; bool _bounseInput12O = 0; unsigned long _bounseInput12P = 0UL; void setup() { pinMode(8, INPUT); digitalWrite(8, HIGH); pinMode(12, INPUT); digitalWrite(12, HIGH); pinMode(13, INPUT); pinMode(2, INPUT); digitalWrite(2, HIGH); pinMode(4, INPUT); digitalWrite(4, HIGH); pinMode(7, INPUT); digitalWrite(7, HIGH); _bounseInput12O = digitalRead(12); _bounseInput8O = digitalRead(8); _bounseInput2O = digitalRead(2); _bounseInput4O = digitalRead(4); _bounseInput7O = digitalRead(7); _bounseInput13O = digitalRead(13); } void loop() { bool _bounceTmp2 = (digitalRead (2)); if (_bounseInput2S) { if (millis() >= (_bounseInput2P + 40)) { _bounseInput2O = _bounceTmp2; _bounseInput2S = 0; } } else { if (_bounceTmp2 != _bounseInput2O ) { _bounseInput2S = 1; _bounseInput2P = millis(); } } bool _bounceTmp4 = (digitalRead (4)); if (_bounseInput4S) { if (millis() >= (_bounseInput4P + 40)) { _bounseInput4O = _bounceTmp4; _bounseInput4S = 0; } } else { if (_bounceTmp4 != _bounseInput4O ) { _bounseInput4S = 1; _bounseInput4P = millis(); } } bool _bounceTmp7 = (digitalRead (7)); if (_bounseInput7S) { if (millis() >= (_bounseInput7P + 40)) { _bounseInput7O = _bounceTmp7; _bounseInput7S = 0; } } else { if (_bounceTmp7 != _bounseInput7O ) { _bounseInput7S = 1; _bounseInput7P = millis(); } } bool _bounceTmp13 = (digitalRead (13)); if (_bounseInput13S) { if (millis() >= (_bounseInput13P + 40)) { _bounseInput13O = _bounceTmp13; _bounseInput13S = 0; } } else { if (_bounceTmp13 != _bounseInput13O ) { _bounseInput13S = 1; _bounseInput13P = millis(); } } bool _bounceTmp8 = (digitalRead (8)); if (_bounseInput8S) { if (millis() >= (_bounseInput8P + 40)) { _bounseInput8O = _bounceTmp8; _bounseInput8S = 0; } } else { if (_bounceTmp8 != _bounseInput8O ) { _bounseInput8S = 1; _bounseInput8P = millis(); } } bool _bounceTmp12 = (digitalRead (12)); if (_bounseInput12S) { if (millis() >= (_bounseInput12P + 40)) { _bounseInput12O = _bounceTmp12; _bounseInput12S = 0; } } else { if (_bounceTmp12 != _bounseInput12O ) { _bounseInput12S = 1; _bounseInput12P = millis(); } } if (_bounseInput8O) { _tim1O = 1; _tim1I = 1; } else { if (_tim1I) { _tim1I = 0; _tim1P = millis(); } else { if (_tim1O) { if ( _isTimer(_tim1P, 100)) _tim1O = 0; } } } if (_bounseInput12O) { _tim3O = 1; _tim3I = 1; } else { if (_tim3I) { _tim3I = 0; _tim3P = millis(); } else { if (_tim3O) { if ( _isTimer(_tim3P, 100)) _tim3O = 0; } } } if (_bounseInput13O) { _tim4O = 1; _tim4I = 1; } else { if (_tim4I) { _tim4I = 0; _tim4P = millis(); } else { if (_tim4O) { if ( _isTimer(_tim4P, 100)) _tim4O = 0; } } } _gtv11 = _tim1O; _gtv15 = _tim3O; _gtv16 = _tim4O; if ( (_gtv9) || ( ( (!(_gtv9)) && (_gtv11) && (!(_gtv1)) ) && ((_gtv3) == (0)) ) ) _trgs1 = 1; if ( ( (!(_gtv9)) && (_gtv11) && (!(_gtv1)) ) && ((_gtv3) > (0)) ) _trgs1 = 0; if (_trgs1) { _swi3 = _gtv12; } else { _swi3 = 0; } _gtv3 = _swi3; if ( (_gtv17) || ( ( (!(_gtv17)) && (_gtv15) && (!(_gtv13)) ) && ((_gtv21) == (0)) ) ) _trgs2 = 1; if ( ( (!(_gtv17)) && (_gtv15) && (!(_gtv13)) ) && ((_gtv21) > (0)) ) _trgs2 = 0; if (_trgs2) { _swi5 = _gtv19; } else { _swi5 = 0; } _gtv21 = _swi5; if ( (_gtv18) || ( ( (!(_gtv18)) && (_gtv16) && (!(_gtv14)) ) && ((_gtv22) == (0)) ) ) _trgs3 = 1; if ( ( (!(_gtv18)) && (_gtv16) && (!(_gtv14)) ) && ((_gtv22) > (0)) ) _trgs3 = 0; if (_trgs3) { _swi6 = _gtv20; } else { _swi6 = 0; } _gtv22 = _swi6; if (_gtv9) { _swi4 = 0; } else { _swi4 = 2; } if ( ((_gtv4) < (_gtv3)) || ((_gtv4) > (_gtv3)) ) { if (! _gen1I) { _gen1I = 1; _gen1O = 1; _gen1P = millis(); } } else { _gen1I = 0 ; _gen1O = 0; } if (_gen1I ) { if ( _isTimer ( _gen1P , _swi4 )) { _gen1P = millis(); _gen1O = ! _gen1O; } } if (_gen1O) { if (! _count1I) { if ( ((_gtv4) < (_gtv3)) && (!((_gtv4) > (_gtv3))) ) { _count1P = _count1P + 1; } else { _count1P = _count1P - 1; }; _count1I = 1; } } else { _count1I = 0; } if (_count1P < 0 ) _count1P = 0; if (0) _count1P = 0; analogWrite(9, _count1P); _gtv4 = _count1P; if (_gtv17) { _swi7 = 0; } else { _swi7 = 2; } if ( ((_gtv23) < (_gtv21)) || ((_gtv23) > (_gtv21)) ) { if (! _gen3I) { _gen3I = 1; _gen3O = 1; _gen3P = millis(); } } else { _gen3I = 0 ; _gen3O = 0; } if (_gen3I ) { if ( _isTimer ( _gen3P , _swi7 )) { _gen3P = millis(); _gen3O = ! _gen3O; } } if (_gen3O) { if (! _count3I) { if ( ((_gtv23) < (_gtv21)) && (!((_gtv23) > (_gtv21))) ) { _count3P = _count3P + 1; } else { _count3P = _count3P - 1; }; _count3I = 1; } } else { _count3I = 0; } if (_count3P < 0 ) _count3P = 0; if (0) _count3P = 0; analogWrite(10, _count3P); _gtv23 = _count3P; if (_gtv18) { _swi8 = 0; } else { _swi8 = 2; } if ( ((_gtv24) < (_gtv22)) || ((_gtv24) > (_gtv22)) ) { if (! _gen4I) { _gen4I = 1; _gen4O = 1; _gen4P = millis(); } } else { _gen4I = 0 ; _gen4O = 0; } if (_gen4I ) { if ( _isTimer ( _gen4P , _swi8 )) { _gen4P = millis(); _gen4O = ! _gen4O; } } if (_gen4O) { if (! _count4I) { if ( ((_gtv24) < (_gtv22)) && (!((_gtv24) > (_gtv22))) ) { _count4P = _count4P + 1; } else { _count4P = _count4P - 1; }; _count4I = 1; } } else { _count4I = 0; } if (_count4P < 0 ) _count4P = 0; if (0) _count4P = 0; _gtv24 = _count4P; analogWrite(11, _count4P); if (_gtv9) { if (! _gen2I) { _gen2I = 1; _gen2O = 1; _gen2P = millis(); } } else { _gen2I = 0 ; _gen2O = 0; } if (_gen2I ) { if ( _isTimer ( _gen2P , 7 )) { _gen2P = millis(); _gen2O = ! _gen2O; } } if (_gen2O) { if (! _count2I) { _count2P = _count2P + 1; _count2I = 1; } } else { _count2I = 0; } if (_count2P < 0 ) _count2P = 0; if (_gtv2) _count2P = 0; if (((300) - (_count2P)) > (255)) { _swi1 = 255; } else { _swi1 = (300) - (_count2P); } if (_gtv9) { _swi2 = _swi1; } else { _swi2 = _gtv12; } _gtv2 = (_count2P) >= (300); _gtv12 = _swi2; if (_gtv17) { if (! _gen5I) { _gen5I = 1; _gen5O = 1; _gen5P = millis(); } } else { _gen5I = 0 ; _gen5O = 0; } if (_gen5I ) { if ( _isTimer ( _gen5P , 7 )) { _gen5P = millis(); _gen5O = ! _gen5O; } } if (_gen5O) { if (! _count5I) { _count5P = _count5P + 1; _count5I = 1; } } else { _count5I = 0; } if (_count5P < 0 ) _count5P = 0; if (_gtv5) _count5P = 0; if (((300) - (_count5P)) > (255)) { _swi9 = 255; } else { _swi9 = (300) - (_count5P); } if (_gtv17) { _swi10 = _swi9; } else { _swi10 = _gtv19; } _gtv5 = (_count5P) >= (300); _gtv19 = _swi10; if (_gtv18) { if (! _gen6I) { _gen6I = 1; _gen6O = 1; _gen6P = millis(); } } else { _gen6I = 0 ; _gen6O = 0; } if (_gen6I ) { if ( _isTimer ( _gen6P , 7 )) { _gen6P = millis(); _gen6O = ! _gen6O; } } if (_gen6O) { if (! _count6I) { _count6P = _count6P + 1; _count6I = 1; } } else { _count6I = 0; } if (_count6P < 0 ) _count6P = 0; if (_gtv6) _count6P = 0; if (((300) - (_count6P)) > (255)) { _swi11 = 255; } else { _swi11 = (300) - (_count6P); } if (_gtv18) { _swi12 = _swi11; } else { _swi12 = _gtv20; } _gtv6 = (_count6P) >= (300); _gtv20 = _swi12; _gtv1 = _gtv11; _gtv13 = _gtv15; _gtv14 = _gtv16; if (_gtv11) { _tim2O = 1; _tim2I = 1; } else { if (_tim2I) { _tim2I = 0; _tim2P = millis(); } else { if (_tim2O) { if ( _isTimer(_tim2P, 1000)) _tim2O = 0; } } } if (_gtv15) { _tim5O = 1; _tim5I = 1; } else { if (_tim5I) { _tim5I = 0; _tim5P = millis(); } else { if (_tim5O) { if ( _isTimer(_tim5P, 1000)) _tim5O = 0; } } } if (_gtv16) { _tim6O = 1; _tim6I = 1; } else { if (_tim6I) { _tim6I = 0; _tim6P = millis(); } else { if (_tim6O) { if ( _isTimer(_tim6P, 1000)) _tim6O = 0; } } } _gtv9 = (!(_tim2O)) && (!(_gtv11)) ; _gtv17 = (!(_tim5O)) && (!(_gtv15)) ; _gtv18 = (!(_tim6O)) && (!(_gtv16)) ; if (_bounseInput2O) { _swi13 = 255; } else { _swi13 = 0; } if ( ((_gtv8) < (_swi13)) || ((_gtv8) > (_swi13)) ) { if (! _gen7I) { _gen7I = 1; _gen7O = 1; _gen7P = millis(); } } else { _gen7I = 0 ; _gen7O = 0; } if (_gen7I ) { if ( _isTimer ( _gen7P , 3 )) { _gen7P = millis(); _gen7O = ! _gen7O; } } if (_gen7O) { if (! _count7I) { if ( ((_gtv8) < (_swi13)) && (!((_gtv8) > (_swi13))) ) { _count7P = _count7P + 1; } else { _count7P = _count7P - 1; }; _count7I = 1; } } else { _count7I = 0; } if (_count7P < 0 ) _count7P = 0; if (0) _count7P = 0; analogWrite(3, _count7P); _gtv8 = _count7P; if (_bounseInput4O) { _swi14 = 255; } else { _swi14 = 0; } if ( ((_gtv10) < (_swi14)) || ((_gtv10) > (_swi14)) ) { if (! _gen8I) { _gen8I = 1; _gen8O = 1; _gen8P = millis(); } } else { _gen8I = 0 ; _gen8O = 0; } if (_gen8I ) { if ( _isTimer ( _gen8P , 3 )) { _gen8P = millis(); _gen8O = ! _gen8O; } } if (_gen8O) { if (! _count8I) { if ( ((_gtv10) < (_swi14)) && (!((_gtv10) > (_swi14))) ) { _count8P = _count8P + 1; } else { _count8P = _count8P - 1; }; _count8I = 1; } } else { _count8I = 0; } if (_count8P < 0 ) _count8P = 0; if (0) _count8P = 0; analogWrite(5, _count8P); _gtv10 = _count8P; if (_bounseInput7O) { _swi15 = 255; } else { _swi15 = 0; } if ( ((_gtv25) < (_swi15)) || ((_gtv25) > (_swi15)) ) { if (! _gen9I) { _gen9I = 1; _gen9O = 1; _gen9P = millis(); } } else { _gen9I = 0 ; _gen9O = 0; } if (_gen9I ) { if ( _isTimer ( _gen9P , 3 )) { _gen9P = millis(); _gen9O = ! _gen9O; } } if (_gen9O) { if (! _count9I) { if ( ((_gtv25) < (_swi15)) && (!((_gtv25) > (_swi15))) ) { _count9P = _count9P + 1; } else { _count9P = _count9P - 1; }; _count9I = 1; } } else { _count9I = 0; } if (_count9P < 0 ) _count9P = 0; if (0) _count9P = 0; analogWrite(6, _count9P); _gtv25 = _count9P; } bool _isTimer(unsigned long startTime, unsigned long period ) { unsigned long endTime; endTime = startTime + period; return (millis() >= endTime); }
準備ができたデバイス:
ビルドプロセスのビデオ:
最終結果のビデオ:
職場で
ALEXの溶接継手用溶接コントローラー
溶接継手用の溶接コントローラープログラムを作成しました。 補強バーの存在下でフットペダルから開始します。
3つの技術パラメーターの調整:
「クリック時間」、「溶接時間」
分岐時間
さらに、スイッチ「AUTOMATIC MANUAL」
回路図:
FLProgプログラムのプロジェクトファイル 。
ArduinoIDEのスケッチ
bool _gtv1 = 0; bool _tim1I = 0; bool _tim1O = 0; unsigned long _tim1P = 0UL; bool _gen1I = 0; bool _gen1O = 0; unsigned long _gen1P = 0UL; bool _trgr1 = 0; bool _gen2I = 0; bool _gen2O = 0; unsigned long _gen2P = 0UL; bool _tim2I = 0; bool _tim2O = 0; unsigned long _tim2P = 0UL; bool _tim3I = 0; bool _tim3O = 0; unsigned long _tim3P = 0UL; bool _gen4I = 0; bool _gen4O = 0; unsigned long _gen4P = 0UL; void setup() { pinMode(2, INPUT); pinMode(3, INPUT); pinMode(4, INPUT); pinMode(5, OUTPUT); pinMode(6, OUTPUT); } void loop() { if ( ( (digitalRead (2))) && ( (digitalRead (3))) ) { if (_tim1I) { if ( _isTimer(_tim1P, nil)) _tim1O = 1; } else { _tim1I = 1; _tim1P = millis(); } } else { _tim1O = 0; _tim1I = 0; } if (_tim1O) { if (! _gen1I) { _gen1I = 1; _gen1O = 1; _gen1P = millis(); } } else { _gen1I = 0 ; _gen1O = 0; } if (_gen1I && _gen1O) _gen1O = !( _isTimer ( _gen1P , 10 )); if ( ( ( (digitalRead (2))) && (!( (digitalRead (4)))) ) || ( ( (digitalRead (4))) && (_gtv1) ) ) { if (! _gen2I) { _gen2I = 1; _gen2O = 1; _gen2P = millis(); } } else { _gen2I = 0 ; _gen2O = 0; } if (_gen2I && _gen2O) _gen2O = !( _isTimer ( _gen2P , 10 )); if (_gen2O) _trgr1 = 0; if (_gen1O) _trgr1 = 1; if (_trgr1) { if (_tim2I) { if ( _isTimer(_tim2P, (( (analogRead (1))) / (8)) + (100))) _tim2O = 1; } else { _tim2I = 1; _tim2P = millis(); } } else { _tim2O = 0; _tim2I = 0; } if (_tim2O) { if (! _gen4I) { _gen4I = 1; _gen4O = 1; _gen4P = millis(); } } else { _gen4I = 0 ; _gen4O = 0; } if (_gen4I && _gen4O) _gen4O = !( _isTimer ( _gen4P , (( (analogRead (0))) / (8)) + (100) )); if (_gen4O) { _tim3O = 1; _tim3I = 1; } else { if (_tim3I) { _tim3I = 0; _tim3P = millis(); } else { if (_tim3O) { if ( _isTimer(_tim3P, (( (analogRead (2))) / (8)) + (100))) _tim3O = 0; } } } digitalWrite(5, _trgr1); digitalWrite(6, _gen4O); _gtv1 = (!(_tim3O)); } bool _isTimer(unsigned long startTime, unsigned long period ) { unsigned long endTime; endTime = startTime + period; return (millis() >= endTime); }
車の中で
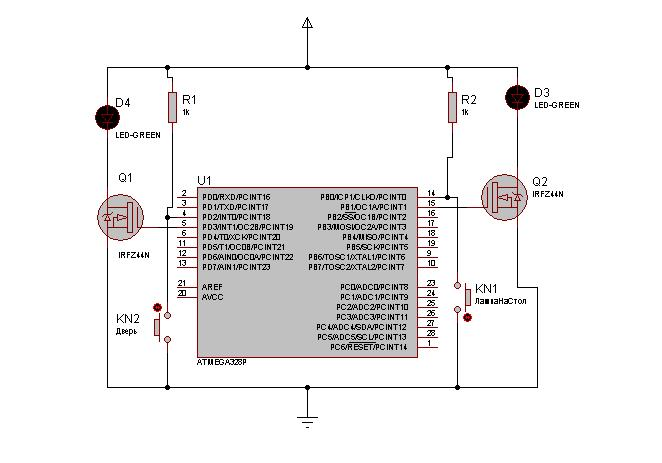
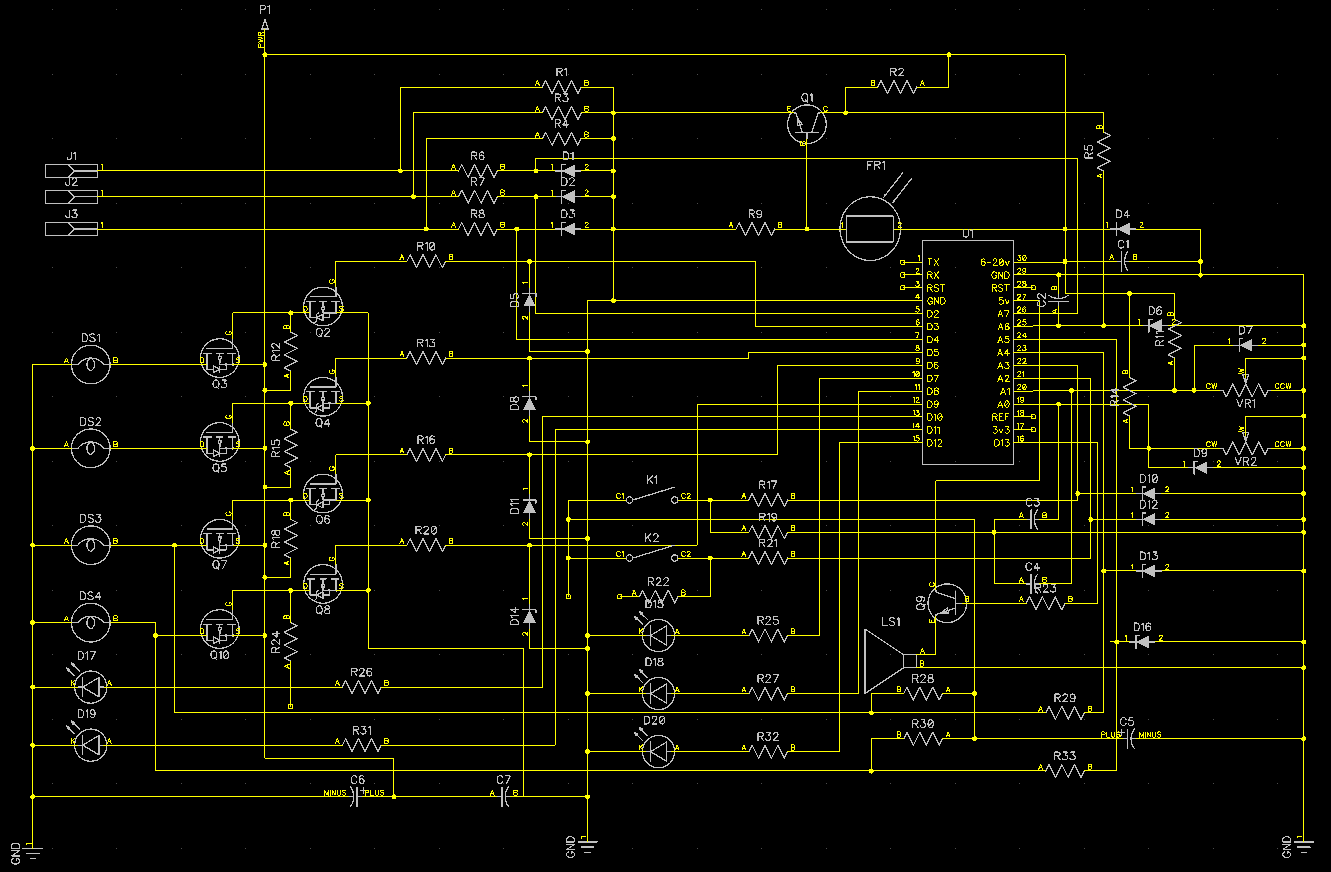
karam.dの自動車照明制御
車のライトコントロールユニット。
機械(寸法、走行灯、ロービーム)をオンにすると、自動的にオンとオフになります。 タコメータからの信号は、どのようにして自動モード、寸法、およびダイオードライト(自動オン)をオンにしましたか。 信号が消えると(10秒後)、自動モードがオフになり、イグニッションがオフになると寸法が消えます。 速度センサーからの信号が表示されると、ナビゲーションライトまたはディップされたヘッドライトが点灯します(ライトに応じて)。 それらが消える(2分後)場合は、オフになります。
ユニットの電源がオンになると、ロービームランプの完全性が監視され、ボード上の電圧(最小、通常、最大)に光と音のアラームが付きます(ボタンを押すと音信号をオフにできます)。 方向指示器を(A7に)接続すると、音声信号が伴います。 このプロジェクトはArduino Nanoで組み立てられています。 1か月間、時計のように機能しています。
回路図:
FLProgプログラムのプロジェクトファイル 。
diptraceのスキーム 。
ArduinoIDEのスケッチ
bool _gtv1 = 0; bool _gtv5 = 0; bool _gtv6 = 0; bool _gtv7 = 0; bool _gtv8 = 0; bool _gtv9 = 0; bool _gtv10 = 0; bool _gtv11 = 0; bool _gtv2 = 0; bool _gtv3 = 0; bool _gtv4 = 0; bool _gtv12 = 0; bool _gtv13 = 0; bool _gtv14 = 0; bool _bounse1S = 0; bool _bounse1O = 0; unsigned long _bounse1P = 0UL; bool _tim1I = 0; bool _tim1O = 0; unsigned long _tim1P = 0UL; bool _tim6I = 0; bool _tim6O = 0; unsigned long _tim6P = 0UL; bool _trgrt2 = 0; bool _trgrt2I = 0; bool _gen4I = 0; bool _gen4O = 0; unsigned long _gen4P = 0UL; bool _count3I = 0; int _count3P = 0; bool _tim10I = 0; bool _tim10O = 0; unsigned long _tim10P = 0UL; bool _tim9I = 0; bool _tim9O = 0; unsigned long _tim9P = 0UL; bool _tim2I = 0; bool _tim2O = 0; unsigned long _tim2P = 0UL; bool _trgrt1 = 0; bool _trgrt1I = 0; bool _tim8I = 0; bool _tim8O = 0; unsigned long _tim8P = 0UL; bool _gen2I = 0; bool _gen2O = 0; unsigned long _gen2P = 0UL; bool _count1I = 0; int _count1P = 0; bool _tim3I = 0; bool _tim3O = 0; unsigned long _tim3P = 0UL; bool _gen3I = 0; bool _gen3O = 0; unsigned long _gen3P = 0UL; bool _count2I = 0; int _count2P = 0; bool _tim4I = 0; bool _tim4O = 0; unsigned long _tim4P = 0UL; bool _tim5I = 0; bool _tim5O = 0; unsigned long _tim5P = 0UL; bool _tim7I = 0; bool _tim7O = 0; unsigned long _tim7P = 0UL; bool _gen1I = 0; bool _gen1O = 0; unsigned long _gen1P = 0UL; bool _bounse3S = 0; bool _bounse3O = 0; unsigned long _bounse3P = 0UL; bool _bounse2S = 0; bool _bounse2O = 0; unsigned long _bounse2P = 0UL; bool _trgt1 = 0; bool _trgt1I = 0; void setup() { pinMode(2, INPUT); pinMode(4, INPUT); pinMode(7, OUTPUT); pinMode(12, OUTPUT); pinMode(8, OUTPUT); pinMode(13, OUTPUT); pinMode(10, OUTPUT); pinMode(11, OUTPUT); } void loop() { bool _bounceTmp1 = ( (analogRead (2))) > (500); if (_bounse1S) { if (millis() >= (_bounse1P + 40)) { _bounse1O = _bounceTmp1; _bounse1S = 0; } } else { if (_bounceTmp1 != _bounse1O ) { _bounse1S = 1; _bounse1P = millis(); } } _gtv1 = _bounse1O; if ( (digitalRead (2))) { if (_trgrt2I) { _trgrt2 = 0; } else { _trgrt2 = 1; _trgrt2I = 1; } } else { _trgrt2 = 0; _trgrt2I = 0; }; if (_trgrt2) { _tim1O = 1; _tim1I = 1; } else { if (_tim1I) { _tim1I = 0; _tim1P = millis(); } else { if (_tim1O) { if ( _isTimer(_tim1P, 10000)) _tim1O = 0; } } } if ( (!(_gtv1)) && (_tim1O) ) { if (_tim6I) { if ( _isTimer(_tim6P, 3000)) _tim6O = 1; } else { _tim6I = 1; _tim6P = millis(); } } else { _tim6O = 0; _tim6I = 0; } if ( (_tim6O) ^ (_gtv14) ) { if (! _gen4I) { _gen4I = 1; _gen4O = 1; _gen4P = millis(); } } else { _gen4I = 0 ; _gen4O = 0; } if (_gen4I ) { if ( _isTimer ( _gen4P , 1 )) { _gen4P = millis(); _gen4O = ! _gen4O; } } if (_gen4O) { if (! _count3I) { _count3P = _count3P + 1; _count3I = 1; } } else { _count3I = 0; } if (_count3P < 0 ) _count3P = 0; _gtv5 = _tim6O; digitalWrite(7, _tim6O); _gtv14 = _count3P >= 920; if (_tim6O) { analogWrite(3, (map((_count3P), (0), (1023), (0), (254)))); } if ( (_gtv5) && (( (analogRead (5))) > (500)) ) { if (_tim10I) { if ( _isTimer(_tim10P, 2005)) _tim10O = 1; } else { _tim10I = 1; _tim10P = millis(); } } else { _tim10O = 0; _tim10I = 0; } digitalWrite(8, _tim10O); _gtv11 = _tim10O; if ( (_gtv5) && (( (analogRead (4))) > (500)) ) { if (_tim9I) { if ( _isTimer(_tim9P, 2005)) _tim9O = 1; } else { _tim9I = 1; _tim9P = millis(); } } else { _tim9O = 0; _tim9I = 0; } _gtv10 = _tim9O; digitalWrite(12, _tim9O); if ( (digitalRead (4))) { if (_trgrt1I) { _trgrt1 = 0; } else { _trgrt1 = 1; _trgrt1I = 1; } } else { _trgrt1 = 0; _trgrt1I = 0; }; if (_trgrt1) { _tim2O = 1; _tim2I = 1; } else { if (_tim2I) { _tim2I = 0; _tim2P = millis(); } else { if (_tim2O) { if ( _isTimer(_tim2P, 120000)) _tim2O = 0; } } } if ( (_gtv5) && (_tim2O) ) { if (_tim8I) { if ( _isTimer(_tim8P, 2000)) _tim8O = 1; } else { _tim8I = 1; _tim8P = millis(); } } else { _tim8O = 0; _tim8I = 0; } if ( (_tim8O) && (!(_gtv3)) && (!(_gtv4)) ) { if (! _gen2I) { _gen2I = 1; _gen2O = 1; _gen2P = millis(); } } else { _gen2I = 0 ; _gen2O = 0; } if (_gen2I ) { if ( _isTimer ( _gen2P , 1 )) { _gen2P = millis(); _gen2O = ! _gen2O; } } if (_gen2O) { if (! _count1I) { _count1P = _count1P + 1; _count1I = 1; } } else { _count1I = 0; } if (_count1P < 0 ) _count1P = 0; if (_gtv3) _count1P = 0; _gtv6 = _tim8O; _gtv4 = _count1P >= 920; analogWrite(5, (map((_count1P), (0), (1023), (0), (254)))); if (( (analogRead (6))) > (700)) { _tim3O = 1; _tim3I = 1; } else { if (_tim3I) { _tim3I = 0; _tim3P = millis(); } else { if (_tim3O) { if ( _isTimer(_tim3P, 120000)) _tim3O = 0; } } } if ( ( (_tim3O) && (_gtv5) && (_gtv6) ) ^ (_gtv12) ) { if (! _gen3I) { _gen3I = 1; _gen3O = 1; _gen3P = millis(); } } else { _gen3I = 0 ; _gen3O = 0; } if (_gen3I ) { if ( _isTimer ( _gen3P , 1 )) { _gen3P = millis(); _gen3O = ! _gen3O; } } if (_gen3O) { if (! _count2I) { _count2P = _count2P + 1; _count2I = 1; } } else { _count2I = 0; } if (_count2P < 0 ) _count2P = 0; if (!(_gtv13)) _count2P = 0; _gtv13 = _tim3O; _gtv3 = (_tim3O) && (_gtv5) && (_gtv6) ; _gtv12 = _count2P >= 920; analogWrite(9, (map((_count2P), (0), (1023), (0), (254)))); analogWrite(6, (map((_count2P), (0), (1023), (0), (254)))); if (( (analogRead (0))) > (600.00)) { if (_tim4I) { if ( _isTimer(_tim4P, 4000)) _tim4O = 1; } else { _tim4I = 1; _tim4P = millis(); } } else { _tim4O = 0; _tim4I = 0; } if (( (analogRead (1))) < (500.00)) { if (_tim5I) { if ( _isTimer(_tim5P, 4000)) _tim5O = 1; } else { _tim5I = 1; _tim5P = millis(); } } else { _tim5O = 0; _tim5I = 0; } _gtv8 = _tim4O; _gtv7 = _tim5O; digitalWrite(10, (_gtv8) || (_gtv7) ); _gtv9 = (! (_gtv8) || (0) ); digitalWrite(11, (_gtv7) || (_gtv9) ); if ( ( (_gtv8) || (_gtv7) || (_gtv10) || (_gtv11) ) ^ ( ( (_gtv8) || (_gtv7) || (_gtv10) || (_gtv11) ) && (_gtv2) ) ) { if (_tim7I) { if ( _isTimer(_tim7P, 2000)) _tim7O = 1; } else { _tim7I = 1; _tim7P = millis(); } } else { _tim7O = 0; _tim7I = 0; } if (_tim7O) { if (! _gen1I) { _gen1I = 1; _gen1O = 1; _gen1P = millis(); } } else { _gen1I = 0 ; _gen1O = 0; } if (_gen1I ) { if ( _isTimer ( _gen1P , 1000 )) { _gen1P = millis(); _gen1O = ! _gen1O; } } bool _bounceTmp3 = ( (analogRead (7))) > (500); if (_bounse3S) { if (millis() >= (_bounse3P + 40)) { _bounse3O = _bounceTmp3; _bounse3S = 0; } } else { if (_bounceTmp3 != _bounse3O ) { _bounse3S = 1; _bounse3P = millis(); } } digitalWrite(13, (_gen1O) || (_bounse3O) ); bool _bounceTmp2 = ( (analogRead (3))) > (500); if (_bounse2S) { if (millis() >= (_bounse2P + 40)) { _bounse2O = _bounceTmp2; _bounse2S = 0; } } else { if (_bounceTmp2 != _bounse2O ) { _bounse2S = 1; _bounse2P = millis(); } } bool _tmp1 = _bounse2O; if (_tmp1) { if (! _trgt1I) _trgt1 = ! _trgt1; } _trgt1I = _tmp1; _gtv2 = _trgt1; } bool _isTimer(unsigned long startTime, unsigned long period ) { unsigned long endTime; endTime = startTime + period; return (millis() >= endTime); }
すぐに予約します。 Arduino IDEのスケッチの可読性について多くの人が疑問を持っているでしょう。 スケッチは、グラフィカルプログラミング環境を使用してプログラムによって自動的に作成されます。 私が言ったように、プロジェクトの作者はITやプログラミングとは何の関係もありません。 これらは、真っ直ぐな腕と彼らが必要なものを明確に理解している賢く経済的な人々です。
現在、私が知っている開発中のプロジェクトがいくつかあります。 これは、温室の灌漑の管理、ガレージのドア、コンビネーションロックなどの多くのプロジェクトの管理です。 読者が興味を持っている場合は、著者に完成後にプロジェクトについて話すように依頼します。