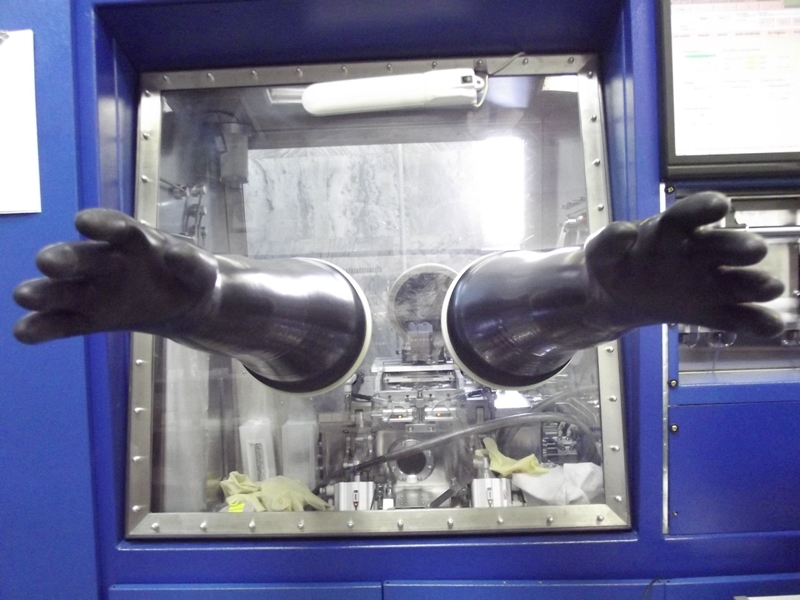
設備は、サファイア基板上の有機金属化合物から元素が堆積する高温水冷チャンバーです。 成長は摂氏550〜1000度の温度と大気圧で行われます。 このようにして得られた半導体は、信頼性と高効率性を備えているため、宇宙技術で使用できます。
インストール全体は、TwinCATを搭載したWindowsを実行するコンピューターによって制御されます。 したがって、Beckhoffが製造するすべての主要な電気部品は、上記のソフトウェアによってインストールが制御されます。 ところで、夏の暑さの中、彼らの電子機器は室温に非常に敏感であり、信号は多くのノイズを発し始めることが判明しました。
制御回路の主要な要素の1つは、誘導性要素を備えた高周波発生器です。

内部では、このチューブは中空で銀でコーティングされているため、クーラントを通過するときに酸化しません。 インダクタ回路に含まれるジェネレーターに制御信号を直接送信します。 トリッキーな方法で、ジェネレーターはインダクター回路のパラメーターと信号の周波数を調整し、誘導性要素の電流を最小化し、レシーバー側のフーコー電流を最大化します。
レシーバーはグラファイト基板ホルダーで、半導体を成長させるためのサファイア基板用の穴が3つあります。 サファイアは、成長した材料が同様の結晶格子構造を採用するために必要です。 これにより、必要な構造を持つ材料を得ることができますが、温度が変化して成長が起こると、構造が不均一になり、寿命が短くなります。 また、大幅な温度変動により、グラファイトが破壊されます。 基板ホルダーの長期動作の痕跡は、写真ではっきりと見えます。

温度は、光高温計を使用して1度単位で測定されます。A/ Dコンバータのノイズは0.2度です。 したがって、タスクは定式化されました:偏差振幅モジュールが1度に等しい定常状態で、所定の設置の温度を維持する際に可能な限り最高の精度を確保するため。 次のタスクは、移行プロセスの時間を最小限に抑え、動作温度に達したときにオーバーシュートすることでした。
まず、反応器の温度モデルの数学的記述が得られ、その後、そのパラメーターが特定されました。 測定ポイントでのプロセスを説明する微分方程式は次のとおりです。

ここで、Tは測定温度、Pはインダクターの制御電力、Bは制御動作下の係数、A1は放射エネルギー分布を特徴付ける係数、A2は対流を特徴付ける係数、Cは環境からの測定点の加熱速度です。 実験中、係数A1は主にレシーバー(基板ホルダー)の材料の種類に依存し、A2は温度の上昇とライナー(化学反応ゾーンを限定する石英ケーシング)の化学物質のパージ速度とともに増加することがわかりました。 パラメータA1およびCの定性的な識別結果を得るには、反応器の入口と出口でガスの温度を測定する必要があり、ライナーの温度を知っておくと便利です。 しかし、これは将来の計画に残ります。
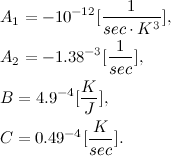
次に、極値モードに対して2つの数学モデルが取得されました。 最後の投稿で最小二乗法で特定されたパラメーターは、予測誤差を最小化する方法で修正する必要がありました;作業範囲の最低温度と最高温度に対して2セットのパラメーターが得られました。
550度の場合:
| 1000度の場合:
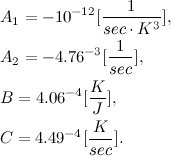
|
パラメーター値のすべての変更は、本質的に物理的です。 特に、グラファイトの温度が上昇すると、その電磁特性が変化します。 電磁エネルギーの熱への変換効率が17%低下します。 残りの係数自体は温度に依存します。
得られたモデルにPIレギュレーターが追加され、閉じたシステムが得られましたこの場合、 論文の本文で詳細に説明されている安定性の証拠があります 。
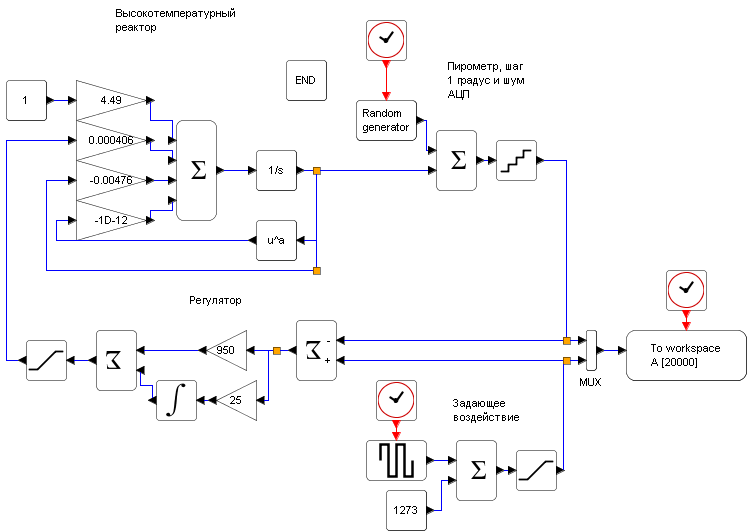
制御システムは、オブジェクトのパラメーターが大幅に変更されてレギュレーターが動作することを確認するために、動作範囲の極端な温度で実行されました。
以下は、摂氏550度および1000度の結果の一部です。 コントロールとして、振幅が20度の段階的なアクションが適用されました。
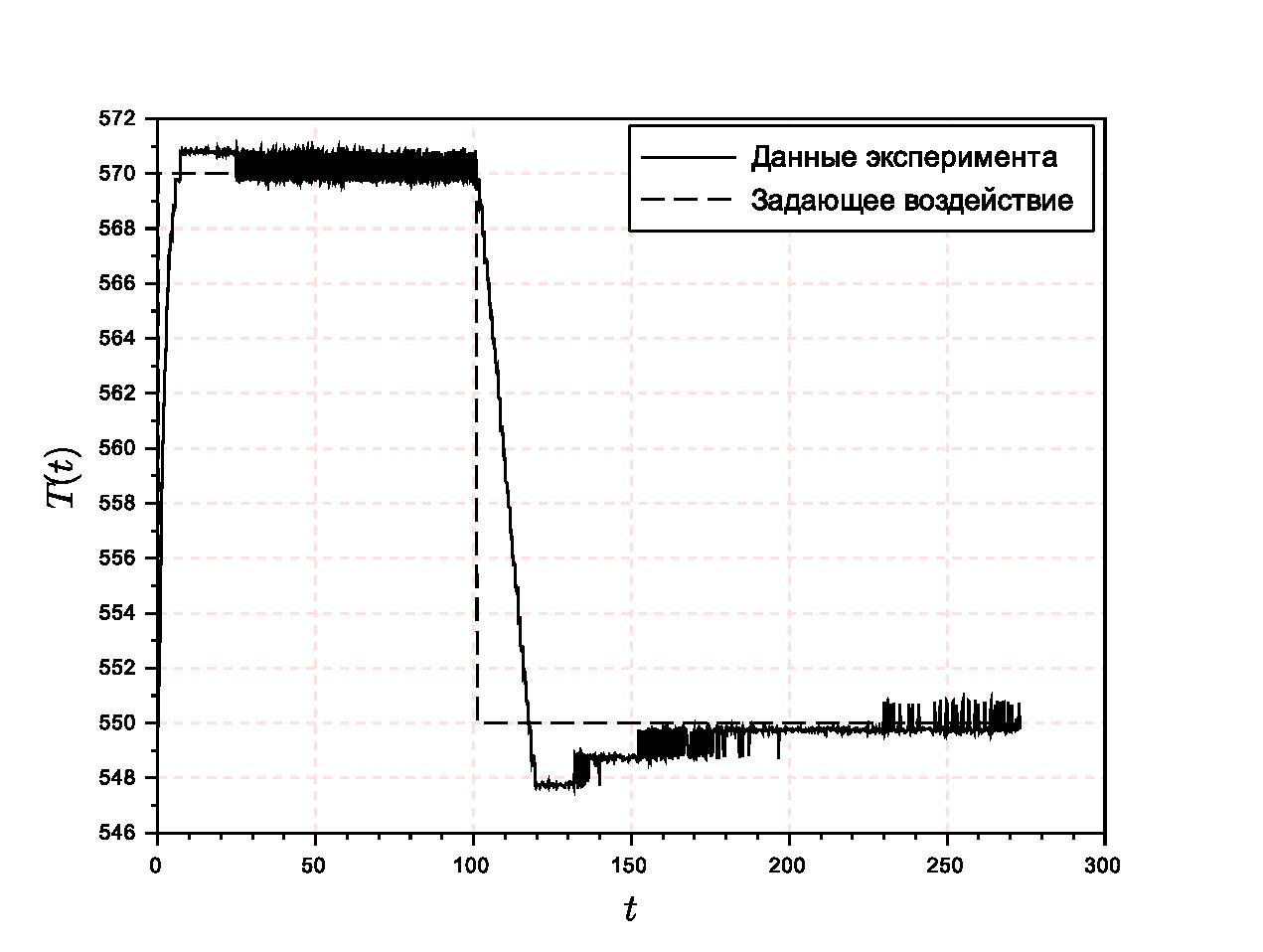
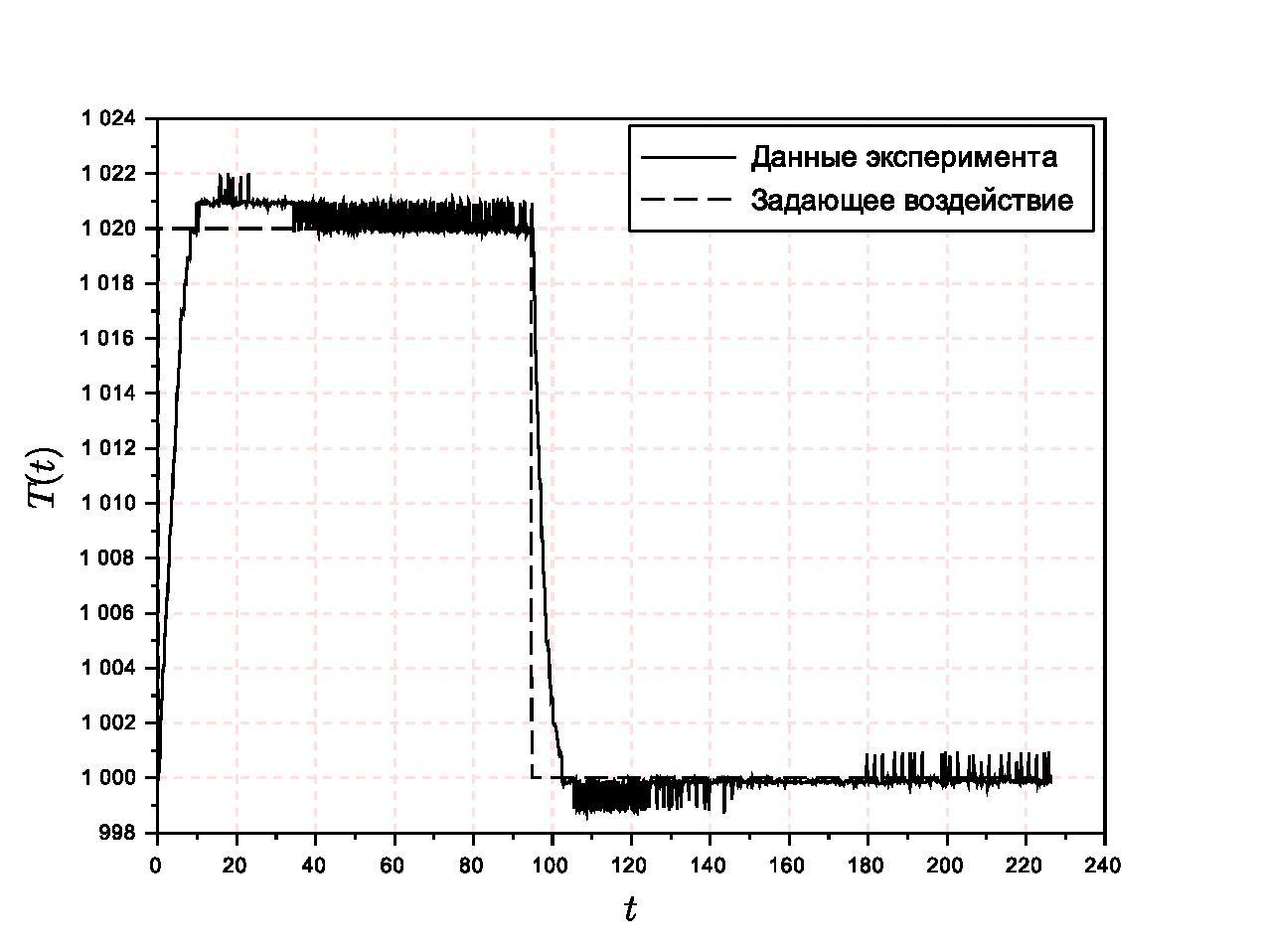
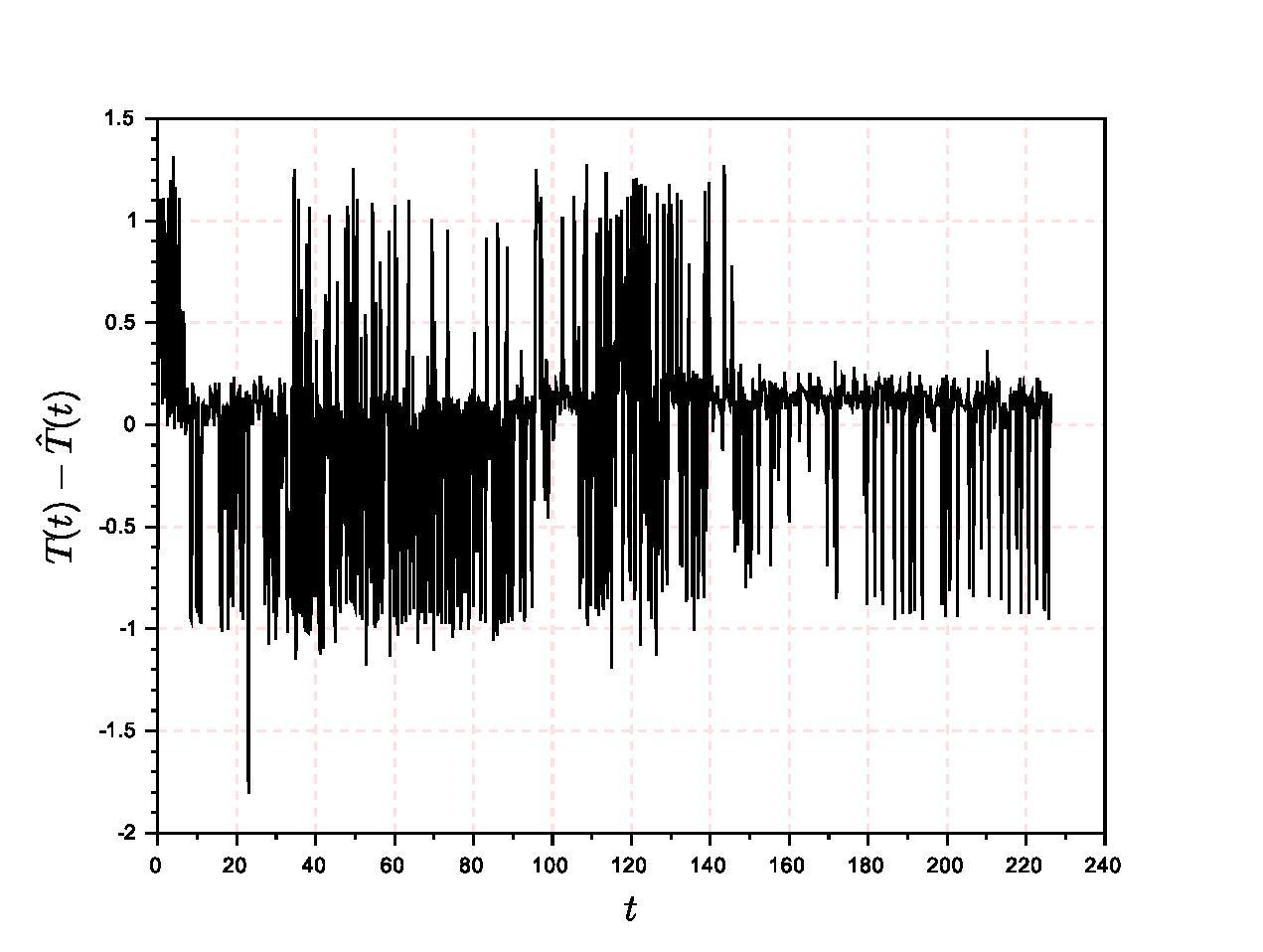
550度のホールドモードでは2度のオーバーシュートが見られるため、レギュレータの比例係数が過大評価されることに注意してください。 数学モデリングと実験データには、1000度モードの次の残差プロットがあります。 閉ループモデルの品質について語るのは難しいですが、見た目はとても良いです。
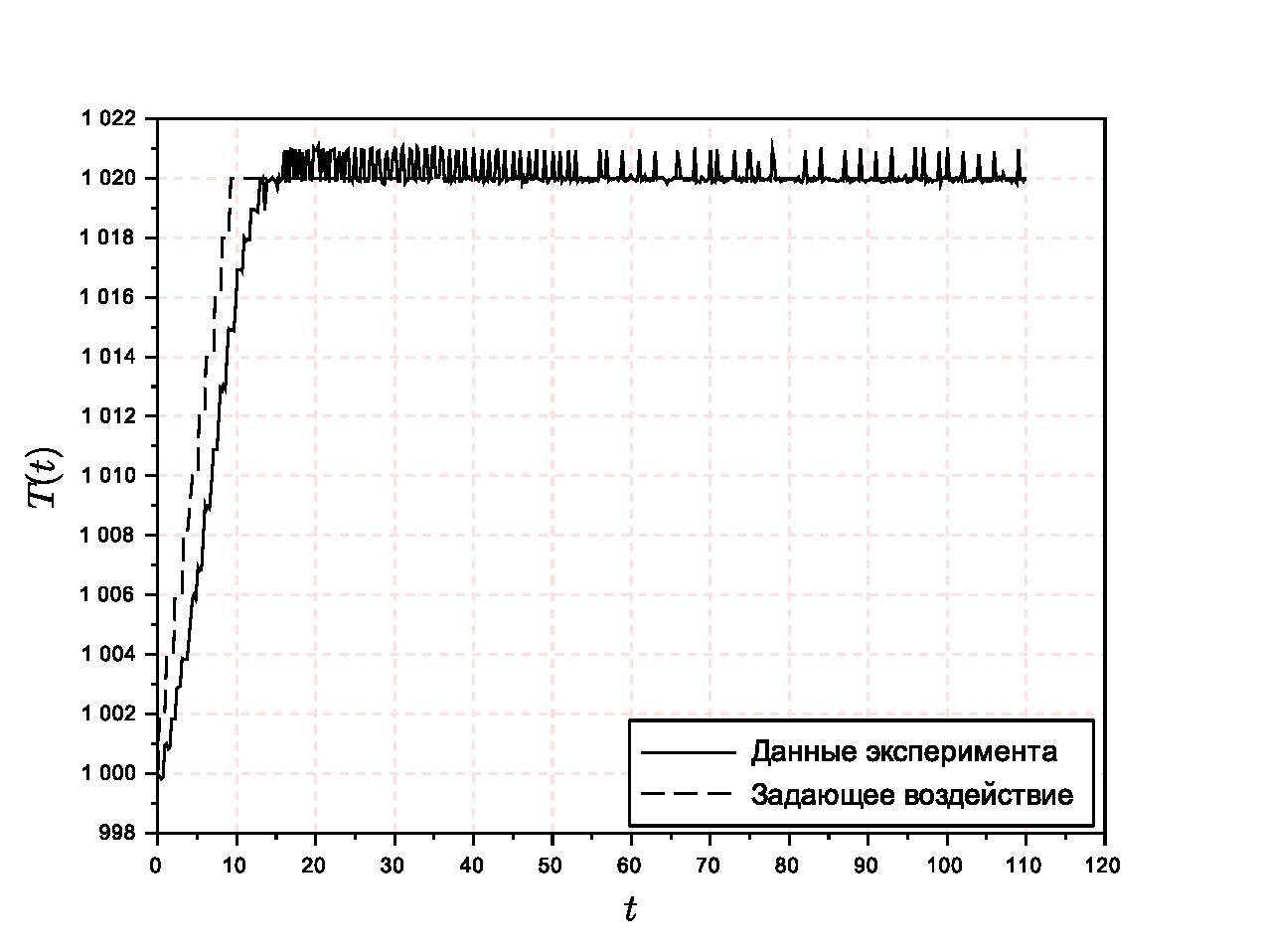
実際のシステムでは、温度のタスクは設定動作の線形増加でスムーズに発生しますが、高電流は高い加熱速度を提供し、グラファイトの急速な劣化につながるため、成長速度を制限する必要があります。 以下は、トラッキング効果のグラフで、1秒あたり2度の速度で、定義効果を直線的に増加させます。 トラッキングエラーの平均定常状態値は4度です。 定常状態での標準偏差は1度を超えないため、タスクは完了したと見なすことができます。
原則として、私の作品の主な実験部分をここで強調します。 繰り返しになりますが、同僚、特にこの問題を終わらせるのに貢献した科学顧問のArastasと 、多数の実験を行い、必要な情報を収集してくれたZavarin Eugeneに感謝します。