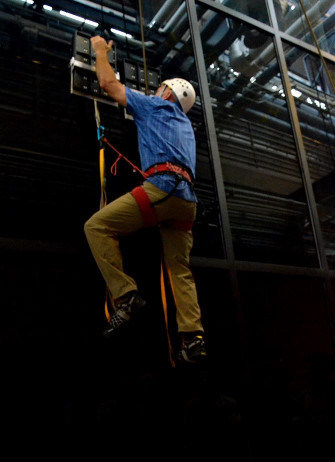
 熱帯ヤモリのトカゲは、地球の表面と同じくらい簡単に、あらゆる材料の壁や天井を走ることができるユニークな足の構造を持っています。 DARPAのZ-manプログラムの目標は、ヤモリの足と同じ原理に基づいて登山用具を作成することです。 6月5日に、DARPAはこのプログラムの最初の重要な成功について報告しました-その質量は122 kgのペイロードとともに、7.6メートルの高さのガラス壁に登り降りしました 。 軍隊にとって、この技術は、特に都市部の戦闘状況において兵士の能力を大幅に拡大するという点で価値があります。 民間の生活では、あらゆる表面にしっかりと接着し、同時に痕跡を残すことなく簡単に剥がれる「スーパー粘着テープ」のさまざまな用途は想像するのが困難です。
熱帯ヤモリのトカゲは、地球の表面と同じくらい簡単に、あらゆる材料の壁や天井を走ることができるユニークな足の構造を持っています。 DARPAのZ-manプログラムの目標は、ヤモリの足と同じ原理に基づいて登山用具を作成することです。 6月5日に、DARPAはこのプログラムの最初の重要な成功について報告しました-その質量は122 kgのペイロードとともに、7.6メートルの高さのガラス壁に登り降りしました 。 軍隊にとって、この技術は、特に都市部の戦闘状況において兵士の能力を大幅に拡大するという点で価値があります。 民間の生活では、あらゆる表面にしっかりと接着し、同時に痕跡を残すことなく簡単に剥がれる「スーパー粘着テープ」のさまざまな用途は想像するのが困難です。
科学者は非常に長い間、ヤモリの秘密を明かすことができませんでした。 脚には、粘着物質を生成する腺、吸引カップ、爪はありません。 それらは、粗い、そして完全に滑らかな表面で自由に動きます。 彼らは簡単に体全体の重量を片足で保持します。 ヤモリは、1秒間に15回まで足を刺したり外したりできます。
ヤモリの足はどのように機能しますか? その表面は多くのひだで覆われており、各ひだには長さ0.1 mmの最高級の毛が多く、各毛の端には数百の枝があり、各枝は幅200 nmの三角形のへらで終わっています。 これらの肩甲骨の数十億は、ヤモリが走る表面に隣接しているため、分子間引力のファンデルワールス力がそれらの間で作用し始めます。 それらは密接な接触でのみ現れ、通常の条件下では無視できます。 ヤモリの足のユニークな構造により、表面との密接な接触面積が大幅に増加します。 ヤモリの毛とへらは、一定の角度で引っ張ることで、表面から簡単に引き裂けるように配置されています。 他の方向では、彼らはそれにしっかりと付着したままです。

ヤモリの足の人工的な類似物を作成する試みは、かなり以前から行われてきました。 数年前、 スティッキーボットはこの原理を使用して開発されました。 また、世界中の多くの研究所で、非常に大きな重量を運ぶことができる「 ヤモリテープ 」を開発しています。 登山用具を作成することの難しさは、同時に大きな荷重を保持する必要があることです(典型的なヤモリの重量は100-200グラムを超えず、荷重のある登山者の重量よりも3桁小さい)、同時に、粘着テープとは異なり、多くのスティックを緩めるサイクルに耐えます顕著なパフォーマンスの低下なし。 DARPAのオーダーでこの開発を行っているケンブリッジ研究所のドレーパーの科学者が達成できたのは、この結果でした。