
前のパートでは、シンセサイザーの新しい「頭脳」用のハードウェアプラットフォームを選択するプロセスについて、ソリューションの技術的特徴について説明し、必要なライブラリーを組み立てるプロセスとプロセスで遭遇する問題について簡単に説明しました。 さて、鉄については、シンセサイザーのキーボードマトリックスがどのように配置されているかを確認し、ソフトウェア部分についてさらに詳しく説明します。
キーボードマトリックス
シンセサイザーのキーボードマトリックスは、マイクロコントローラーの多くのファンがおそらくArduinoに接続している通常のキーボードマトリックスに非常に似ています。 シンセサイザーキーごとに、1つの(最も安価なモデルの)スイッチから2つの(モデルの大部分の)スイッチを提供します。 キーが押されたときに一方が少し早く閉じる2つの隣接するスイッチを使用して、マイクロコントローラーは条件付きの力、またはキーが押された速度を決定できるため、対応するボリュームの音が再生されます。 次のようになります。
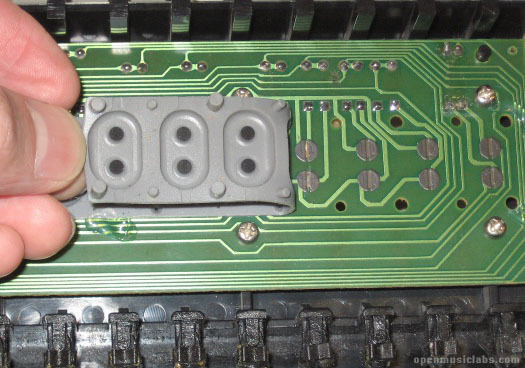
ボードの背面には、押されたキーの「誤った」読み取りを防ぐダイオードがありますが、同時にいくつかのキーを押しています。 キーボードマトリックスの回路図の一部を次に示します。これらの2つのスイッチとそれらに接続されているダイオードが表示されています。
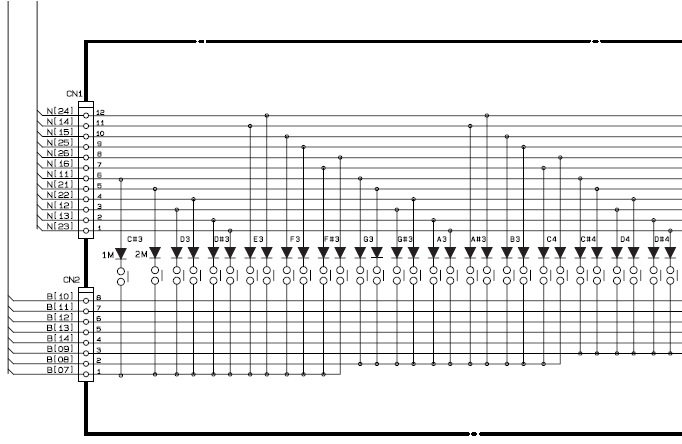
マトリックスをスキャンするために、マイクロコントローラーは列(Nのラベルが付いたピン)を順番にプルし、行のレベル(Bのラベルが付いたピン)を確認します。 行のレベルが高い場合、現在アクティブな「列と行」の組み合わせに対応するキーが押されます。 図はキーボードの一部のみを示しています-合計76個のキーがあります(13行と6 x 2列。これにより、マトリックスのスキャンに合計156のオプションが、マイクロコントローラーの25の使用済み出力が提供されます)。 キーボード全体のスキャンは毎秒数十回実行され、実行者には見えません。
私のシンセサイザーでは、キーボードのスキャンを担当するマイクロコントローラーはもともと、8 MHzの周波数で動作し、4 KBのROMと192バイトのRAMメモリを備えた8ビットのワンタイムプログラマブルHitachi HD63B05V0マイクロコントローラーでした。 残念なことに、このコントローラーは、最初の記事の冒頭で説明した電力事故の後、作動不能であることが判明しました。 しかし、幸いなことに、それは私の既存のATmega162コントローラーとほぼ互換性があり、ボード上の2つのトラックのみを切断して再はんだ付けすることで置き換えました。その1つはRESETピンで、間違った場所にあることが判明しましたHD63B05V0など。
このコントローラーをオンにすると(他のピンにもあるため)組み込みのUARTを使用できなかったため、押されたキーに関する情報を表示するためにシリアルポートのこの一方向(書き込み専用)実装を使用しました。 また、シリアルポートのソフトウェア実装も使用するTinySafeBootブートローダーは、将来のファームウェア更新を可能にするためにマイクロコントローラーに注がれました。 すべての高レベルシンセサイザーソフトウェアの迅速な開発のための言語としてPython + Qt5を選択したため、TinySafeBootのために、AVRマイクロコントローラーのファームウェアを読み書きできるPythonモジュールも作成しました。 AVRマイクロコントローラー自体は、EmbedSky E8ボードのUART1シリアルポートに接続され、レベル変換の必要性を回避するために3.3Vで駆動されます。
AVRのファームウェアソース
#include <avr/io.h> #include <avr/interrupt.h> #include <util/delay.h> #include <string.h> #include "dbg_putchar.h" #define MIDI_BASE 18 #define ZERO_BASE 28 #define KEYS_COUNT 76 #define hiz(port, dir) do { \ (dir) = 0; \ (port) = 0; \ } while(0) #define alow(port, dir) do { \ (dir) = 0xff; \ (port) = 0; \ } while(0) uint8_t keys[KEYS_COUNT]; /* Get state of a row by its index * starting from 1 to 13 */ uint8_t getRow(uint8_t idx) { if (idx <= 8) { return (PINC & (1 << (8 - idx))); } else if (idx >= 9 && idx <= 11) { return (PINE & (1 << (11 - idx))); } else if (idx == 12) { return (PINA & (1 << PIN6)); } else if (idx == 13) { return (PINA & (1 << PIN4)); } return 0; } inline void activateColumn1(uint8_t idx) { PORTD = 0x00 | (1 << (8 - idx)); PORTB = 0x00; } void activateColumn2(uint8_t idx) { if (idx <= 3) { PORTB = 0x00 | (1 << (idx + 4)); PORTD = 0x00; } else if (idx == 4) { PORTB = 0x00 | (1 << PIN4); PORTD = 0x00; } else if (idx == 5 || idx == 6) { PORTD = 0x00 | (1 << (idx - 5)); PORTB = 0x00; } } inline void deactivateColumns(void) { PORTD = 0x00; PORTB = 0x00; } inline void initPorts(void) { hiz(PORTA, DDRA); hiz(PORTC, DDRC); hiz(PORTE, DDRE); PORTB = 0x00; DDRB = 0xfe; DDRD = 0xff; } void resetRows(void) { /* output low */ alow(PORTC, DDRC); alow(PORTE, DDRE); /* don't touch PA7 & PA5 */ DDRA |= 0x5f; PORTA &= ~0x5f; _delay_us(10); /* back to floating input */ hiz(PORTC, DDRC); hiz(PORTE, DDRE); DDRA &= ~0x5f; } /* base MIDI note number is 25: C#0 */ int main(void) { uint8_t row, col, layer; uint8_t note, offset; initPorts(); memset(keys, 0, sizeof(keys)); dbg_tx_init(); dbg_putchar('O'); dbg_putchar('K'); while(1) { for (layer = 0; layer < 2; layer++) { for (col = 1; col <= 6; col++) { if (!layer) activateColumn1(col); else activateColumn2(col); for (row = 1; row <= 13; row++) { note = 6 * row + col + MIDI_BASE; offset = note - ZERO_BASE; if (getRow(row)) { if (!layer) { /* increase velocity counter */ if (keys[offset] < 254 && !(keys[offset] & 0x80)) keys[offset]++; } else { if (!(keys[offset] & 0x80)) { /* generate note-on event */ dbg_putchar(0x90); dbg_putchar(note); /*dbg_putchar(keys[offset]);*/ dbg_putchar(0x7f); /* stop counting */ keys[offset] |= 0x80; } } } else { if (layer) continue; if (keys[offset] & 0x80) { /* generate note off event */ dbg_putchar(0x90); dbg_putchar(note); dbg_putchar(0x00); /* reset key state */ keys[offset] = 0x00; } } } deactivateColumns(); resetRows(); } } } return 0; }
TinySafeBoot用のPythonモジュール
import serial import binascii import struct import intelhex import sys class TSB(object): CONFIRM = '!' REQUEST = '?' def __init__(self, port): self.port = serial.Serial(port, baudrate=9600, timeout=1) self.flashsz = 0 def check(self): if not self.flashsz: raise Exception("Not activated") def activate(self): self.port.write("@@@") (self.tsb, self.version, self.status, self.sign, self.pagesz, self.flashsz, self.eepsz) = \ struct.unpack("<3sHB3sBHH", self.port.read(14)) self.port.read(2) self.pagesz *= 2 self.flashsz *= 2 self.eepsz += 1 assert(self.port.read() == self.CONFIRM) def rflash(self, progress=None, size=0): self.check() self.port.write("f") self.addr = 0 self.flash = "" size = self.flashsz if not size else size while self.addr < size: if progress is not None: progress("read", self.addr, size) self.port.write(self.CONFIRM) page = self.port.read(self.pagesz) if len(page) != self.pagesz: raise Exception("Received page too short: %d" % len(page)) self.addr += len(page) self.flash += page return self.flash.rstrip('\xff') def wflash(self, data, progress=None): if len(data) % self.pagesz != 0: data = data + "\xff" * (self.pagesz - (len(data) % self.pagesz)) assert(len(data) % self.pagesz == 0) self.check() self.port.write("F") self.addr = 0 assert(self.port.read() == self.REQUEST) while self.addr < len(data): if progress is not None: progress("write", self.addr, len(data)) self.port.write(self.CONFIRM) self.port.write(data[self.addr:self.addr + self.pagesz]) self.addr += self.pagesz assert(self.port.read() == self.REQUEST) self.port.write(self.REQUEST) return self.port.read() == self.CONFIRM def vflash(self, data, progress=None): fw = self.rflash(progress, len(data)) return fw == data def info(self): print "Tiny Safe Bootloader: %s" % self.tsb print "Page size: %d" % self.pagesz print "Flash size: %d" % self.flashsz print "EEPROM size: %d" % self.eepsz if __name__ == "__main__": import argparse def progress(op, addr, total): sys.stdout.write("\r%s address: $%0.4x/$%0.4x" % (op, addr, total)) sys.stdout.flush() parser = argparse.ArgumentParser() parser.add_argument("filename", help="firmware file in Intel HEX format") parser.add_argument("--device", help="Serial port to use for programming", default="/dev/ttyUSB0") args = parser.parse_args() tsb = TSB(args.device) tsb.activate() tsb.info() fw = intelhex.IntelHex(args.filename) assert(tsb.wflash(fw.tobinstr(), progress)) assert(tsb.vflash(fw.tobinstr(), progress)) print "\nOK\n"
AVRのプログラマーとして、私はまずLaunchpad MSP430をベースにしたプログラマーを使用しましたが、そのうちいくつかがありますが、この仮設の奇跡(ちなみにうまくいきます)は、中国から到着したTL866CS MiniProプログラマーに取って代わりました。 新しいプログラマーの気持ちは非常にポジティブです。
外部RAMチップを接続するためのAVRマイクロコントローラーインターフェースを介した非常に独創的なスキャン方法を含む、シンセサイザーのキーボード設計とスキャン方法に関する非常に詳細な情報は、 OpenMusicLabsウェブサイトで説明されています
Realtime Preemptionサポートを使用したカーネルのクッキング
スケジューラをより細かく制御し、サウンドを再生する際のレイテンシーを減らすためと、スポーツの関心のために、私はカーネルをPREEPMT RTパッチとともに使用することに決めました。その主な機能の1つは割り込みも「プロセス」になります優先度に基づいてスケジューラーによって横取りされます。 S5PV210プロセッサ用にSamsungが提供する元のコアは、システムの構築に基づいて、明らかにAndroidのカーネルバージョン3.0.8に基づいています。 このカーネルバージョン(3.0.8)のプロジェクトサイトで利用可能なRT_PREEMPTパッチは、競合なしでソースに重ね合わせることを望みませんでしたが、最終的にはすべての競合を手動で解決し、バージョン3.0.8-rt23にパッチを適用することができました。
スピンロックやミューテックスなどの基本構造もこの方法で変更されたカーネルで変更されることが判明したため、ビデオカメラ、静電容量式タッチスクリーンコントローラーなどの一部の周辺機器の独自ドライバーは、最悪の場合、コンパイルされたオブジェクトファイルとしてリンクされなくなりましたオーディオコーデック。 後でそれらに戻り、それらをオフにして、新しく組み立てられたリアルタイムカーネルを使用してボードを初めて起動しようとすると、すぐにカーネルパニックが発生します。 kgdbデバッガーが起動する前でも発生したため(後で判明したように、起動しても動作しません)、デバッグのために、
start_kernel
init/main.c
ファイル(
start_kernel
関数)に挿入して場所を特定する必要がありましたすべてが崩れています。 したがって、カーネル
hrtimers_init()
最後
hrtimers_init()
やったことは、
hrtimers_init()
関数を呼び出すことであり、これは高解像度タイマーとその割り込みを初期化することでした。 このコードはプラットフォーム固有であり、この場合は
arch/arm/plat-s5p/hr-time-rtc.c
ます。 前述したように、PREEMPT RTパッチを使用したカーネルの主な機能の1つは、割り込みがスレッドになることです。 これは通常のカーネルで可能ですが、デフォルトでPREEMPT RTを使用するカーネルは、そのようなほとんどすべての割り込みを作成しようとします。 コードをさらに分析すると、kthreadd_taskタスクがこれらのスレッドの操作に使用され、
start_kernel
関数の最後で初期化されることが示されました。タイマーが初期化されるよりもずっと後です。 この低下は、kthreadd_taskがまだNULLであったのに、カーネルがストリーミングによってタイマーを中断しようとしたためです。 これは、どのような状況でもストリーミングされるべきではない個々の割り込みを設定することで解決されます。IRQF_NO_THREADフラグは、
hr-time-rtc.c
タイマー割り込みフラグに追加されました。 やった! カーネルは起動しましたが、これはほんの始まりです...
前述したように、副作用の1つは、オーディオ入力/出力を担当するモジュールが新しいカーネルとのリンクを停止したことです。 これは、PREEMPT RTを使用するカーネルが(バージョン3.0.8で)SLABメモリ管理メカニズムのみをサポートし、最初はモジュールが新しいカーネルでサポートされていないSLUBメカニズムを有効にしてコンパイルされたためです。 しかし、Kaspersky Labで働くことができたのは幸運で、ARMのHex-Raysデコンパイラーを使用してドライバーとコーデックファイルを逆コンパイルするよう同僚に説得し、その後、ソースコードをほぼ完全に再作成することができました。 実際には、その結果、オーディオインターフェイスは「新しい」ドライバで決定されたため、WM8960マイクロサーキットレジスタを初期化するための低レベルの手順の違いにより、サウンドはアーティファクトで再生されました。 しばらくの間、ドライバーを調整しようとしましたが、その後、より簡単な方法を選択しました-私は中国の会社EmbedSky Techに送って、そこでミニコンピューターとPREEMPT_RTのパッチを購入し、オーディオドライバーファイルのコンパイルと送信を依頼しました。 すぐに応答し、最終的にサウンドが期待どおりに機能するファイルを送ってくれました。
ところで、逆コンパイルしたドライバーで忙しかったのですが、kgdbデバッガーが自分のカーネルでも元のカーネルでも動作しないことがわかりました。 判明したように、シリアルポートの同期ポーリングが必要です。これは、Samsungシリアルポートドライバー(
drivers/tty/serial/samsung.c
)では利用できませんでした。 このパッチに基づいてドライバーに必要なサポートを追加し、その後デバッガーが動作しました。
さらに掘ります。 新しいコアの第2の副作用は非常に低く、大きな「遅れ」、S5PV210チップ上のシステムの4つのすべての長いシリアルポートの速度であることが判明しました。ポーリングキーボードシンセサイザー。 長い間、私はその理由を理解しようとしましたが、端末に各文字を入力すると、数百万のシリアルポート割り込みが生成されることに気づきました-カーネルはそれらを処理するために急いでいないようでした。 最後に、上記のフラグを使用してIRQF_NO_THREADすべてのシリアルポート割り込みを非スレッドにすることで、この問題を解決しました。 このソリューション
serial_core.c
、Samsungドライバーに加えて、
serial_core.h
と
serial_core.h
を変更しなければならず、一般的にすべてのシリアルポートに影響するため、あまり美しくありませんでした。 PREEMPT RTを使用したカーネルでは、NO_THREADのドライバーでspin_lock_tを使用できないが、raw_spinlock_tを使用する必要があるため。
前述したように、512 MBのRAMからビデオカメラ、ハードウェアコーデック、HDMIなどのさまざまな周辺機器をサポートする元のカーネルでは、約390 MBしか使用できず、残りは上記のデバイス用に予約されていました、常に(カーネル構成プロセス中に無効にされた場合でも)。 特にシンセサイザーがサンプルを保存するのに余分な120 MBのRAMが邪魔にならないことを考えると、非常に無駄です。 メモリはファイル
arch/arm/mach-s5pv210/mach-tq210.c
に予約されていました。これは、特定のマシン(この場合はボード)の構成とデバイスに関するすべての情報を収集するための主要なポイントです。 メモリの割り当て
s5p_reserve_bootmem
関数の呼び出しについてコメントし、
s5p_reserve_bootmem
機能するために120 MBの追加メモリを取得します。
カーネルに加えられた最後の変更は、オーディオデータの最小バッファサイズに関するもので、元のメモリの1ページに相当し、44100 Hzのサンプリング周波数で、16ビットの2チャネルがそれぞれ約20ミリ秒-少し多かった。 この値は、ファイル
sound/soc/samsung/dma.c
で128バイトに変更され、その後、安定性とパフォーマンスを犠牲にすることなく、最小バッファーサイズが数ミリ秒に削減されました。
PREEMPT RTおよびGitHubのすべての変更を含むカーネルソースコード
AVRマイクロコントローラーはどのようにLinuxSamplerと通信しますか
AVRはミニコンピューターボードのシリアルポートに接続され、既製のMIDIメッセージをソフトウェアUARTに出力します。 ドライバーを記述する必要をなくすために、すべてのオーディオおよびMIDIデータのトランスポートとしてJACKサーバーを使用することが決定されました。 Cの小さなアプリケーションがシリアルポートに接続し、JACKに自身をMIDI-OUTとして登録し、受信したすべてのMIDIメッセージのリダイレクトを開始します。JACKはすでにそれらをLinuxSamplerに配信します。 安くて陽気な。
シリアルポートとJACK間のブリッジアプリケーションのソースコード
#include <stdio.h> #include <stdlib.h> #include <sys/types.h> #include <sys/time.h> #include <unistd.h> #include <assert.h> #include <string.h> #include <sysexits.h> #include <errno.h> #include <signal.h> #include <fcntl.h> #include <termios.h> #include <jack/jack.h> #include <jack/midiport.h> #define UART_SPEED B9600 jack_port_t *output_port; jack_client_t *jack_client = NULL; int input_fd; void init_serial(int fd) { struct termios termios; int res; res = tcgetattr (fd, &termios); if (res < 0) { fprintf (stderr, "Termios get error: %s\n", strerror(errno)); exit (EXIT_FAILURE); } cfsetispeed (&termios, UART_SPEED); cfsetospeed (&termios, UART_SPEED); termios.c_iflag &= ~(IGNPAR | IXON | IXOFF); termios.c_iflag |= IGNPAR; termios.c_cflag &= ~(CSIZE | PARENB | CSTOPB | CREAD | CLOCAL); termios.c_cflag |= CS8; termios.c_cflag |= CREAD; termios.c_cflag |= CLOCAL; termios.c_lflag &= ~(ICANON | ECHO); termios.c_cc[VMIN] = 3; termios.c_cc[VTIME] = 0; res = tcsetattr (fd, TCSANOW, &termios); if (res < 0) { fprintf (stderr, "Termios set error: %s\n", strerror(errno)); exit (EXIT_FAILURE); } } double get_time(void) { double seconds; int ret; struct timeval tv; ret = gettimeofday(&tv, NULL); if (ret) { perror("gettimeofday"); exit(EX_OSERR); } seconds = tv.tv_sec + tv.tv_usec / 1000000.0; return seconds; } double get_delta_time(void) { static double previously = -1.0; double now; double delta; now = get_time(); if (previously == -1.0) { previously = now; return 0; } delta = now - previously; previously = now; assert(delta >= 0.0); return delta; } static double nframes_to_ms(jack_nframes_t nframes) { jack_nframes_t sr; sr = jack_get_sample_rate(jack_client); assert(sr > 0); return (nframes * 1000.0) / (double)sr; } static double nframes_to_seconds(jack_nframes_t nframes) { return nframes_to_ms(nframes) / 1000.0; } static jack_nframes_t ms_to_nframes(double ms) { jack_nframes_t sr; sr = jack_get_sample_rate(jack_client); assert(sr > 0); return ((double)sr * ms) / 1000.0; } static jack_nframes_t seconds_to_nframes(double seconds) { return ms_to_nframes(seconds * 1000.0); } static void process_midi_output(jack_nframes_t nframes) { int t, res; void *port_buffer; char midi_buffer[3]; jack_nframes_t last_frame_time; port_buffer = jack_port_get_buffer(output_port, nframes); if (port_buffer == NULL) { printf("jack_port_get_buffer failed, cannot send anything.\n"); return; } jack_midi_clear_buffer(port_buffer); last_frame_time = jack_last_frame_time(jack_client); t = seconds_to_nframes(get_delta_time()); res = read(input_fd, midi_buffer, sizeof(midi_buffer)); if (res < 0 && errno == EAGAIN) return; res = jack_midi_event_write(port_buffer, t, midi_buffer, 3); if (res != 0) { printf("jack_midi_event_write failed, NOTE LOST."); } } static int process_callback(jack_nframes_t nframes, void *notused) { if (nframes <= 0) { printf("Process callback called with nframes = 0; bug in JACK?"); return 0; } process_midi_output(nframes); return 0; } int connect_to_input_port(const char *port) { int ret; ret = jack_port_disconnect(jack_client, output_port); if (ret) { printf("Cannot disconnect MIDI port."); return -3; } ret = jack_connect(jack_client, jack_port_name(output_port), port); if (ret) { printf("Cannot connect to %s.", port); return -4; } printf("Connected to %s.", port); return 0; } static void init_jack(void) { int i, err; jack_client = jack_client_open("midibridge", JackNullOption, NULL); if (jack_client == NULL) { printf("Could not connect to the JACK server; run jackd first?"); exit(EXIT_FAILURE); } err = jack_set_process_callback(jack_client, process_callback, 0); if (err) { printf("Could not register JACK process callback."); exit(EXIT_FAILURE); } char port_name[32]; snprintf(port_name, sizeof(port_name), "midi_out"); output_port = jack_port_register(jack_client, port_name, JACK_DEFAULT_MIDI_TYPE, JackPortIsOutput, 0); if (output_port == NULL) { printf("Could not register JACK output port '%s'.", port_name); exit(EXIT_FAILURE); } if (jack_activate(jack_client)) { printf("Cannot activate JACK client."); exit(EXIT_FAILURE); } } static void usage(void) { fprintf(stderr, "usage: midibridge -a <input port>\n"); exit(EXIT_FAILURE); } int main(int argc, char *argv[]) { int ch; char *autoconnect_port_name = NULL; while ((ch = getopt(argc, argv, "a:")) != -1) { switch (ch) { case 'a': autoconnect_port_name = strdup(optarg); break; default: usage(); } } input_fd = open("/dev/ttySAC1", O_RDWR | O_NOCTTY | O_NDELAY | O_NONBLOCK); if (input_fd < 0) { fprintf(stderr, "Cannot open serial port %s\n", strerror(errno)); return EXIT_FAILURE; } init_serial (input_fd); init_jack(); if (autoconnect_port_name) { if (connect_to_input_port(autoconnect_port_name)) { printf("Couldn't connect to '%s', exiting.", autoconnect_port_name); exit(EXIT_FAILURE); } } getc(stdin); return 0; }
このソリューションでは、JACKへのオーディオ出力をサポートするmplayerを介してARMおよびWAV / MP3用にコンパイルした
jack-smf-player
を使用して、JACKでMIDIファイルを再生することもできます。
ボーナス
以前の投稿に対するnefelim4agのコメントのおかげで、私はlibhybris-通常のLinuxシステムでAndroidドライバーを使用できるライブラリーの存在について学びました。 タンバリンとのいくつかのダンスの後、残念ながら、私はシステムでlibhybrisを取得し、OpenGL ES 2.0、EGLFS、およびQt Quick 2.0をサポートしてQt 5およびPyQt5を再構築できました。 現在、私のユーザーインターフェイスはQt Quickを使用
最後に
シンセサイザーが半分に分類された状態にあるため、小さなデモはこれまでのところオーディオのみです。 ビデオは、中国で注文されたマザーボードが到着し、シンセサイザーのすべての部品を接続した後、8月に生まれる可能性が高い次の投稿にあります。 さらに、次の投稿は、このような低レベルのカーネル操作ではなく、PyQt5およびQtQuickのソフトウェアのユーザー部分を念頭に置いて、もちろん、結果を実証するプロセスに専念するでしょう。
誰かが興味がある場合:
ARM用にクロスコンパイルされたすべてのソフトウェアをリストする
- alsa-lib-1.0.27.2
- alsa-utils-1.0.27.2
- libaudiofile-0.3.6
- dbus-1.8.0
- dropbear-2014.63
- fftw-3.3.3
- fluidsynth-1.1.6
- fontconfig-2.11.0
- freetype-2.5.3
- glib-2.34.3
- libicu-52.1
- jack-audio-connection-kit-0.121.3
- jack-smf-utils-1.0
- libffi-3.0.13
- libgig-3.3.0
- libgig-svn
- リブリブリス
- libsamplerate-0.1.8
- libsndfile-1.0.25
- linuxsampler-1.0.0
- linuxsampler-svn
- mplayer SVN-r36900-4.4.6
- openssl-1.0.0l
- psutil-1.2.1
- pajack-0.5.2
- PyQt-gpl-5.2
- pyserial-2.7
- Python 2.7.6
- strace-4.8
- tslib-1.4.1
このリストから何かを収集する必要があり、問題がある場合は、喜んで私の経験を共有します。 さらに、ここで述べられていることの多くは、FriendlyARM Tiny210と呼ばれる別の一般的なプラットフォームにも当てはまります。これは、同じS5PV210プロセッサに基づいており、おそらく誰かがリアルタイムコアを使用する必要があります。