
こんにちは、ハブラフチアン!
LabViewとは何で、何を食べますか?
LabViewは、National Instrumentsによるクロスプラットフォームのグラフィカル開発環境です。 LabViewは、データ収集システム、および技術オブジェクトと技術プロセスの管理に広く使用されています。
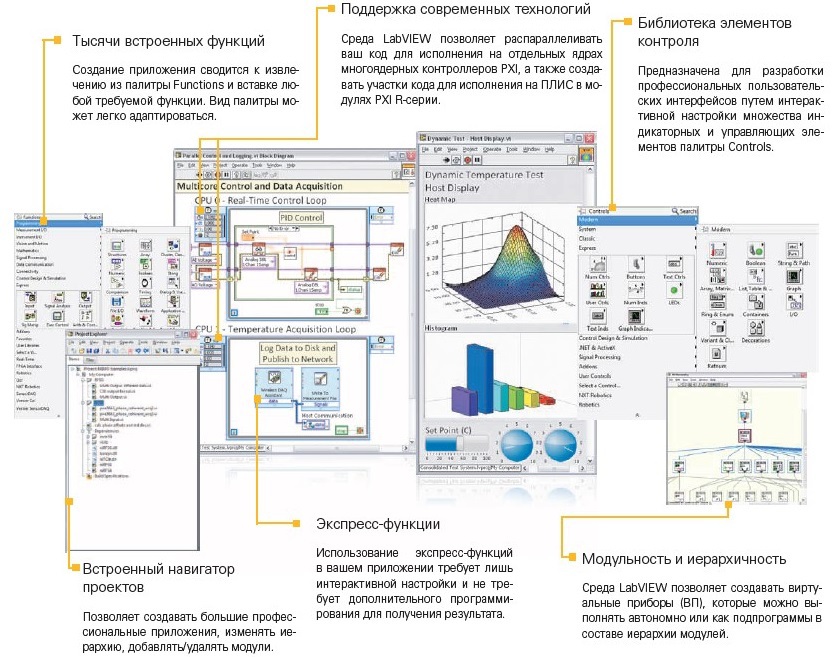
LabViewの特徴は、「鉄」の下で開発するための「シャープな」環境です。 さまざまなメーカーの機器とやり取りするように設計された多数のライブラリにより、ロボットやマシンビジョンシステムの制御など、さまざまな問題に対するソリューションを非常に迅速かつ快適にプロトタイプ化できます。 ナショナルインスツルメンツが提供し、さまざまなロボットコンポーネントとやり取りするためのライブラリを含む公式のLabVIEWロボットモジュールに加えて、愛好家自身が多数のライブラリを開発し、最も重要なこととして、無料で配布しています。 今日、LabViewを使用したロボティクスの多数のソリューションを見ることができます。これは、わが国で近年最も印象的なものの1つです。Robocross-2013およびEurathlon 2013のNAMTチームの自律型ロボットです。
それがすべて始まった方法。
私はMSTUを卒業しています。 N.E.バウマンとロボット工学が好きですが、私の活動の主な焦点は産業オートメーションです。 数年前にLabViewに出会い、この環境に夢中になり、それ以来、可能な限りそれを使用しようと試みてきました。 現在、さまざまなプロジェクトでLabViewを使用することに加えて、データ収集システムでのLabViewの使用に関連する学生のために、オプションのクラスと実験室作業を行っています。 最近、私たちのロボットセンターのおかげで、さまざまな科学的目的でそれらを使用するためのロボットキットを手に入れることができました。 この点で、ロボット工学におけるLabViewの使用に関連する一連の作品を公開したいと思います。主な重点は、学生のための実験室作業でのさらなる使用のための単純な例の実装にあります。 少し前まで、私は韓国の企業Robotisのロボットデザイナーに対処し、このデザイナーとやり取りするためにLabViewでいくつかの簡単な例を開発するよう提案されました。 特に興味深いのは、Zigbeeワイヤレスインターフェイスを介してデータ交換を調整する必要があるという事実でした。 プロトタイプとして、OLLO BUGとBioloid STEMキットが来ました。
OLLO BUGの構成 
バイオロイドSTEMキットの構成 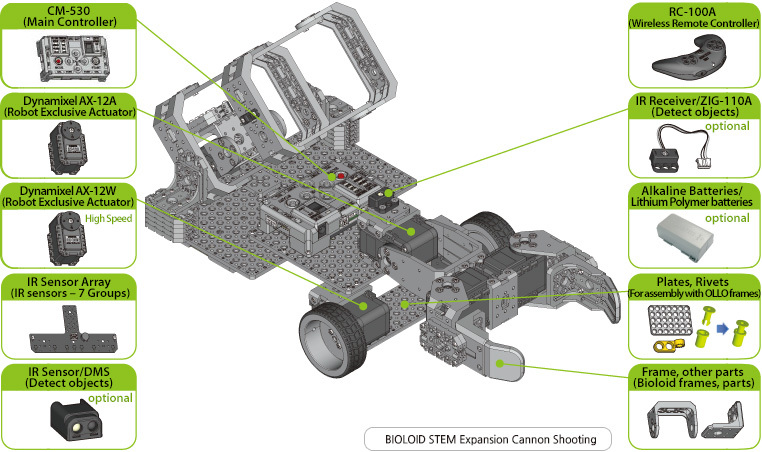
OLLOの特徴的な機能は、バイオロイドと比較して、より「単純な」コンポーネントです。 特に、OLLOキットにはCM-100コントローラーが含まれていますが、CM-530にはBioloidキットが付属しています。
SM-100 
SM-530 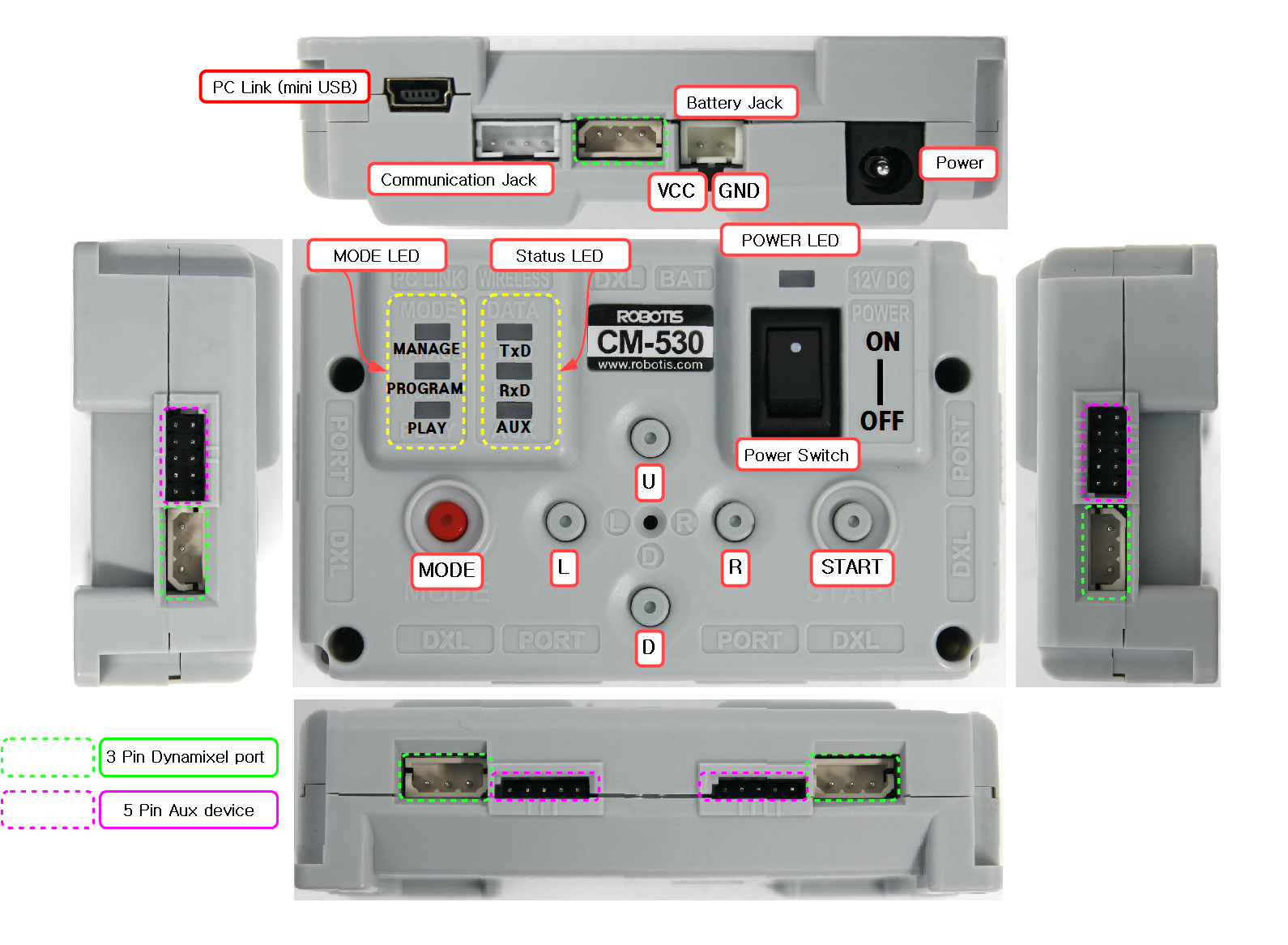
ワイヤレスインターフェイスを整理するために、Robotisが提供する「ネイティブ」アダプターの束を使用しました。
1. ZIG-100 / 110A-コントローラー(テール付きのもの)に接続し、アダプター(チップの形で作られています)にインストールします。
ZIG-100 / 110A 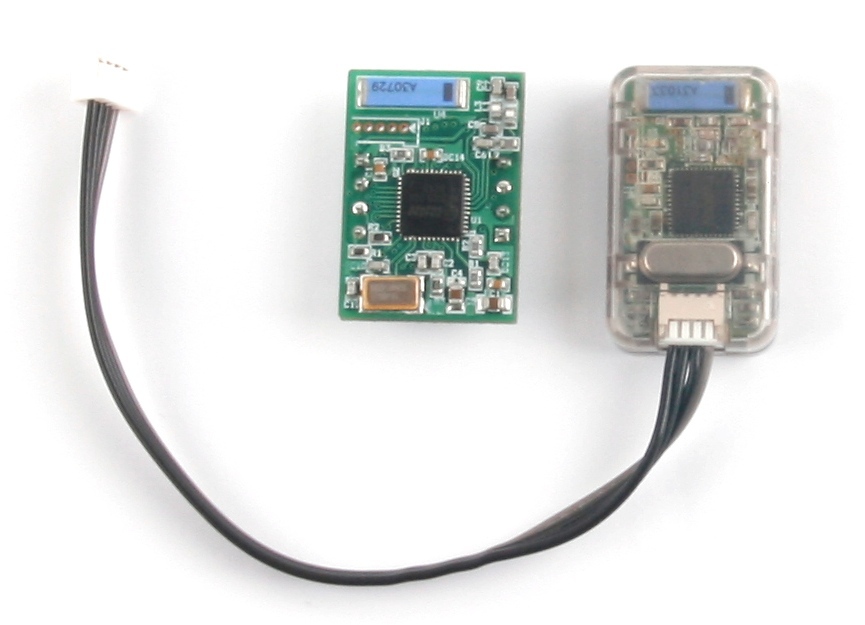
2. ZIG2Serial-スカーフ。これは、基本的にzigbeeモジュールから標準のrs-232へのアダプターです。
Zig2serial 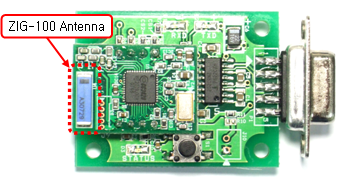
3. USB2Dynamixelは非常に興味深く有用なものです。 TTL、RS485、RS232-オプションの3つのモードで動作します。 このアダプターをUSBからRS232へのアダプターとして使用します。
USB2ダイナミクセル 
結果はこの設計です:
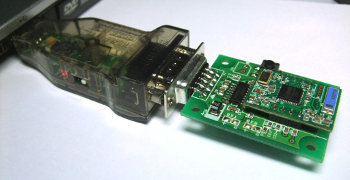
残る唯一のことは、ZIG-100 / 110Aの2つの「半分」の間に接続を確立し、LabViewの例の実装
コントローラーがZigBeeモジュールが接続されていることを理解し、コントローラーと接続された周辺機器との間でデータを交換するには、適切なファームウェアを書き込む必要がありました。 ファームウェアは、ネイティブのRoboPlus Taskを使用して作成されました。 ファームウェアを書き込むプロセスは次のとおりです。
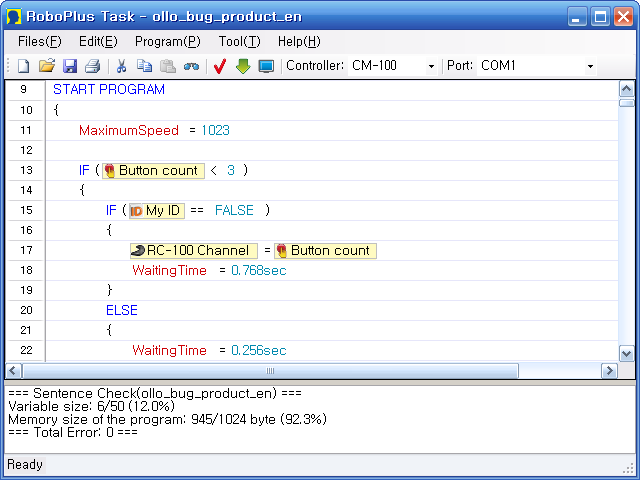
RoboPlus Taskからファームウェアコードを目に優しいコンパクトな形で引き出すことは不可能であるため、今後はファームウェアのスクリーンショットをアップロードしません。 さらに、開発プロセス自体は非常に直感的であり、特別な問題を引き起こすことはありません。 誰かがファームウェア自体に興味がある場合は、.tsk形式で追加します。
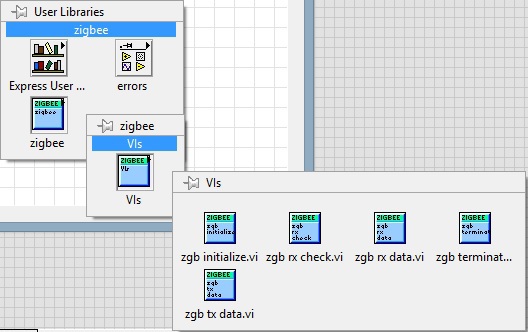
最初は、ZIG2Serialで動作するようにライブラリを自分で開発する必要があると想定されていましたが、Robotisの公式Webサイトで、古典的なImport Shared Library(.dll)を介してLabViewにシームレスに統合されるZigbee SDKを見つけました。 LV2010およびLV2012でこのプロセスを実行しました-統合の問題は見つかりませんでした。 その結果、ユーザーライブラリに別のパレットがあります。
LabViewの機能を実証するために、トレーニング例として以下を実装することが決定されました。
1. Zigbeeインターフェースを介してコントローラーに制御コマンドを送信します。
2.コントローラーに接続された赤外線センサーのアレイをポーリングします。
3.赤外線センサーの尋問。
4.ダイナミクセルサーボとの相互作用。
それでは、順番に始めましょう:
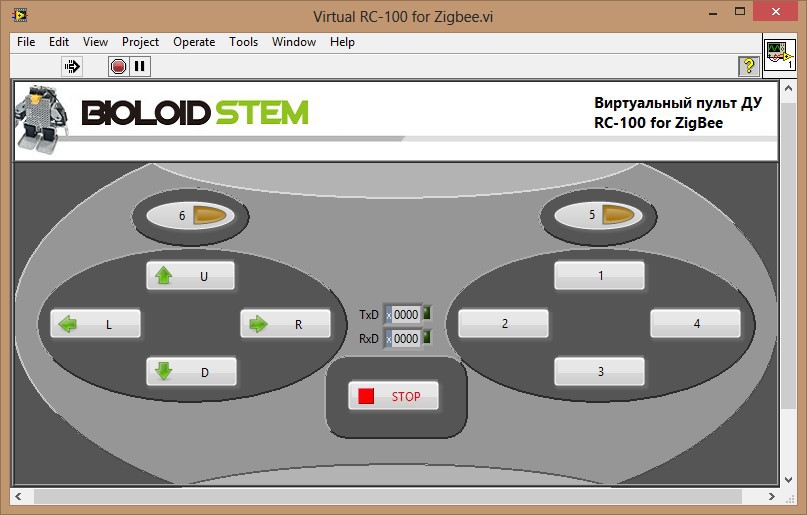
1. Zigbeeインターフェースを介してコントローラーに制御コマンドを送信します。
この例の制御コマンドとは、コントローラーがRC-100コントロールパネルから送信されたコマンドとして認識するコマンドを意味しますが、他の送信を妨げるものは何もありません。この場合、ファームウェアをさらに変更する必要があります。
RC-100リモコンの図と各ボタンに対応するコード 
この場合の動作原理は次のとおりです。com-port経由でアダプターに接続され、コントローラーにデータを転送します。 コントローラはそれらを解釈し、適切なコマンドをロボットのサーボに送信します。
Vi開発プロセス
このプログラムはいくつかの段階で実装されます。
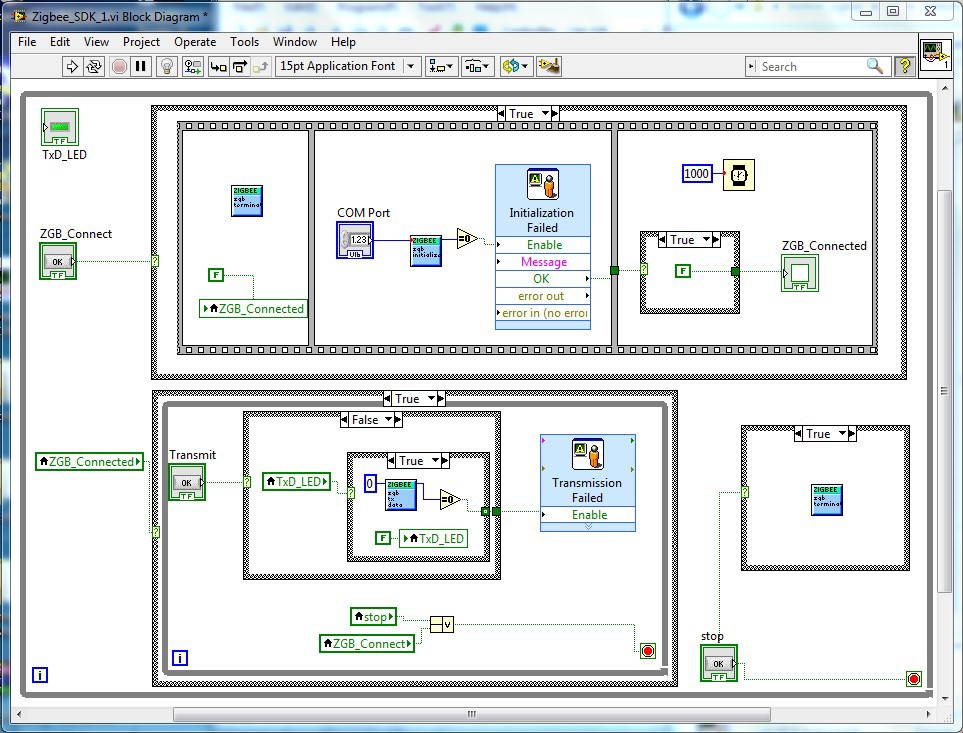
1.新しいブロック図を作成します。 その上に2つのケース構造構造、ZGB_Connectedという名前の円形LEDインジケーター、およびTxD_LEDという名前の正方形LEDインジケーターを配置します。 ZGB_Connectという名前のOKボタンを作成し、それを最初の構造のケースセレクター入力に接続します。 この[メカニカルアクション]ボタンの動作を[リリースされるまで切り替える]に設定します。 Trueウィンドウのこの構造内に、3つのウィンドウ(フレーム)を持つフラットシーケンス構造を配置します。
2. Zigbeeライブラリのzgb_terminate.vi関数を最初のウィンドウ内に配置します。 これは、前のセッションが正しく完了しなかった場合に、COMポートとのセッションを閉じるために実行する必要があります。 また、このウィンドウにローカル変数ZGB_Connectedを配置し、それに値FALSEを割り当てます。
3.次のウィンドウで、入力がCOMポートの数値制御に接続する関数zgb_initialize.viを配置し、値「0」と比較した出力が入力Enable-vi Display Msgに送信されます。 「表示するメッセージ」ウィンドウで、「初期化に失敗しました」と書き込みます。 このウィンドウでは、ZIG-100SerialとUSB2Dinamixelを使用してZIG-100モジュールが接続されているCOMポートとの接続が初期化されます。 接続が正常に初期化された場合、zgb_initialize.vi関数は値1を返し、接続が成功しなかった場合、値0と初期化失敗に関するメッセージを返します。
4.最後のウィンドウで、ケース構造を配置し、その入力をOK express-vi Display Msgの出力に接続します。 False定数をTrueウィンドウに、True定数をFalseウィンドウに配置し、ZGB_Connectedインジケーターに接続します。
5. Transmitという名前のOKボタンを作成します。 このメカニカルアクションボタンの動作を[リリースされるまで切り替える]に設定し、最初に作成した2つのケース構造の2番目に移動します。 ローカル変数を使用して、変数ZGB_Connectedの値を構造体の入力に渡します。 Trueウィンドウ内に、While Loopループを配置します。 ループ内に、入力が送信ボタンに接続されているケース構造を配置します。
6.構造体内に関数zgb_tx_data.viを配置します。その入力は送信する数値制御データに接続され、出力は値 "0"と比較して、構造外の入力express-vi Display Msgに送信されます。 「表示するメッセージ」ウィンドウで、「送信失敗」と書き込みます。 また、現在のケース構造のTrueウィンドウ内で、ローカル変数TxD_LEDをtrueに設定します。 このステップは、Zigbeeインターフェースを介してデータを送信するために必要です。
7.現在のケース構造のFalseウィンドウで、ローカル変数TxD_LEDの値を入力して別のケース構造を配置し、そのTrueウィンドウで、入力に値「0」を適用した関数zgb_tx_data.viを配置します。 これは、コマンドの再送信をフィルタリングするために必要です。
8. Whileループループを作成し、ブロックダイアグラム全体をその中に配置します。 [停止]ボタンを作成し、その動作を[リリース時に切り替え]に設定します。 停止ボタンと、最後に作成されたWhileループループのループ条件を接続します。 また、現在のWhileループループ内で、Case Structure構造体をTrueウィンドウに配置し、zgb_terminate.vi関数を配置します。 構造の入力を停止ボタンに接続します。
9.作成された最初のWhileループループに戻りましょう。 ローカル変数stopおよびZGB_Connectを論理OR演算と組み合わせることにより、演算の結果をこのループのループ条件に接続します。
1.新しいブロック図を作成します。 その上に2つのケース構造構造、ZGB_Connectedという名前の円形LEDインジケーター、およびTxD_LEDという名前の正方形LEDインジケーターを配置します。 ZGB_Connectという名前のOKボタンを作成し、それを最初の構造のケースセレクター入力に接続します。 この[メカニカルアクション]ボタンの動作を[リリースされるまで切り替える]に設定します。 Trueウィンドウのこの構造内に、3つのウィンドウ(フレーム)を持つフラットシーケンス構造を配置します。
2. Zigbeeライブラリのzgb_terminate.vi関数を最初のウィンドウ内に配置します。 これは、前のセッションが正しく完了しなかった場合に、COMポートとのセッションを閉じるために実行する必要があります。 また、このウィンドウにローカル変数ZGB_Connectedを配置し、それに値FALSEを割り当てます。
3.次のウィンドウで、入力がCOMポートの数値制御に接続する関数zgb_initialize.viを配置し、値「0」と比較した出力が入力Enable-vi Display Msgに送信されます。 「表示するメッセージ」ウィンドウで、「初期化に失敗しました」と書き込みます。 このウィンドウでは、ZIG-100SerialとUSB2Dinamixelを使用してZIG-100モジュールが接続されているCOMポートとの接続が初期化されます。 接続が正常に初期化された場合、zgb_initialize.vi関数は値1を返し、接続が成功しなかった場合、値0と初期化失敗に関するメッセージを返します。
4.最後のウィンドウで、ケース構造を配置し、その入力をOK express-vi Display Msgの出力に接続します。 False定数をTrueウィンドウに、True定数をFalseウィンドウに配置し、ZGB_Connectedインジケーターに接続します。
5. Transmitという名前のOKボタンを作成します。 このメカニカルアクションボタンの動作を[リリースされるまで切り替える]に設定し、最初に作成した2つのケース構造の2番目に移動します。 ローカル変数を使用して、変数ZGB_Connectedの値を構造体の入力に渡します。 Trueウィンドウ内に、While Loopループを配置します。 ループ内に、入力が送信ボタンに接続されているケース構造を配置します。
6.構造体内に関数zgb_tx_data.viを配置します。その入力は送信する数値制御データに接続され、出力は値 "0"と比較して、構造外の入力express-vi Display Msgに送信されます。 「表示するメッセージ」ウィンドウで、「送信失敗」と書き込みます。 また、現在のケース構造のTrueウィンドウ内で、ローカル変数TxD_LEDをtrueに設定します。 このステップは、Zigbeeインターフェースを介してデータを送信するために必要です。
7.現在のケース構造のFalseウィンドウで、ローカル変数TxD_LEDの値を入力して別のケース構造を配置し、そのTrueウィンドウで、入力に値「0」を適用した関数zgb_tx_data.viを配置します。 これは、コマンドの再送信をフィルタリングするために必要です。
8. Whileループループを作成し、ブロックダイアグラム全体をその中に配置します。 [停止]ボタンを作成し、その動作を[リリース時に切り替え]に設定します。 停止ボタンと、最後に作成されたWhileループループのループ条件を接続します。 また、現在のWhileループループ内で、Case Structure構造体をTrueウィンドウに配置し、zgb_terminate.vi関数を配置します。 構造の入力を停止ボタンに接続します。
9.作成された最初のWhileループループに戻りましょう。 ローカル変数stopおよびZGB_Connectを論理OR演算と組み合わせることにより、演算の結果をこのループのループ条件に接続します。
その結果、この例では、ブロック図は次のようになります。
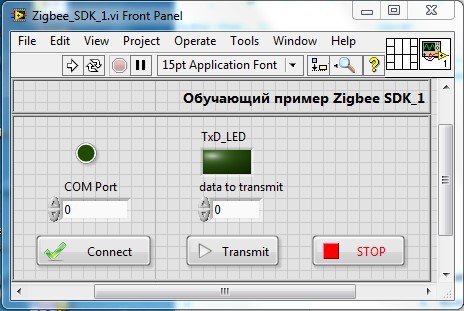
およびフロントパネル:
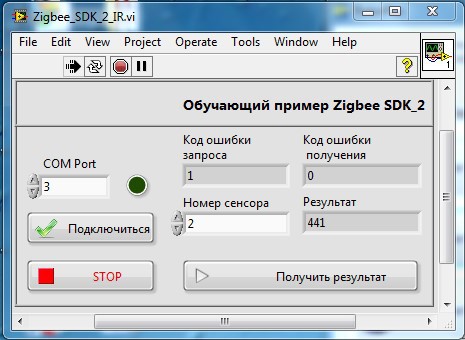
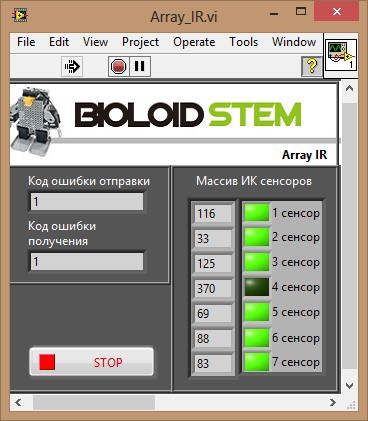
2.コントローラーに接続された赤外線センサーのアレイをポーリングします。
IRセンサーアレイセンサーのアレイをCM-530コントローラーに接続できます。
IRセンサーアレイ 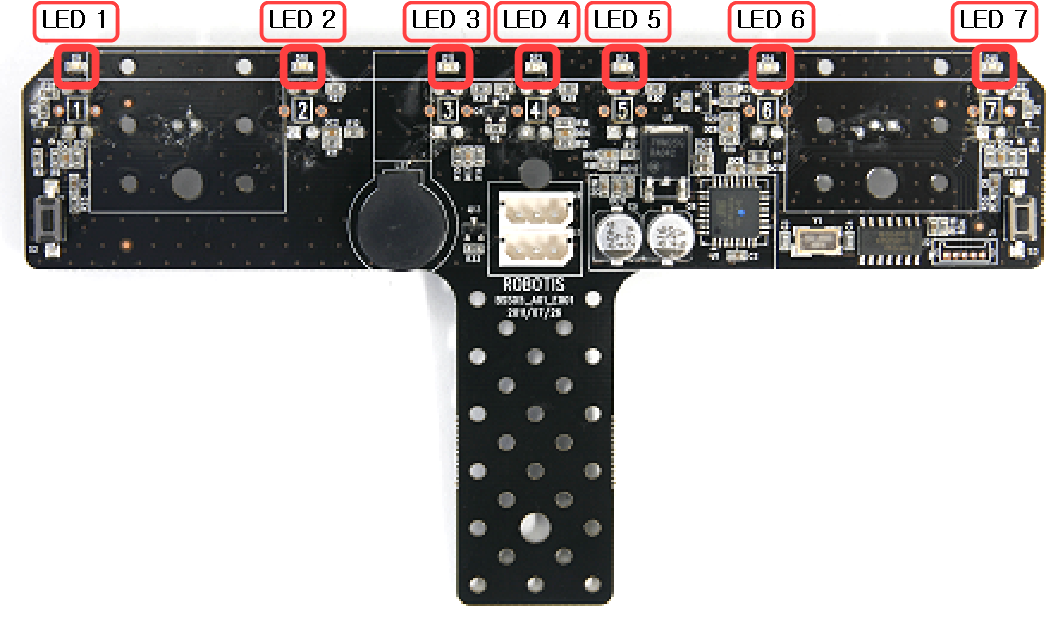
例として、オンデマンドで興味のあるセンサーをポーリングします。
この場合の動作原理は次のとおりです。アダプターを介してアダプターに接続し、目的のセンサーの番号をコントローラーに送信し、それに応答して値を取得します。
Vi開発プロセス
この演習を完了するには、次の方法で前のviを変更します。
1.コンテンツから作成した最初のループWhileループをクリアします。
2.内部にRequestという名前のケース構造とコントロール(コントロール)を作成します。 このコントロールをケース構造の入力に接続します。
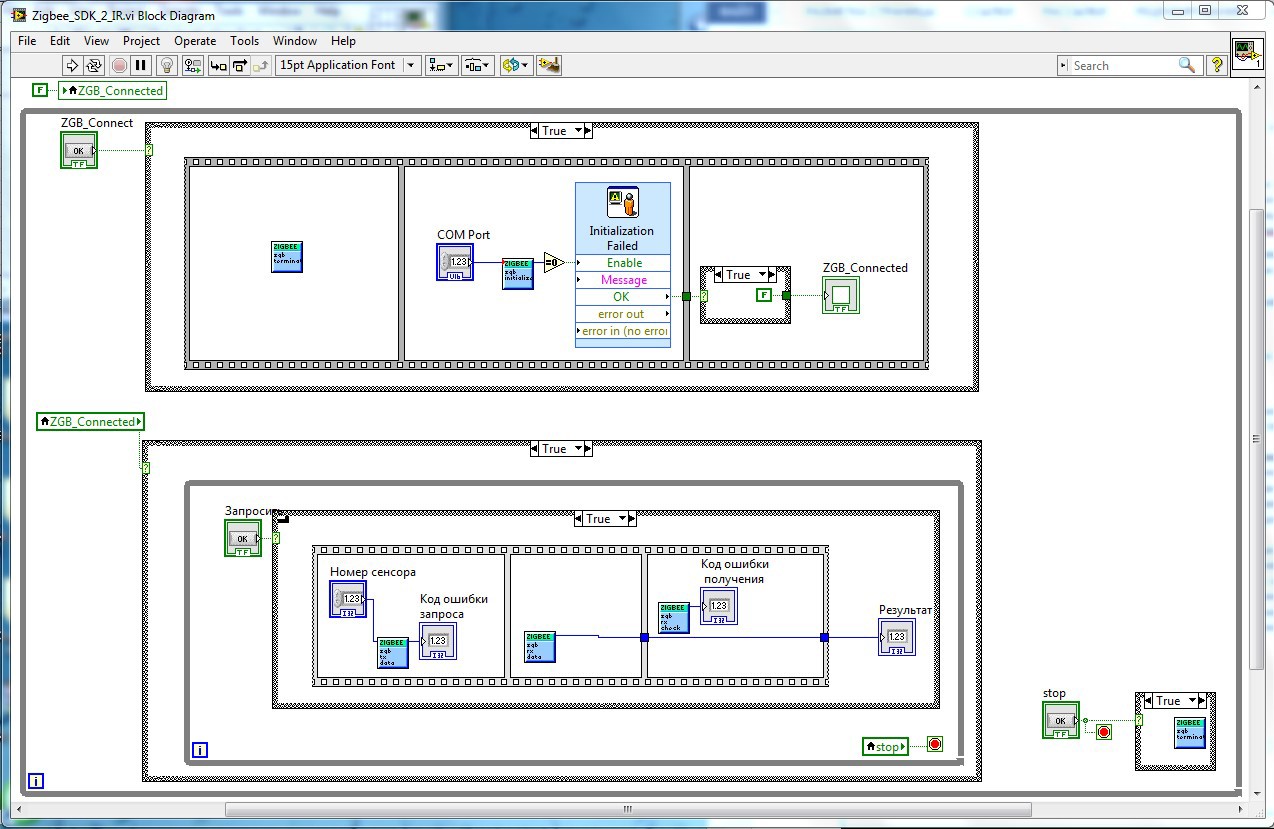
3. Trueウィンドウで、3つのウィンドウ(フレーム)を持つフラットシーケンス構造を配置します。 Zigbeeライブラリのzgb_tx_data.vi関数を最初のウィンドウ内に配置します。 この場合、この関数は、アレイから関心のあるセンサーの番号をコントローラーに送信します。 したがって、センサー番号という名前のコントロール(コントロール)と、リクエストエラーコードという名前のインジケーターを作成し、それぞれ、この関数の入力と出力に接続します。
4. 2番目のウィンドウ内に関数zgb_rx_data.viを配置します。 この関数は、Zigbeeインターフェースを介してこのコンピューターを受信します。 結果という名前のインジケーターを作成し、それを関数の出力に接続し、フラットシーケンス構造の3番目のウィンドウを通過させます。 3番目のウィンドウに関数zgb_rx_check.viを配置します。 この関数は、結果を出力します。 また、受信用のインジケータエラーコードを作成し、この関数の出力に接続します。
1.コンテンツから作成した最初のループWhileループをクリアします。
2.内部にRequestという名前のケース構造とコントロール(コントロール)を作成します。 このコントロールをケース構造の入力に接続します。
3. Trueウィンドウで、3つのウィンドウ(フレーム)を持つフラットシーケンス構造を配置します。 Zigbeeライブラリのzgb_tx_data.vi関数を最初のウィンドウ内に配置します。 この場合、この関数は、アレイから関心のあるセンサーの番号をコントローラーに送信します。 したがって、センサー番号という名前のコントロール(コントロール)と、リクエストエラーコードという名前のインジケーターを作成し、それぞれ、この関数の入力と出力に接続します。
4. 2番目のウィンドウ内に関数zgb_rx_data.viを配置します。 この関数は、Zigbeeインターフェースを介してこのコンピューターを受信します。 結果という名前のインジケーターを作成し、それを関数の出力に接続し、フラットシーケンス構造の3番目のウィンドウを通過させます。 3番目のウィンドウに関数zgb_rx_check.viを配置します。 この関数は、結果を出力します。 また、受信用のインジケータエラーコードを作成し、この関数の出力に接続します。
その結果、ブロック図は次のようになります。
およびフロントパネル:
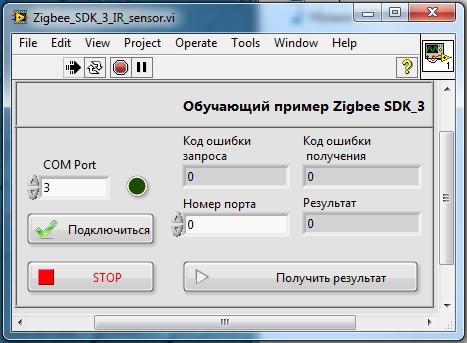
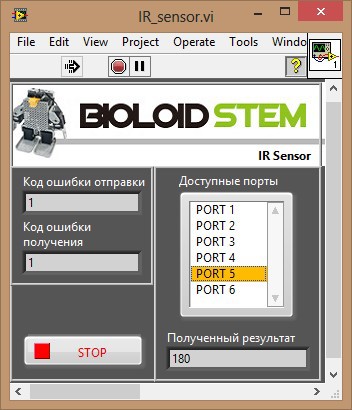
3.赤外線センサーの尋問。
IRセンサーのアレイに加えて、個別のIRセンサーをコントローラーに接続できます。
IRセンサー 
この例の実装は、前の実装の実装とそれほど違わないため、開発プロセスで停止しないようにします。最後に何が起こったのかを示します。
ブロック図は次のとおりです。
フロントパネル:
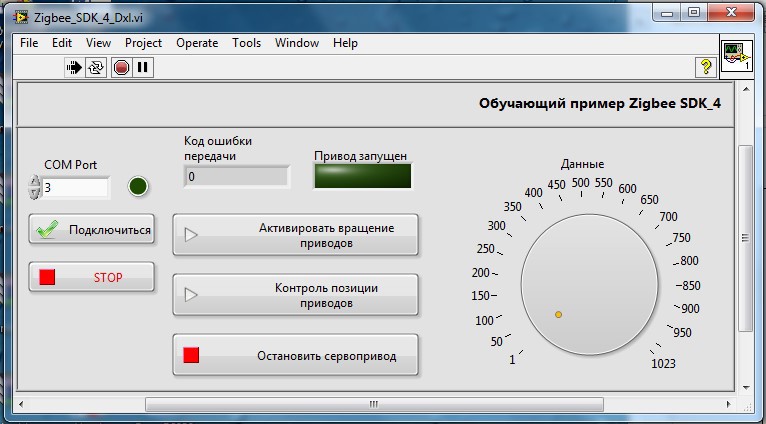
4.ダイナミクセルサーボとの相互作用。
Bioloid STEMキットには2つのダイナミクセルAX-12Aサーボが含まれており、ジョイントとホイールの2つのモードで作業できます。 ホイールモードでは、サーボは回転モーターとして機能し、メインインジケーターは回転速度です。 ジョイントモードでは、サーボはヒンジとして機能し、その主な指標は初期位置からの一定量の偏差です。 動作モードは、RoboPlus Managerを介して切り替えられます。 この例の特徴は、Zigbeeインターフェースを介したコントローラーとの継続的な交換です。 これを行うために、ブロック図に並列whileループが追加されました。 動作モード(ドライブの回転またはその偏差の制御)を選択した後、データは継続的にコントローラーに送信されます。データは1〜1023の整数値です。ホイールモードの場合、このデータは速度値、ジョイントモードの場合-ゼロからのドライブ位置の偏差の値です。
ブロック図は次のとおりです。

フロントパネル:
その結果、これらの例は、当社が提供するロボット工学の基礎に関するトレーニングコースに含まれていました。
おわりに
さて、結論として、かなり原始的な例の開発がそこで終わったわけではないと言いたいと思います。 セットに「すばやく」慣れるために、デモアプリケーションが開発されました。これには、上記の例に基づく「思いやり」機能、および「有線」動作モードでサーボを制御および設定する高度な機能が含まれています。


開発中の主な情報源はwww.robotis.com-メーカーの公式ウェブサイトでした。