1.数学的アルゴリズムに対するニューラルシステムの比較と利点
誰もがニューロンとは何かを知っています。 多かれ少なかれニューラルネットワークに精通しています。 誰もが人工神経回路網とは何かを知っている、少なくとも彼らはそれについて聞いたことがある。 タスクを非常に表面的なものに設定しました。この出版物では、ロボット工学でニューラルネットワークを使用する可能性と、他の論理システムに対するそれらの利点を示しています。 人工ニューラルネットワークは、生物が持つ自然なニューラルネットワークの原理に基づいて構築されていることを思い出してください。 昆虫、鳥、魚、または知的発達のより高い位置にいる動物である可能性があります。 たとえば、猿や人のように。 それらはすべて1つに結合されており、ニューラルネットワークです。 誰かにとって、それはより開発され、より複雑です。 誰かが原始的な形であり、「刺激反応」の原理で動作します。 ところで、人間のような非常に知的な動物は、日常生活の中で非常に頻繁に「刺激反応」の原理に基づいて行動します。 私たちが手を燃やしているなら、考えずに鋭く引っ張ります。 これを行うために多くの心は必要ありません。 しかし、「インテリジェンス」という言葉が意味するものを適用したい場合があります。 そして、それは何ですか、誰も知りません。 インテリジェンスを説明するいくつかの文言があります。 しかし、ロボット工学にとっては、これは抽象化であり、そこからゼロが有用であり、「インテリジェントな」ロボットを構築することはできません。
ロボット工学にニューラルネットワークを適用することは明らかなようです。 私たちを取り巻く生きている性質を見ると、多くの場合、最も単純なニューラルネットワークさえも備えた生物が、現代のコンピューターでは不可能なタスクを実行できることは驚くべきことです。 しかし、論理システムに対するニューラルシステムの利点は本当に明白ですか? ニューラルネットワークは何を知っており、論理システムは何を知らないのですか? ロボットエンジニアには、彼と彼のロボットまたはロボットシステムが受け取るものを知る権利があり、これはニューラルネットワークによって制御されます。 私が論理システムと言うとき、私は入ってくる情報を処理するための他のすべての数学的アルゴリズムを意味します。 結局、ニューラルネットワークもアルゴリズムです。
実際、特定のテスト、またはニューラルシステムと論理システムの比較が行われるテストを考案することは非常に困難でした。 つまり、他のアルゴリズムに対するニューラルネットワークの利点が明確に示されているテストです。 そして、あなたは知っている、それはそれほど単純ではないことが判明しました。 明らかな疑問は、システムをどの基準または指標で比較するかということでした。 最も簡単な方法は、異なるニューラルネットワークを比較することです。 実際、ネットワーク内のニューロンの総数、各層のニューロン数、またはニューラルネットワークの合計層数などの指標によって比較できます。 これらは直接配信ネットワーク、またはフィードバックネットワークなどです。 さて、ニューラルネットワークと論理システムを比較する方法は?..つまり、2つのアルゴリズムを比較する方法は? 間接的な記号を使用してニューラルネットワークと論理システムを比較する方がより効率的であることがわかりました。 「効率」や「労働集約度」などの指標の助けを借りて。 ロボットを構築する際のロボット工学にとって、費用対効果は重要な要素です。 ロボットが高すぎる場合、誰もそれを購入しません。 将来、これら2つのパラメーターのシステムを比較するために、ロボット車にインストールしたGoogleのシステムを繰り返し使用します。 強力な高度なシステム。 これが比較に必要なものです。 グーグルは最も強力で高価な技術を持っているように見えますが、雨や雪が降るとオートパイロットは運転できません。 はい、はい、これは誰かが知らなかった場合にまさに当てはまります。 各テクノロジーには長所と短所があります。 Googleのテクノロジーにはマイナス面があります。 他のロボットと同様に、Googleオートパイロットも環境で作業するためにロボットに関する情報を受信する必要があるロボットです。 このために、センサーとセンサーが使用されます。
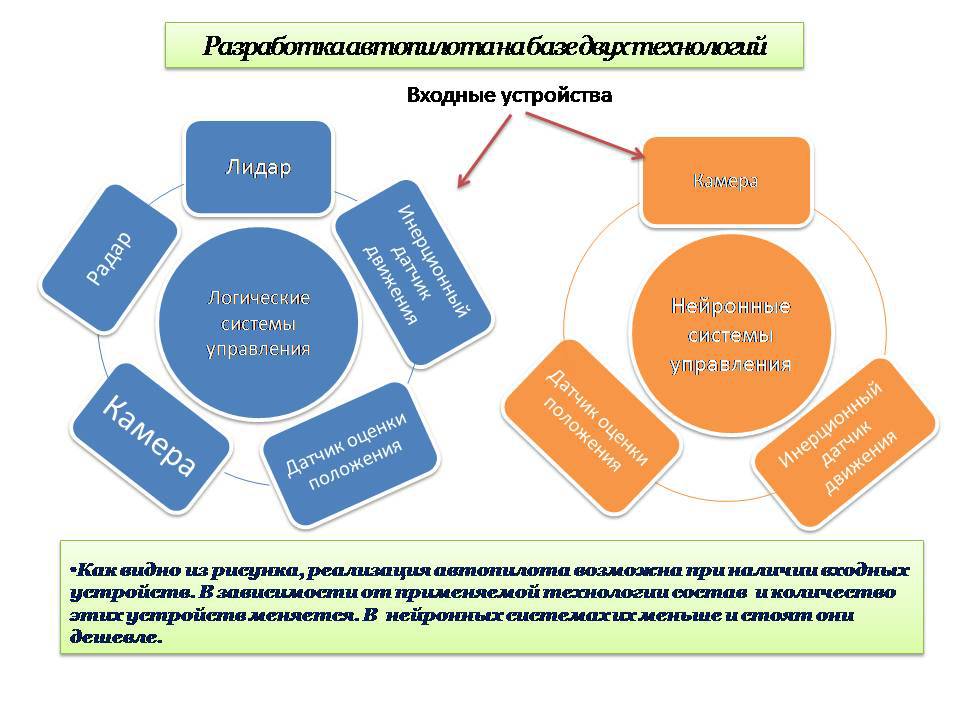
この図では、オートパイロットがその機能を実行していることがわかります。入力デバイスまたはセンサーが必要です。 図では2つのシステムが比較されています。1つはニューラルシステム上に構築され、もう1つはGoogleなどの論理システム上に構築されています。 各システムの中心には、これらのセンサーから情報を受け取る処理ユニット、または人工の「頭脳」があります。 非常に重要なポイント。 センサーの1つを削除すると、システムはそのタスクを効率的かつ安全に実行できなくなります。 GoogleのオートパイロットがLIDARを失うと、システムは周囲の空間の3Dモデルを構築できなくなります。つまり、この空間でナビゲートする機能が失われます。 ポジショニングシステムを削除すると、オートパイロットは座標内のどの位置にあるかを判断できなくなり、執行機関に制御信号を送信するのは正しくありません。 その結果、事故や人命の損失につながる可能性があります。 したがって、各システムのこのセンサーのセットは最小限で必要です。
注意してください。 Googleの社員が使用するシステムには、より多くのセンサーが搭載されています。 すでに述べたように、システムがタスクを実行し、車を効果的に制御するためには、このような数のセンサーが最低限必要です。 つまり、Googleシステムはすでに必要なセンサーのセットが小さいこのニューラルシステムよりも高価です。 Googleが使用するセンサーは、このシステムにインストールされているセンサーよりも安いと言えますか? 残念ながら、そうではありません。 それどころか、Googleのセンサーは、ニューラルネットワークで使用されるセンサーよりも何倍も高価です。 1つのLIDARの費用は3万ドルです。 これは、測位システムのセンサーにも適用されます。 これは普通の車で使用される普通のセンサーではありません。 この位置決めシステムは最も正確であるため、より高価です。 私たちのシステムでは、ドライバーが使用する従来の位置決めセンサーを使用することができます。
提示されたデータに基づいて、中間的な結論を下すことができます。 ロボットを制御するロボットにニューラルネットワークをインストールすると、1つまたは複数のタスクを実行するために必要なセンサーが少なくなり、これらのセンサーのコストが安くなります。 場合によっては、何倍も安くなります。 これは、ニューラルネットワークを備えた自動操縦の例で見ることができます。この場合、LIDARと高精度の位置決めシステムを使用する必要はありません。
ニューラルネットワークを確立すると、費用対効果が高くなります。 さらに、論理システムでは不可能なタスクを実行します。 私が言ったように、グーグルの自動操縦は雨や雪の中でどのように制御するかを知りません。
コールは、Googleの社員が使用するシステムについて話しましたが、このシステムが単位時間あたりどのくらいの情報を操作しているかを尋ねたいと思います。 誰もが知っていますか カメラ、レーダー、LIDAR、位置センサー、加速度センサーからのデータは1秒ごとにオートパイロットシステムユニットで受信されます。 Googleの場合、この数値は1 GB /秒です。 毎秒、自動操縦は1 GBの情報を処理します。 比較のために、一般的なスマートフォンユーザーは1か月あたり3〜4 GBのデータを消費します。 確かに、人間の脳は多くの情報で動作します。 おそらく多くの人にとって、目を通して受け取る情報の量がGoogleからの自動操縦よりも22倍少ないと言えば、発見になるでしょう。 22回想像してください。 毎秒、0.04 GBが私たちのビジョンに基づいています。 これは、人が外の世界から受け取るすべての情報の90%です。 残りの着信情報は、ヒアリング、タッチ、チャームに分散されます。 強力なコンピューターでもできない機能やタスクを実行するには、この量のデータで十分な人がいると想像できます。 車を運転するタスクを完了するには、Googleの自動操縦装置が1秒ごとに外界からの1 GBのデータを処理する必要があることがわかりました。 同時に、人間の脳が車を運転するのと同じタスクを実行するには、1秒あたり0.04 GB(45 MB)で十分です。 これは驚くべき事実であり、力の問題だけではないことを示しています。 そして、最小の情報を使用して最大のタスクを実行するシステムの能力において。
これらの数値を比較した後、人のIQを決定するための有名なテストに似たテストを開発するというアイデアを思いつきました。 このテストのみが、人工アルゴリズムの「インテリジェンス」のレベルを決定します。 知能レベルの決定は、コンピューターの能力ではなく、最小限の入力情報を使用して特定の機能またはタスクを実行するシステムの能力によって決定されます。 上で述べたように、個々のシステムごとにいくつかのタスクを実行するには、情報センサーを通過するために必要な最小値が必要です。 入力情報が必要な最小値よりも少ない場合、ロボットシステムはそれに割り当てられたタスクを実行できません。 そして、タスクを完了するために最小限の情報を必要とするシステムは、最も「よりインテリジェント」またはよりスマートと見なされます。
私が思うに、ロボット工学の次の重要な要因は、インテリジェントロボットを迅速に作成および開発できることです。 開発者がロボットを作成するために必要な作業と時間を見てみましょう。 より正確には、ロボット自体ではなく、このロボットを制御するアルゴリズムです。 2つのシステム間で再度ベンチマークを行います。 ロボット工学には、ロボットを構築するタスクがあります。 再びオートパイロットを使用して、道路を認識し、これらの道路に沿って車を運転してみましょう。

しかし、道路は異なります。 画像認識のアルゴリズムを作成するという観点から、最も簡単な方法を見てみましょう。 この道路は左上隅にあります。 路盤の間にははっきりとしたコントラストがあり、暗く、ほとんど黒で、縞模様があり、明るい白です。 小学生でさえ、ロボットがこの道路に沿って車を運転するアルゴリズムを書くことができます。
これらの写真は、異なる道路と道を示しています。 これらの道路の相互の違いは、道路が背景と融合するほど、たとえば次のように道路が通過する地形であるということです。ほとんど目立たない道路、右下隅の写真、ロボット工学やプログラマにとってはより困難ですロボットがこの道路を認識するアルゴリズムを作成します。 さらに、私が言ったように、多くの異なる道路があります。 そして、残念なことに、数学的方法による認識の問題には、普遍的な解決策はありません。 そのため、画像認識のための次のアルゴリズムを作成する際にプログラマから膨大な量の作業が必要になります。 しかし、大規模なチームの作業が必要な、さらに複雑なタスクもあります。 そして、これらのタスクは少数のロボット工学グループでは利用できません。 たとえば、オブジェクトの認識およびそれらを使用した操作に関連するタスク。

上の図を見ると、ロボットエンジニアが画像認識の数学的手法を使用している場合、プログラマは認識されたオブジェクトの機能を選択することができます。 これは最も重要で必要なタスクです-オブジェクトを認識すること。 この手順がないと、ロボットはそれに割り当てられたタスクを実行できません。 ロボットがオブジェクトを認識できるように、プログラマはプログラミング中に認識されたオブジェクトの機能を強調する必要があります。 したがって、時間のかかるプロセスであり、特定の知識を必要とする画像処理と認識の数学的方法を除外すると、認識されたオブジェクトの特徴を選択するのはニューラルネットワークになります。
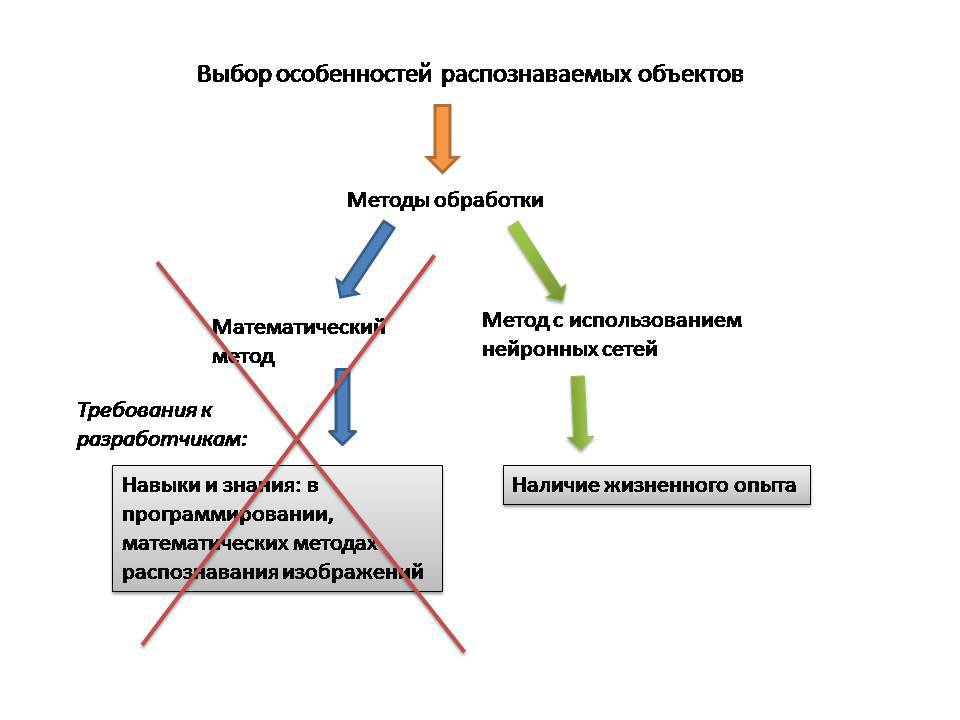
したがって、画像処理の面倒な方法が排除され、ロボット工学のタスクが最大限に促進されます。 ロボット工学には、神経系を訓練するための人生経験が必要です。 誰もが洗濯機で物を洗うことを信頼する方が良いことを知っています。それは手洗いよりも速くて簡単です。 ニューラルネットワークのトレーニング方法を習得すると、同じことがわかります。
2.ニューラルネットワークの概要
ニューラルシステムと論理システムを比較すると、ニューラルシステムの利点が明らかになりました。 ニューラルシステムは低コストの面でも勝ち、強力でインテリジェントなロボットを開発する時間を大幅に短縮します。 これで、1人のユーザーが、以前は大規模なチームと研究所でしか利用できなかったものにアクセスできます。 それでは、なぜニューラルシステムに基づいたロボット制御システムが普及していないのでしょうか? そのようなシステムの作業は、なぜ大企業や機関のみが行うのですか?
実際には、深刻なタスクを実行する多かれ少なかれ深刻なニューラルネットワークを開発するには、大規模な大学チームまたは有能なロボットチームの作業が必要です。 誰かがニューラルネットワークの開発とトレーニングを試みた場合、ロボットエンジニアは常に多くのあいまいで具体的な問題を解決する必要に直面していることを知っています。 例:ニューラルネットワークで使用するレイヤーの数、各レイヤーで使用するニューロンの数、レイヤー間で確立する必要がある接続、重みの決定方法 時間といくつかの質問をして、関連する教科書で簡単な答えを見つけることができます。 いくつかの質問に対する明白で明確な答えはありません。 結果として、ロボティクスは、論争の的となる質問への答えを見つけるために、神経回路網を用いた骨の折れる難しい実験的な作業を必要とします。 はい、ニューラルネットワークの助けを借りて、時間のかかる画像処理と認識の数学的方法は排除されますが、一方で、ロボット工学は大学チームのレベルにあるニューラルネットワークの構造を開発するタスクの複雑さに直面しています。 この悪循環を断ち切るには? ロボット工学でニューラルネットワークを使用可能にする方法
3.ゴーディアンノット
自動車愛好家が車を購入するとき、彼はギアボックスと車のエンジンの間で使用されるギア比について考えません。 さらに、彼は自動車のギアカップリングで使用される鋼の化学組成に興味がありません。 多くはこれを知りません。 これは知る必要はありません。 これは運転者の責任ではありません。 したがって、ロボット工学のエンジニアは、ニューラルネットワークの開発の問題やタスクに直面するべきではありません。 彼は、各層で使用するニューロンの数や、ニューラルネットワークで使用する層の数について考えるべきではありません。 これはロボット工学の責任ではありません。 専門家はそのような問題に対処する必要があります。
個々のプログラマー、またはプログラマーの小グループが競争力のあるニューラルネットワークを開発する可能性について意見を述べますが、おそらく失望するでしょう。 誰もチャールズ・ダーウィンを知っていて、種の起源に関する彼の著作に精通していますか? 誰かが学者のパブロフの仕事に出くわしました。 誰もが彼の講義を読んだことがありますか? これは同じパブロフであり、その犬は、発達した条件反射により日焼けした電球で唾を吐きました。 おそらく誰かがUkhtomskyのThe Doctrine of the Dominantを読んだか、Pyotr Anokhinの理論的機能システムに精通しているでしょう。 残念ながら、神経生理学と神経生物学の適切な知識がなければ、多かれ少なかれまともな神経システムを構築することは不可能です。 動揺しないでください。ロボティクスのシェアは、ニューラルネットワークのトレーニングにおける優れた教訓です。 そして、ロボット工学さえもではなく、すべてのユーザーがトレーニングにアクセスできるようにするには、ニューラルロボットをトレーニングするためのわかりやすくシンプルなインターフェイスが必要です。

ニューラルシステムをトレーニングするこの方法は、無線制御モデルを制御する方法とまったく異なるものであってはなりません。 すべてが同じでなければなりません。 同じインターフェース、同じ動き。 インターフェースは、ラジコンモデルで使用可能なものと同じ動きのセットでなければなりません。 すべてがシンプルで便利で、それ以上のものではないはずです。 明確にするために、私はこの作品をここに持っていきたい。

このインターフェイスはコンピューターにインストールされます。 機械が移動する道路の画像は、機械に取り付けられたカメラを通じて読み込まれます。 これが機械ではなく、たとえば、技術的なビジョンを備えたマニピュレーター(カメラ)である場合、操作が実行される対象の写真が読み込まれます。 ここでは、マシンが直進する道路との関係を示しています。 インターフェイスの左下隅には、それぞれのエンジンに制御信号を設定するように設計された2つのセルが描かれています。 各セルは特定のエンジンを担当します。 マシンがこの道路に沿ってまっすぐ進むと、これら2つのセルの信号はゼロになります。 他の信号を設定できます。 たとえば、ゼロの代わりに、各セルに1を設定します。 数字3.5(3年半)に賭けることができます。 主なことは、各セルで数値が同じであることです。
これは、ニューラルネットワークをトレーニングする他の方法と比較したときに、これらのネットワークのトレーニングが存在する可能性があることを明確に示す例の1つです。これは、私が説明したものよりも遅いニューラルネットワーク学習インターフェイスです。ただし、この道路に沿って車を運転する方法を学習するには数分で十分です。そのため、特定のスキルがあれば、ロボットエンジニアはこのインターフェースでも1日に数十回の操作を行うことができます。私の意見では、このようなシンプルで直感的なインターフェイスをニューラルロボットの迅速なトレーニングのために市場に導入することで、ニューラルシステムはロボット工学などの有望な分野で大きなシェアを占めるでしょう。私には明らかなようです。