まえがき
今シーズン、私はマイクロ相撲だけに真剣に取り組んでいたことが判明しました。ロボットの製造を開始したのは2013年7月で、2014年3月末までに終了しました。 5 cm * 5 cm * 5 cmの立方体に収まるはずです。彼は4月6日、彼が唯一のロボットであった1つの競技会でのみ展示しました。
Black Pythonは両面テープと競合します。
サンクトペテルブルクでは、現時点ではこのクラスのロボットは2台しかないため、このタイプの競技は5月の競技には含まれていません。 そして、私は話をしたかったので、5年間で10人がロボット工学(レゴで作られたものを除く)に情熱を持っていたので、ライトトレーサー、つまりラインに沿って動くロボットをすばやく作ることにしました。
設計
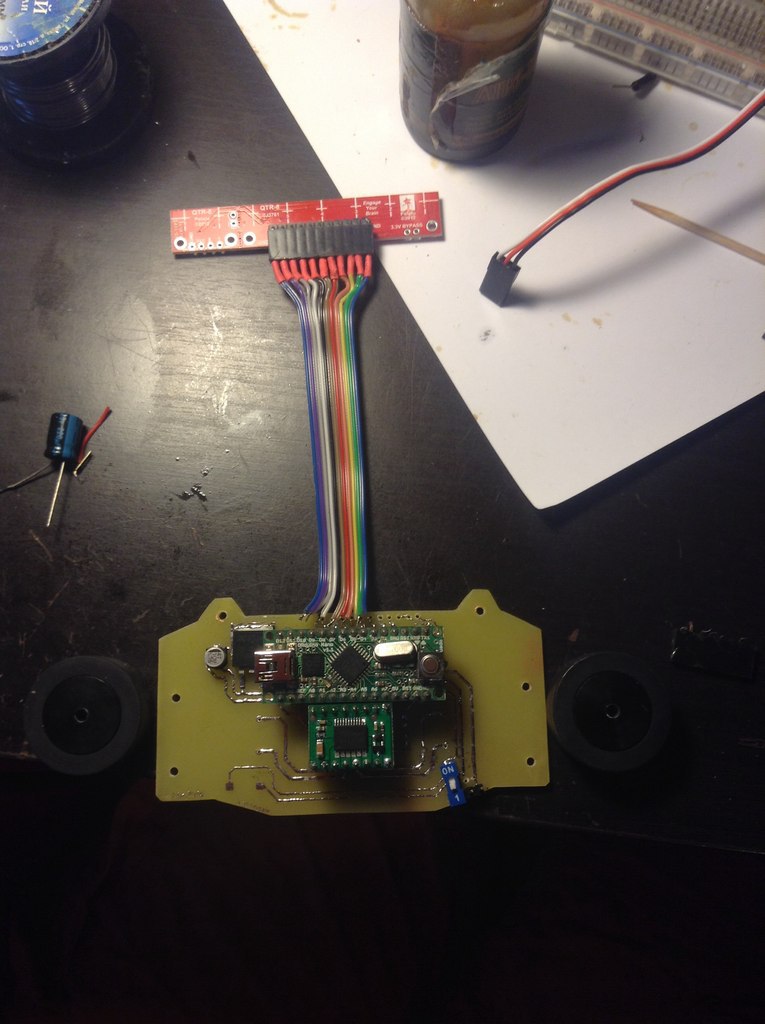
タスクはできるだけ早くロボットを作成することだったため、Freeduino Nano、モジュラーエンジンドライバー、既製のセンサーストリップという既成のソリューションに頼らなければなりませんでした。 ロボットを起動する機会は、土曜日の12時のみに現れました。
14.00:不足している詳細に対するマイクロニクスの弾丸!
15.00:ふう、私は必要なものすべてを持って帰ってきた。
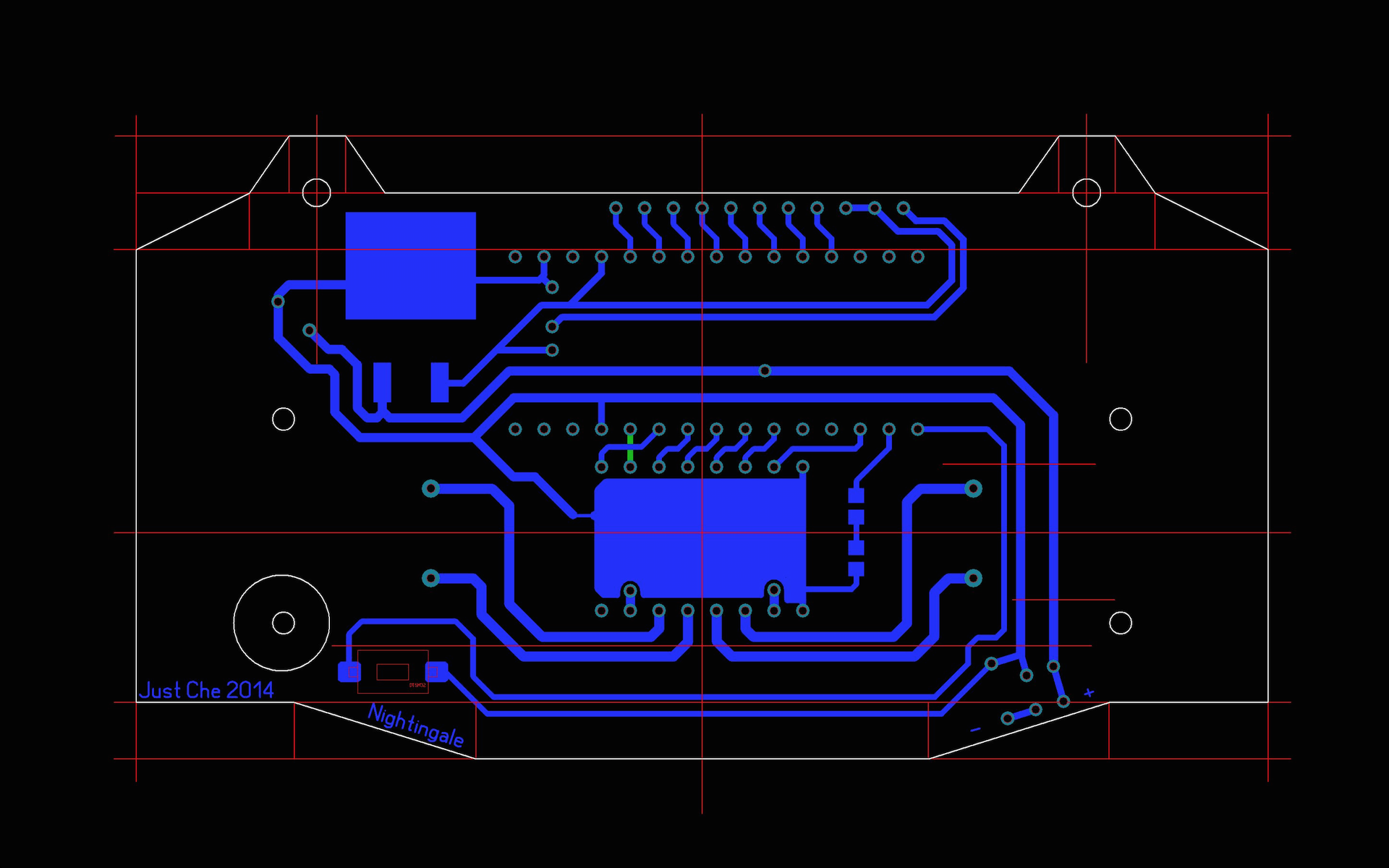
15.30:私は食べました、デザインすることは可能です。 私は本当に美しいロボットを作りたかったのですが、モジュラーパーツの入手可能性と限られた時間のおかげですべてが無駄になったため、長い間デザインとレイアウトについて考えていませんでした。
18.30:配線の最終バージョンです(さらに2つありました)。
建設の製作
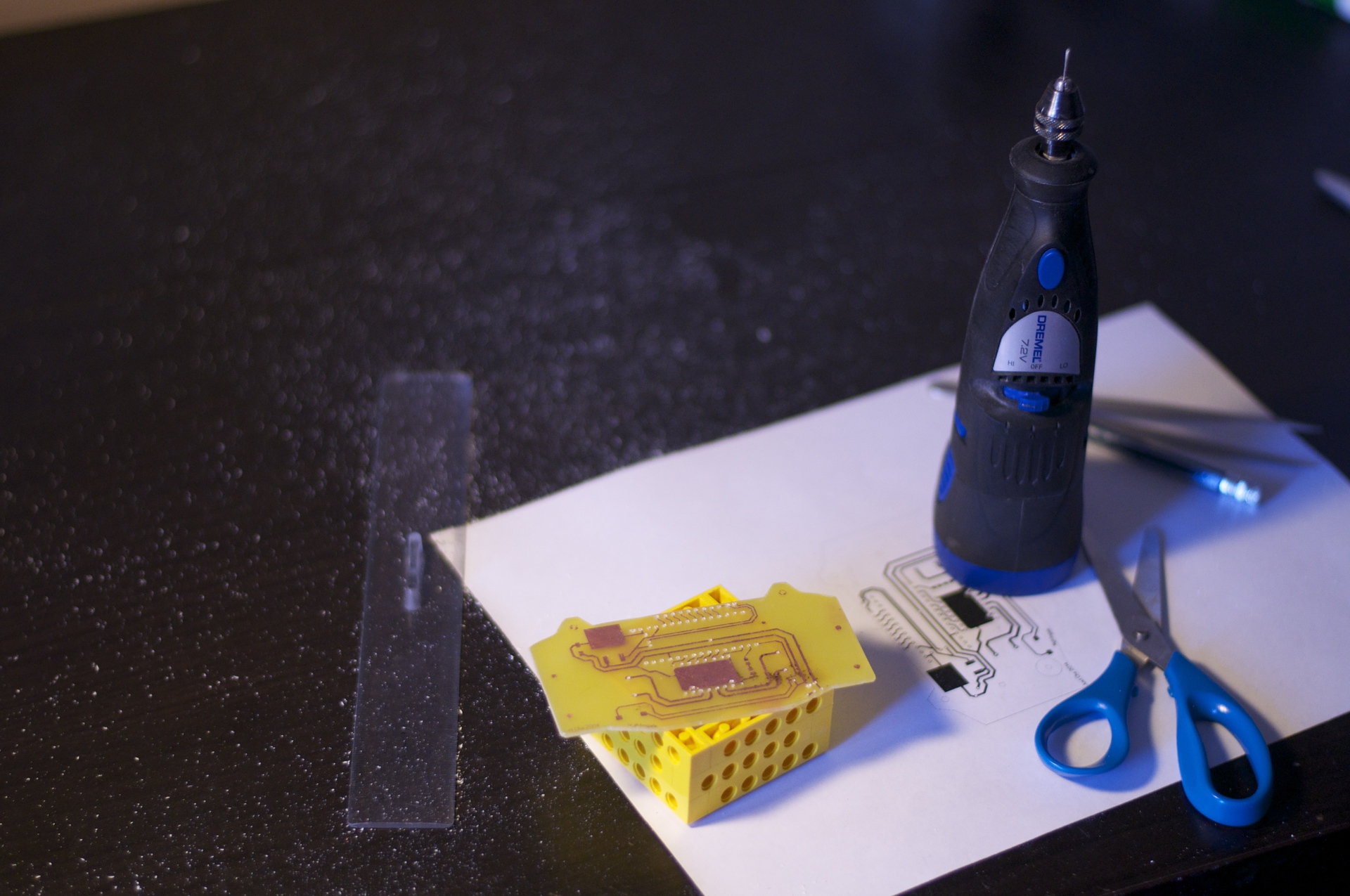
最初の計画はシンプルでした。LUT->ボードの切断->穴あけ->はんだ付け->モーターとセンサーの固定。 しかし、すべてが冒険なしでいつ行ったのですか? 残っているのはマット紙だけです。これはLUTにふさわしくなく、詳細はパッケージや箱などに散らばっています。
18.35:まあ、それはいまいましい、それは行き過ぎではない。
18.40:まあ、トナーは落ちません。テキソライトをもう一度カットする必要があります。
18.50:ふう、転任しました。
19.00:エッチングされたので、今からノコギリを開けます。
10.19:切り取ります。
19.15:はんだ付け、はんだ付け、およびはんだ付けの再実行。
19.30:ああ! コネクタをはんだ付けするのは非現実的です。そのため、要素と同じ側からLUTトラックをもう一度作成します。
20.20:それで全部です。ワイヤーを下から投げるだけです。
20.40:スタビライザーは動作しますが、暖かくさえありません。 ピザ休憩を取ることができます。
10.21:ボットを作り続ける時間です。
21.30:エンジンドライバーはどこにありますか?
21.50:見つかりました。 ここで、duniをセンサーに接続するためのきちんとしたケーブルが必要です。
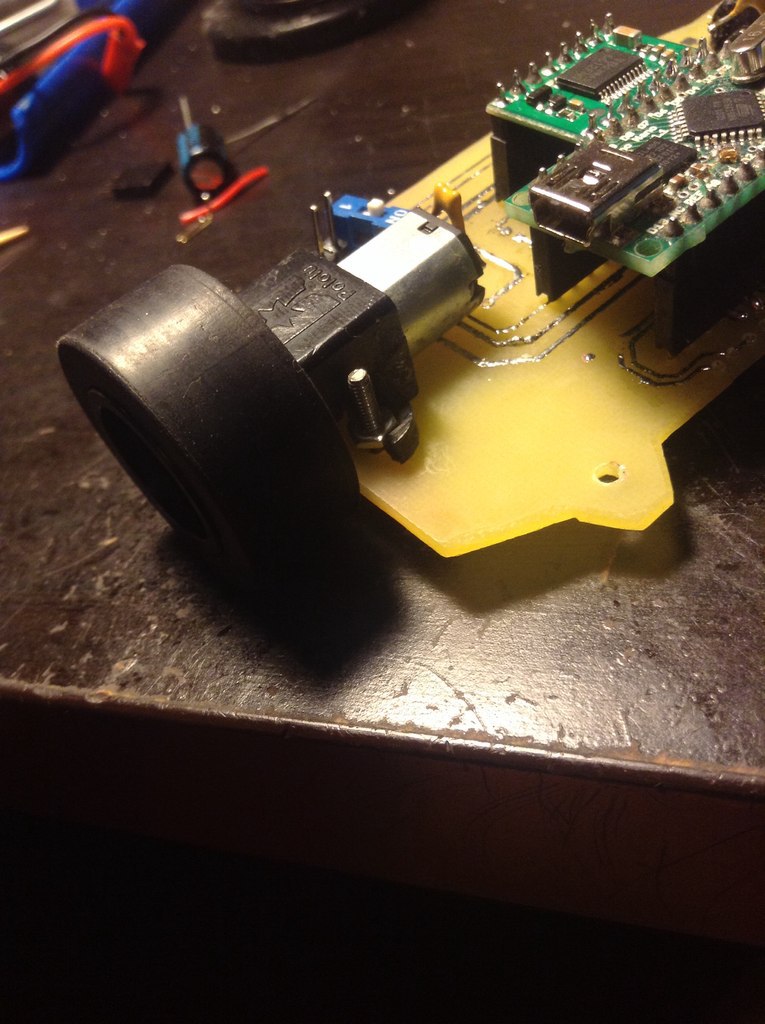
22.20:さて、今モーター。 22.30:さて、なぜマウントが割れたのですか?
22.40:うーん、そしてセンサーのレールは何から作るのですか?
10.23:さて、これは明日の問題です。
23.25:ショーティー。 少しはんだ付けする必要があります。
23.30:はんだ付け。 動作しますが、加熱しません。
23.50:さあ、アルドゥイーノ、もう聞いて!
00.30:彼女のためにドライバーを置かないでください。 明日私は別のものに変更します。 そして今、私たちは競争と睡眠のために集まる必要があります。

9.30:コンテストに参加しました。
10.00:チェックイン、フィールドを選択(ラインの太さ-1.5 cm)

12.00:すべて、建設を終え、ナヌを交換し、スラットを入れ、ドラッグを接着しました。
12.30:私は他の種を見ました、あなたはスキップし始めることができます。
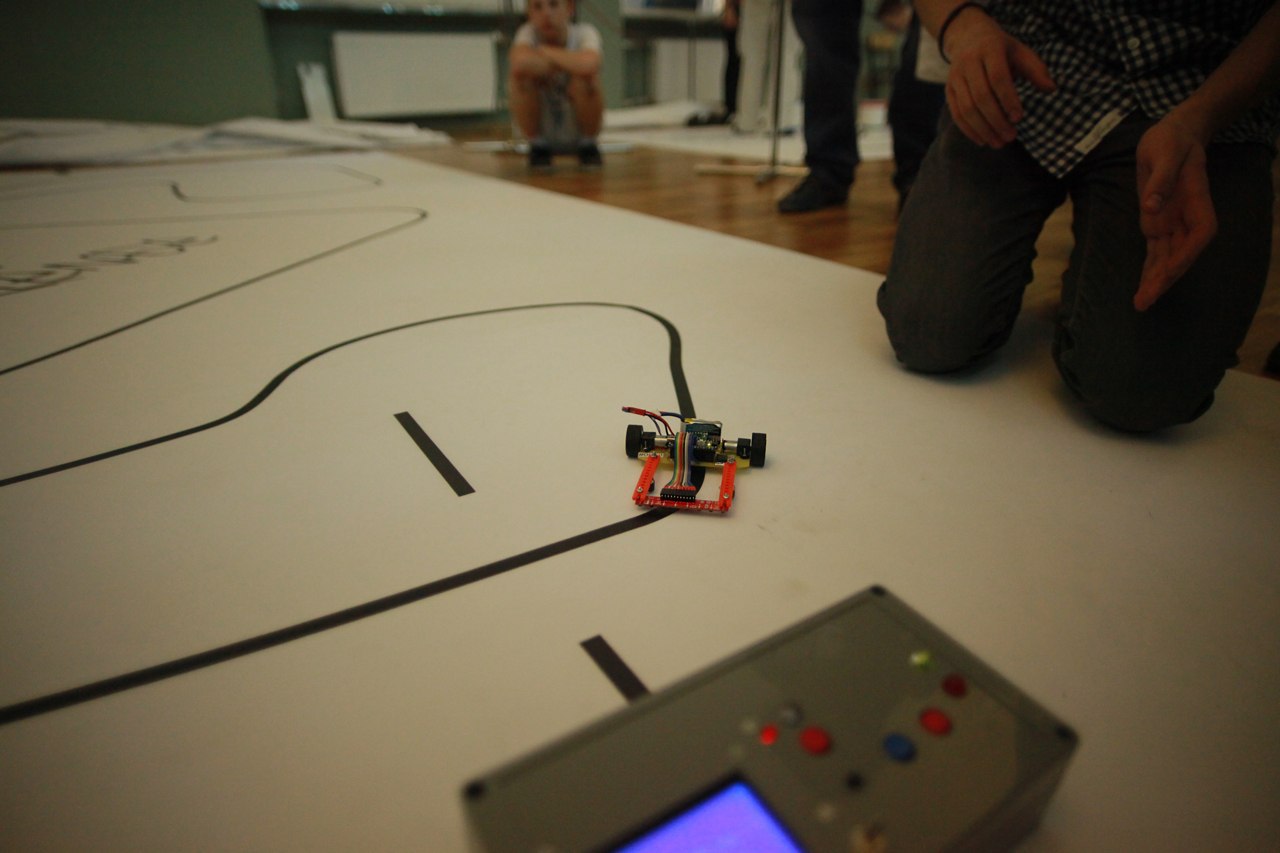
13.00:28%の速度のPコントローラーで、ボットはテストトラックを完全にパスしました! そのため、ロボットは1日で判明しました。
おわりに
到着は15:30に始まったため、結果を改善する時間がありました。 PDを作成した後、Kostya(私のパートナー)が主導権を握り、熱意をもってプログラムのデバッグと改善を開始しました。 デバッグがあったように聞こえたときに、このロボットの「賛歌」として歌Muse-Madnessを選択しました。 最初の試行では、ロボットは16秒でトラックを運転し、2回目と最後の14.25で最後の勝者と同じ結果になりました。 しかし、彼は私たちよりも良い最初の試みを持っているので、私たちは2位になりました。

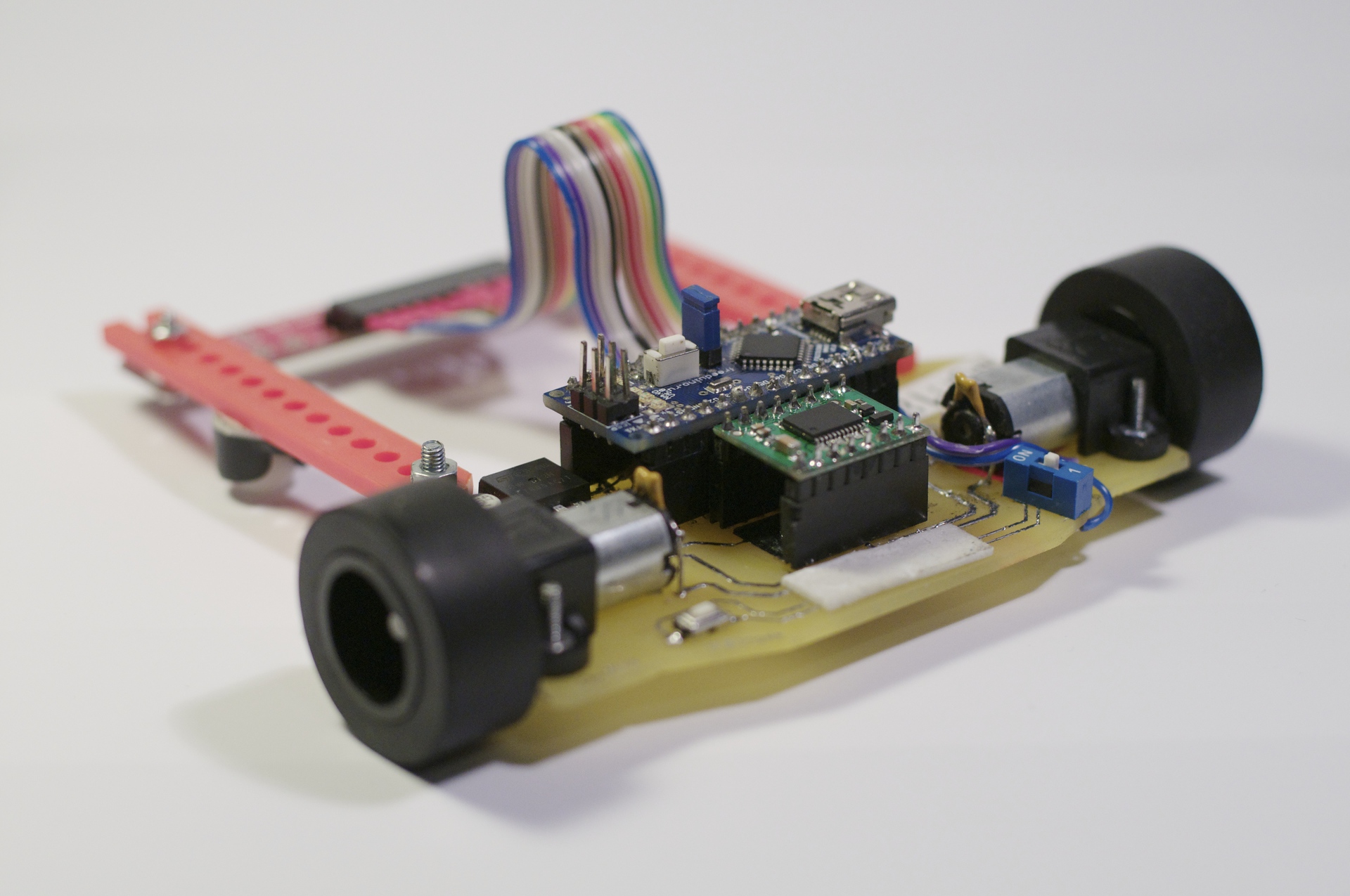
そして実際、ロボットの写真:
チェックイン動画: