はじめに
私の意見では、世界に存在するほとんどすべてのマイクロコントローラーのプログラミングを迅速に学習するには、技術文書の学習に加えて、C言語を習得し、JTAGデバッグを使用する必要があります。 私の考えを説明します。 C言語コンパイラは、既存のほとんどすべてのマイクロコントローラーに対応しています。 そのため、言語Cはクロスプラットフォームアセンブラーとしての地位を確立しています。 彼の知識により、マイクロコントローラの新しいファミリごとにアセンブリ手順を学ぶ必要がなくなります。 JTAGデバッグは、インサーキットエラー検索の可能性を提供するだけでなく、内部からマイクロコントローラーを調査するのにも役立ちます。 単純なマイクロコントローラでさえデバッグせずに単純にプログラミングする場合、入力と出力を備えたブラックボックスとしてシステムの研究にアプローチすることは誰にとっても明らかだと思います。 このアプローチは、特に初期段階では、学習を困難にします。 一方、JTAGを使用すると、内部に入り、プログラムが段階的に実行される方法を確認し、メモリとレジスタで何が起こるかを確認し、ブレークポイントへの興奮を開始し、プログラムの逆アセンブルされたバージョンを実行できます。 この機能により、学習を大幅にスピードアップできます。
AVR、STM8、MSP430、AVR32、STM32、EFM32、Renesas RXなどのマイクロコントローラーには、C言語コンパイラとJTAGインターフェイスを使用したデバッグがあります。 これらの多くのマイクロコントローラーの単一のクロスプラットフォーム環境は、Embedded Workbenchです。 環境は有料ですが、30日間の無料バージョンまたはコードサイズ制限のあるバージョンを使用することができます。 今月の新しい家族の最初の研究のために十分かもしれません。 その後、家族について決心し、無料のツールで家族と一緒に仕事を続けるか、小規模プロジェクトの場合はサイズが制限されているバージョンのコードを使用するかを決定できます。 大規模な商用製品の場合は、この媒体も購入できます。
また、AVR、STM8、MSP430ファミリーで学習を開始することをお勧めします。 これらのマイクロコントローラの動作は、比較的単純なコマンドシステム、少数のプロセッサレジスタおよび周辺機器を備えているため、理解が容易です。 簡単な例を作成し、徐々に独自のライブラリを作成することから始めた方が良いでしょう。 これはすべて頭でよく覆われています。 最初の知り合いにとって、これは非常に成功しています。
以下で説明する例では、AVRがマイクロコントローラの世界で最も人気のあるファミリであるため、AVRを選択しました。 始めるのは簡単だと思いますが、それに限定するべきではありません。
JTAGデバッガーの選択
Cで記述されたプログラムのインサーキットデバッグには、AVRマイクロコントローラー用のJTAGデバッガーが必要です。 最も手頃な価格で製造が容易なのは、AVR JTAGICE独自のデバッガーのクローンです。 このようなクローンは、 eBayで低価格で注文できます。 品質は宝くじのようなものです。

クローンは、たとえばOlimexによっても生成されます 。 COMポートを介してコンピューターに接続するクラシックバージョンと、USBインターフェイスを介した接続の新しいバージョンがあります。

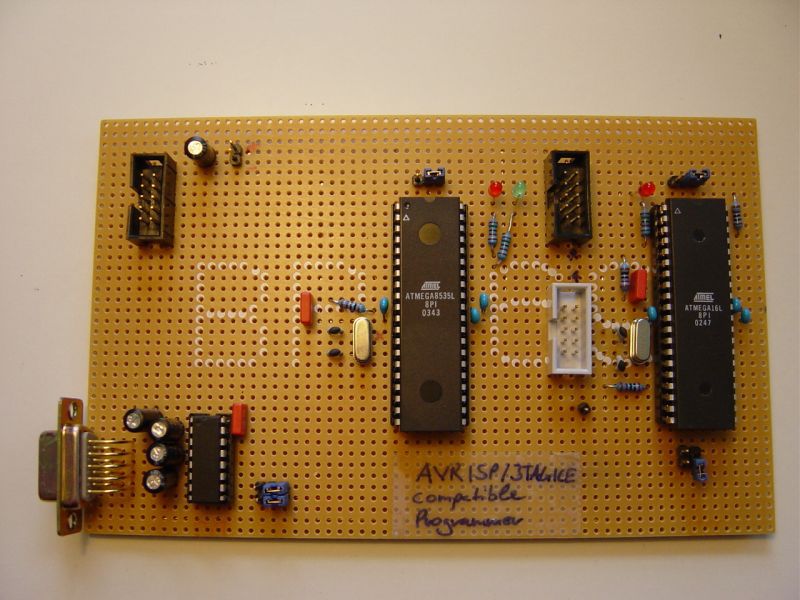
このようなクローンの個人生産では、独自のプリント基板を作成できない場合、DIPコンポーネントのみを使用できるため、インストールが簡単になります。 JTAGICEクローンを含む初期バージョンのEvertoolは 、そのようにして作成されました。
 ]
]
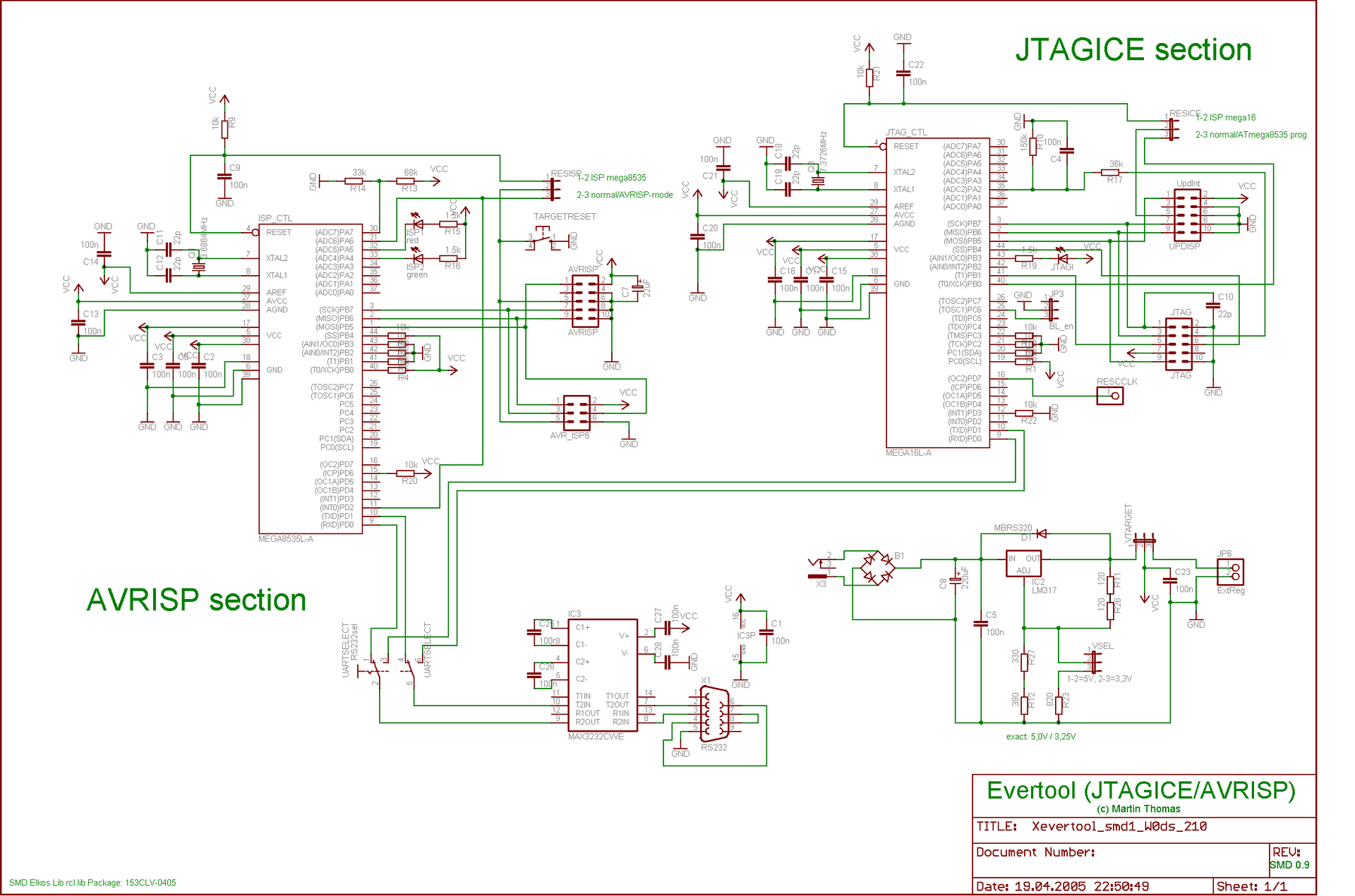
ほとんどのJTAGICEクローンは、次の図に示す図に基づいています。 より正確には、JTAGICEセクションと呼ばれる部分です。 デバッガーのコアはAtmega16Lマイクロコントローラーです。 JTAGICEクローンをUSB経由で接続したい場合は、 MAX3232レベル変換チップをFTDI FT232チップに変更します。 ただし、FT232はDIPパッケージでリリースされておらず、このチップを搭載したDIPモジュールの価格は非常に高くなっています。 したがって、ここでは、1つの回路基板とDIPコンポーネントだけで降りることはできません。 細いワイヤーでFT232をブレッドボードにはんだ付けするか、塩素を含む通常のフットプリントで単層のプリント回路基板をエッチングする必要があります。
ファームウェアは、AVR Studio 4のインストールフォルダーにあるか、 ここからダウンロードできます 。
上記のJTAGICEクローンの欠点は、 AVR Studio 6でサポートされていないことです。 ただし、AVR Studio 4の古いバージョンとAVR用IARの古いバージョンと新しいバージョンでは、これらのクローンは十分にサポートされています。
後で書かれたCコード例をデバッグするために、このスキームに従って作成されたクローンを使用しました。 その中のMAX3232チップは、本質を変えないADM3202の代替品です。
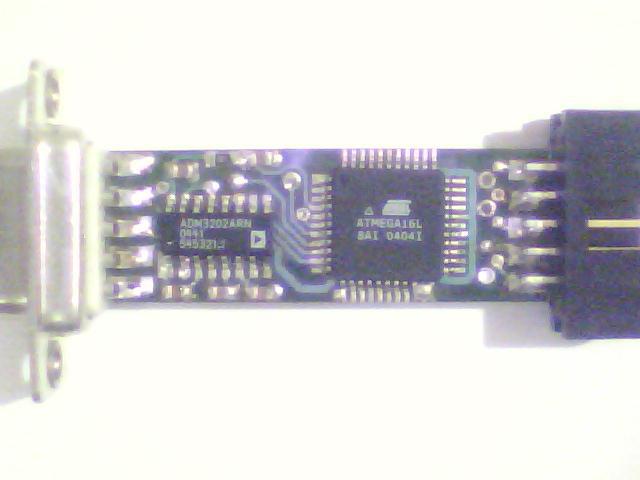
JTAGICEのこのクローンは私に引き継がれました。 私は職場で電子廃棄物の入った箱を見つけました。 うまくいかなかったので、再フラッシュすることにしました。 写真に見られるように、Atmega16LをプログラミングするためのAVR ISPコネクタはサイズを縮小するために出力されないため、なぜ特別なアダプタを作成する必要がありましたか。 ファームウェアの後、JTAGICEは「死後の世界」の寿命を獲得し、獲得しました。
COMポートが時代遅れになった今、私は「旧友」を捨てず、USB-RS-232ケーブルコンバーターを購入しました 。

デバッグボード
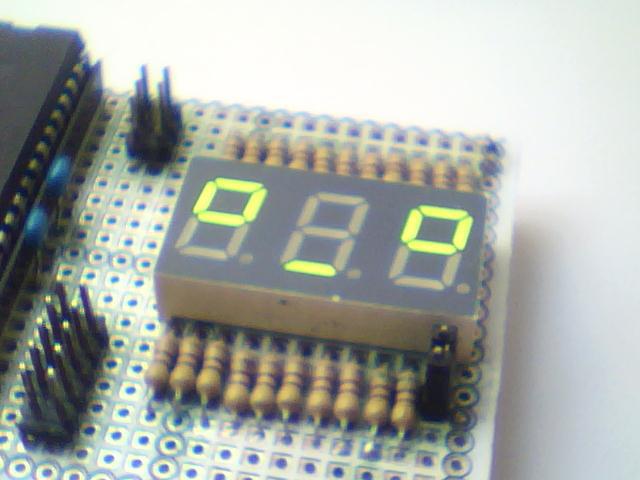
デバッグボードとして、ブレッドボードに組み立てたデジタル温度計を使用します。 ボードはUSBで駆動され、コアはDIPパッケージのAtmega16マイクロコントローラーです。 マイクロコントローラーは、周波数が16 MHzの水晶振動子からクロックを供給され、必要最小限の受動部品のセット(水晶の場合は22 pFコンデンサ、リセットラインを電源にプルするための10kΩ抵抗、電源の場合は0.1μFコンデンサ)で結ばれます。 マイクロコントローラの標準プログラミングおよびデバッグ用に、2つの標準6ピンAVR ISPおよび10ピンAVR JTAGソケットが取り付けられています。 ボードには、アナログ温度センサー、3桁の静的7セグメントインジケータ、および追加のLEDがあります。 表示LEDおよびインジケータセグメントは、500オームの電流制限抵抗器を介してマイクロコントローラに接続されています。 3つの7セグメントインジケーターはそれぞれ、ポートA、B、Dのいずれかの端子0から6に接続されます。LEDはポートDの7番目の端子に接続されます。アナログセンサー出力はポートAの7番目の端子に接続されます(内蔵ADCのチャンネル7 )
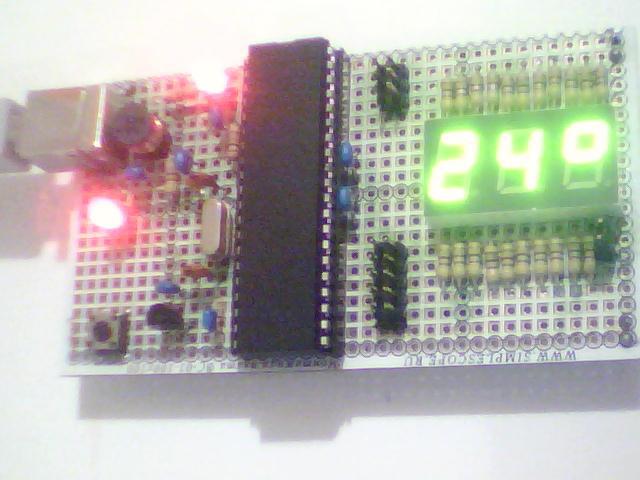
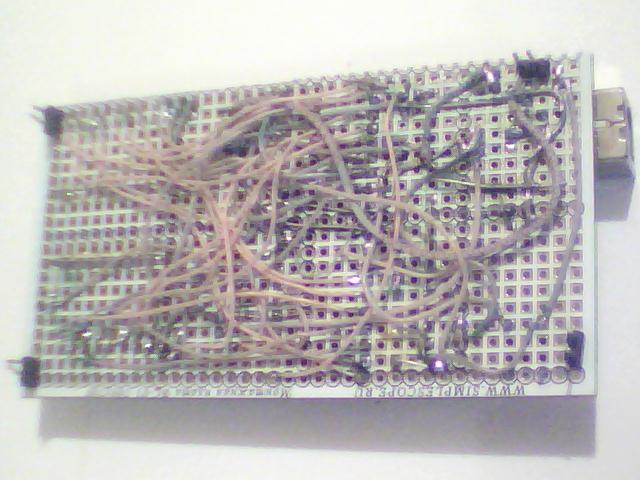
すべての要素はMGTFワイヤではんだ付けされました。
IAR開発環境
プログラムの作成とデバッグには、Atmel AVR環境用のIAR Embedded Workbench、つまりコードサイズ制限が4 Kbの無料バージョンを使用します。 AVRファミリーのマイクロコントローラー用のC言語の小さなプロジェクトの場合、これで十分です。
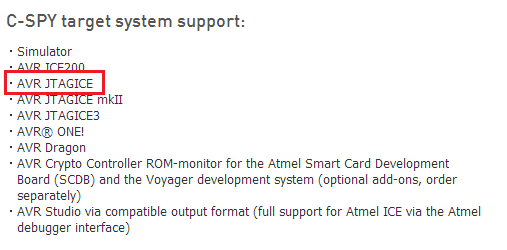
ここに行って、現在のAVR用IARの最新バージョンが提供するものを読んでみましょう。 前述のJTAGICEデバッガーは、以前と同様にサポートされています。
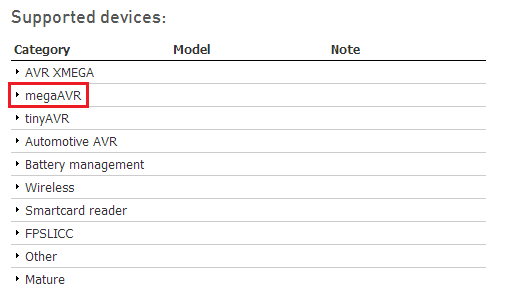
サポートされるファミリのリストには、megaAVRが含まれます。
JTAGデバッガーとデバッグボードが動作することを確認した後、IARをダウンロードします 。
インストーラーを使用すると、キックスタートライセンスに登録できます。
インストール後、IARを登録するには、登録フォームに記入する必要があります。
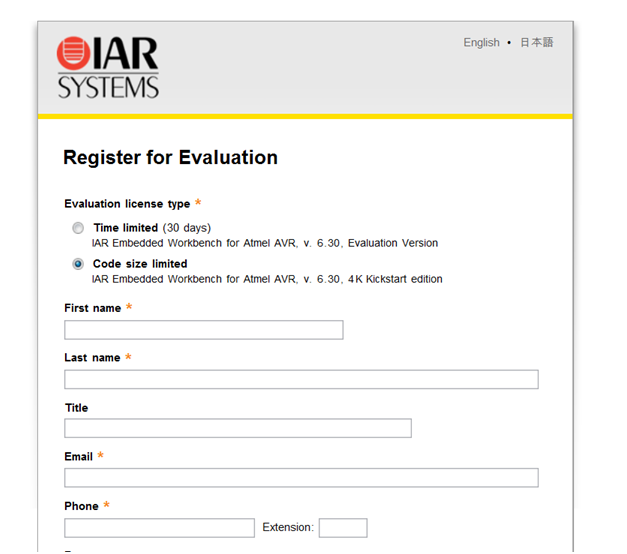
アンケートへの記入後、キーがメールに届きます。キーを入力すると、無料の登録済みキックスタートバージョンが無制限に届きます。

タスク用の空のプロジェクトを作成します。 AVR Studio 4を使用して出力16進ファイルをフラッシュする必要がある場合に備えて、C言語とオプションAVR Studio 4互換出力を選択します。
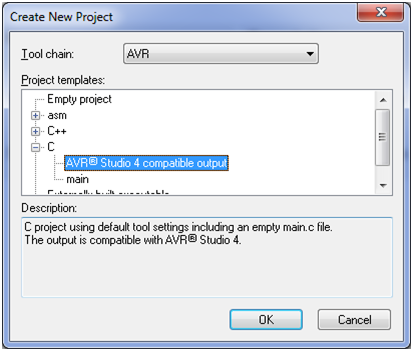
言語を選択すると、完全に空のほぼ空のソースファイルが表示されます。
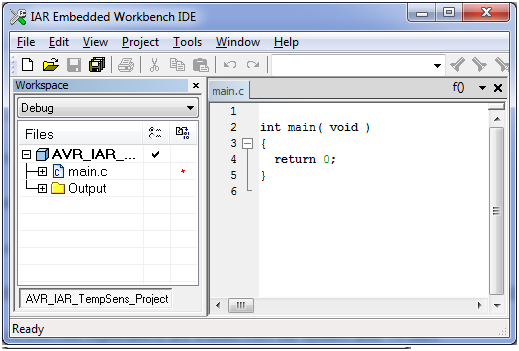
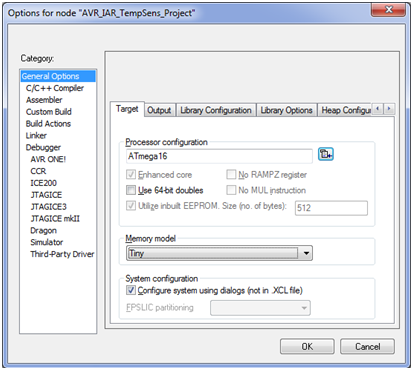
プロジェクトの設定に移りましょう。 なぜなら Atmega16のプログラムを作成し、プロセッサー構成の列でこのマイクロコントローラーを選択します。
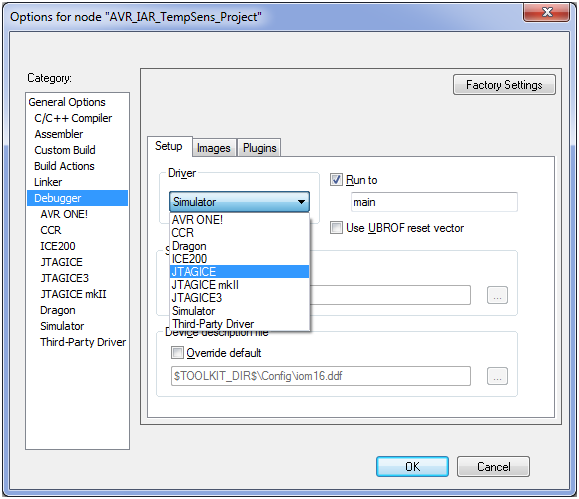
[デバッガ]メニュー項目で、[JTAGICE]を選択します。
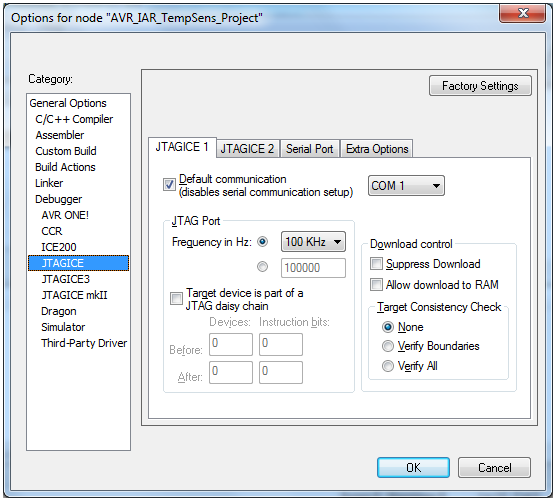
デバッガー-> JTAGICEのメニュー項目で、デバッガーが接続されているCOMポート番号を選択します。
環境ライブラリー内のマイクロコントローラーの周辺レジスターの重要なビットの定義を正しく動作させるには、以下も行う必要があります。
[全般オプション]-> [システム]メニュー項目の[I / O-Include files]チェックボックスでビット定義を有効にします。

プログラミングとデバッグ
例の説明を始める前に、IAR環境のいくつかの機能を説明する必要があります。 Atmega16のレジスタアドレス定義を含むiom16.hヘッダーファイルには、次のように内部周辺レジスタの特定のビットにアクセスできるマクロが含まれています。
... * Examples of how to use the expanded result: * TCCR2 |= (1<<5); * or if ENABLE_BIT_DEFINITIONS is defined * TCCR2 |= (1<<COM21); * or like this: * TCCR2_Bit5 = 1; * or like this: * TCCR2_COM21 = 1; ***************************************************************************/
実際、これらのオプションのいずれかを使用できます。 実際、ここでの選択は、特定のオプションを使用することの利便性と、書かれている内容のその後の理解の単純さです。
IAR環境では、__ delay_cycles(x)組み込み遅延関数を使用できます。xはティック単位の遅延時間です。 この場合、1クロックサイクルの遅延は1/16000000 = 62.5 nsです。
これらの2つのポイントがわかったので、排他的論理和を使用してLEDが単純に点滅する最初の例に進みます。
/* */ #include <ioavr.h> #include <intrinsics.h> /* */ // #define F_CPU 16000000 /* */ // #define DELAY_US(us) __delay_cycles((F_CPU / 1000000) * (us)); // #define DELAY_MS(ms) __delay_cycles((F_CPU / 1000) * (ms)); /* */ // void main( void ) { // // // 7- D DDRD_DDD7 = 1; // 7- D "0" PORTD_PORTD7 = 0; // for(;;) { // 7- D "0" "1" "1" "0" // PORTD_PORTD7 ^= 1; // DELAY_MS(1000); }//end for }
必要な期間の遅延の形成を簡素化するために、遅延マクロ関数DELAY_US(us)およびDELAY_MS(ms)を作成します。これにより、サイクルではなくマイクロ秒およびミリ秒単位で遅延を設定できます。 次に、メイン()プログラムのメイン関数に移動します。この関数は、マイクロコントローラーをオンにした後、またはリセット後に取得します。 スイッチを入れた後に最初にすべきことは、このケースでは動作に必要な周辺ブロックを構成することです。これはポートDの1つのピンのみです。ピンに構成するには、DDRDデータ方向レジスタのDDD7ビットを1に設定するだけです。 足に「1」(5 V)を設定するには、PORTDデータレジスタのPORTD7ビットを設定する必要があります。足に「0」(グランド)を設定するには、PORTD7ビットをリセットする必要があります。 詳細については、 データシートをご覧ください。
制御レジスタDDRDおよびPORTDのビットを設定および書き込むために、ビット単位の分離および結合なしで単に書き込む(DDRD = 0x01、DDRD = 0x00)のは望ましくありません(DDRD | = 0x01、DDRD&=〜0x01、DDRD | =(1 << 0)、 DDRD&=〜(1 << 0))。これにより、この操作の前に設定されたレジスタの残りのビットが消去されるためです。 これを理解することが重要です。
調整後、メインの無限for(;;)ループに入ります。このループでは、原則として、メインプログラムロジックが実行されます。 マイクロコントローラプログラムを実装するこのようなモデルは、スーパーサイクルシステムと呼ばれます。 この無限サイクルは、周辺ユニットの処理の中断中および低消費電力モードへの切り替え中は一時停止され、マイクロコントローラーがリセットされてオフになった場合にのみ停止します。
メインの無限ループでは、orを除くビット演算を使用して、「0」から「1」へ、次に「1」から「0」への一定の切り替えがあります。 これは、マクロ関数DELAY_MS(ms)によって提供される1秒の遅延で発生します。
次に、JTAGICEを使用してこの例をロードしてデバッグします。 これを行うには、[プロジェクト]-> [ダウンロードとデバッグ]メニュー項目をクリックするか、Ctrl + Dキーを押すか、赤い三角形のアイコンをクリックします。その後、コードに構文エラーがない場合、ステップバイステップのコマンドを使用できるデバッグモードに切り替えます。オーバー、ステップイン、ステップアウト、次のステートメント、移動、リセット。 さらに、ブレークポイントを使用する可能性があります。 これにより、プログラムをステップごとに実行し、ポートDのプロセッサレジスタとDDRDおよびPORTDレジスタの各ステップで何が起こるかを確認し、実行してから停止し、ブレークポイントまで開始できます。 これはすべて、エラーを見つけるためのツールを提供するだけでなく、マイクロコントローラーの動作をよりよく理解するのにも役立ちます。 彼とより速く働くことを学びなさい。
2番目の例もLEDの点滅ですが、追加のマクロ機能を使用しています。
/* */ #include <ioavr.h> #include <intrinsics.h> /* */ // #define F_CPU 16000000 // #define DELAY_TIME 1000 // // #define LED_DDR DDRD #define LED_PORT PORTD #define LED_PIN DDD7 /* */ // #define LED_INIT() ( LED_DDR |= (1<<LED_PIN) ); // #define LED_LOW() ( LED_PORT &=~ (1<<LED_PIN) ); // #define LED_HIGH() ( LED_PORT |= (1<<LED_PIN) ); // #define LED_TOG() ( LED_PORT ^= (1<<LED_PIN) ); // #define DELAY_US(us) __delay_cycles((F_CPU / 1000000) * (us)); // #define DELAY_MS(ms) __delay_cycles((F_CPU / 1000) * (ms)); /* */ // void main( void ) { // // LED_INIT(); // LED_LOW(); // for(;;) { // LED_TOG(); // DELAY_MS(DELAY_TIME); }//end for }
マクロ関数アプローチは、2つの方法で便利になります。 1つは、コードの可読性を向上させることです。 2つ目は、可能な修正の簡素化です。 ここで、LEDを別のポートの別のピンに再構成する必要がある場合は、LED_DDR、LED_PORT、LED_PINの3つの定義を変更し、プログラムテキスト全体を修正しないでください。 ライブラリを書くとき、これは人生を大いに単純化します。
3番目の例は、ステートマシンを使用した点滅LEDの実装です。 ステートマシンは、現在の状態に応じてエンドレスサイクルがブランチに分割されるマイクロコントローラーファームウェアモデルを実装するためのオプションの1つです。
/* */ #include <ioavr.h> #include <intrinsics.h> /* */ // #define F_CPU 16000000 // #define DELAY_TIME_LF 1000 #define DELAY_TIME_AF 500 #define DELAY_TIME_HF 100 // #define LIMIT_CNT_LF 4 #define LIMIT_CNT_AF 8 #define LIMIT_CNT_HF 40 // #define UCHAR unsigned char // #define STATE_LOW_FREQ_BLINK 0 #define STATE_AVR_FREQ_BLINK 1 #define STATE_HIGH_FREQ_BLINK 2 // // #define LED_DDR DDRD #define LED_PORT PORTD #define LED_PIN DDD7 /* */ // #define LED_INIT() ( LED_DDR |= (1<<LED_PIN) ); // #define LED_LOW() ( LED_PORT &=~ (1<<LED_PIN) ); // #define LED_HIGH() ( LED_PORT |= (1<<LED_PIN) ); // #define LED_TOG() ( LED_PORT ^= (1<<LED_PIN) ); // #define DELAY_US(us) __delay_cycles((F_CPU / 1000000) * (us)); // #define DELAY_MS(ms) __delay_cycles((F_CPU / 1000) * (ms)); /* */ // UCHAR curr_state = STATE_LOW_FREQ_BLINK; // // UCHAR state_cnt = 0; /* */ // void main( void ) { // // LED_INIT(); // LED_LOW(); // for(;;) { // switch(curr_state) { // case STATE_LOW_FREQ_BLINK: // LED_TOG(); // DELAY_MS(DELAY_TIME_LF); // state_cnt++; // //, if (state_cnt==LIMIT_CNT_LF) { curr_state = STATE_AVR_FREQ_BLINK; // state_cnt = 0; }//end if break; // case STATE_AVR_FREQ_BLINK: // LED_TOG(); // DELAY_MS(DELAY_TIME_AF); // state_cnt++; // //, if (state_cnt==LIMIT_CNT_AF) { curr_state = STATE_HIGH_FREQ_BLINK; // state_cnt = 0; }//end if break; // case STATE_HIGH_FREQ_BLINK: // LED_TOG(); // DELAY_MS(DELAY_TIME_HF); // state_cnt++; // //, if (state_cnt==LIMIT_CNT_HF) { curr_state = STATE_LOW_FREQ_BLINK; // state_cnt = 0; }//end if break; } }//end for }
この例では、STATE_LOW_FREQ_BLINK、STATE_AVR_FREQ_BLINK、STATE_HIGH_FREQ_BLINKの3つの状態があり、それぞれ低周波数、中周波数、高周波数のLEDの点滅に対応しています。 各状態には、各状態パスで実行される独自の遅延値DELAY_TIME_LF、DELAY_TIME_AF、DELAY_TIME_HFがあります。 各状態にある同じ期間は、LIMIT_CNT_LF、LIMIT_CNT_AF、LIMIT_CNT_HFの定義によって提供され、各状態の切り替えパスの数を決定します。 switchステートメントは、curr_state変数の現在の値に従って状態間の切り替えを提供します。 state_cnt変数は、状態切り替え制限に達するまで、各状態パスで増分されます。 ifステートメントは、切り替え制限に達したかどうかを判別します。 制限に達すると、次の状態への遷移が発生し、state_cntパスカウンターがリセットされます。
デバッグ中に、上記で既に説明したことに加えて、View-> Watchでcurr_stateとstate_cnt変数の値を見ることができます。
4番目の例は、マイクロコトローラーの8ビットタイマー(TIMER0)を使用することを目的としています。 この例では、ポートDの6番目のピンに接続された7セグメントインジケーターセグメントの1つが2番目のLEDとして使用されます。
/* */ #include <ioavr.h> #include <intrinsics.h> #include <ina90.h> /* */ // #define F_CPU 16000000 // #define TCNT0_VALUE 99 // #define T0_TICK_CNT_LIMIT 100 // #define UINT unsigned int /* */ // #define DELAY_US(us) __delay_cycles((F_CPU / 1000000) * (us)); // #define DELAY_MS(ms) __delay_cycles((F_CPU / 1000) * (ms)); /* */ // T0 UINT T0_tick_cnt=0; /* */ // void main( void ) { // // // 6- D DDRD_DDD6 = 1; // 6- D "0" PORTD_PORTD6 = 0; // // 7- D DDRD_DDD7 = 1; // 7- D "0" PORTD_PORTD7 = 0; // ( Normal) TCCR0_CS02=1;// 16 000 000 TCCR0_CS01=0;// 16 000 000 / 1024 = 15 625 TCCR0_CS00=1;// 1 / 15 625 = 0,000064 =64 TCNT0 = TCNT0_VALUE; // 156 * 0,000064 c = 0,009984 c (10 ) // 255-156 = 99 TIMSK_TOIE0=1; // // _SEI(); // for(;;) { // _NOP(); // 6- D "0" "1" "1" "0" // PORTD_PORTD6 ^= 1; // DELAY_MS(500); }//end for } /* T0 */ #pragma vector=TIMER0_OVF_vect __interrupt void ISR_TickTimer(void) { // _NOP(); // T0 T0_tick_cnt++; // 1 if (T0_tick_cnt >= T0_TICK_CNT_LIMIT) { // T0 T0_tick_cnt=0; // 7- D "0" "1" "1" "0" // PORTD_PORTD7 ^= 1; } // // TCNT0=TCNT0_VALUE; }//end func
この例では、メイン()関数で、LEDを設定した後、TCCRO制御レジスタのビットを設定することで構成されるゼロタイマーが設定されます。 なぜなら 通常のタイマーモードを使用する場合、ビットWGM00およびWGM01はゼロになります。 初期値はすでにゼロであるため、それらには触れません。 ビットCS00、CS01、CS02は、16 MHzのクロック周波数の最大分周器(1024)を取得するように設定されます。
分割後、タイマーの周波数は15625 Hzになります。これは64μsのティックに対応します。 ティックに156(156 * 0.000064 c = 0.009984 c = 10ミリ秒)を掛けると、10ミリ秒に最も近くなります。 したがって、10 msごとにオーバーフローイベントを処理するための割り込み生成を受信するには、レジスタ99(255-156 = 99)をカウントTCNT0にロードする必要があります。 なぜなら タイマーは99からカウントを開始し、255に達すると割り込みが生成され、156ティックのパスを取得します。
さらにこの例では、ゼロタイマーのオーバーフローに対する割り込みを生成するために、TIMSK割り込みマスキングレジスタのTOIE0ビットが設定されます。 その後、マクロ関数_SEI()を使用して、すべてのマスクされた割り込みのグローバルな解決を行います。
すべての割り込みベクトルの定義は、iom16.hヘッダーファイルにあります。
/*==============================*/ /* Interrupt Vector Definitions */ /*==============================*/ /* NB! vectors are specified as byte addresses */ #define RESET_vect (0x00) #define INT0_vect (0x04) #define INT1_vect (0x08) #define TIMER2_COMP_vect (0x0C) #define TIMER2_OVF_vect (0x10) #define TIMER1_CAPT_vect (0x14) #define TIMER1_COMPA_vect (0x18) #define TIMER1_COMPB_vect (0x1C) #define TIMER1_OVF_vect (0x20) #define TIMER0_OVF_vect (0x24) #define SPI_STC_vect (0x28) #define USART_RXC_vect (0x2C) #define USART_UDRE_vect (0x30) #define USART_TXC_vect (0x34) #define ADC_vect (0x38) #define EE_RDY_vect (0x3C) #define ANA_COMP_vect (0x40) #define TWI_vect (0x44) #define INT2_vect (0x48) #define TIMER0_COMP_vect (0x4C) #define SPM_RDY_vect (0x50)
プログラムのロジックは、メインループと割り込みハンドラーの準並列動作を提供するスーパーサイクルを備えたシステムの最初の例で既に説明されています。 メインループでは、ポートDの6番目のピンが500 msの周期で切り替えられます。 メインループは10ミリ秒ごとに中断され、ゼロタイマーオーバーフローによる割り込みを処理します。 処理は、このイベントで呼び出されるISR_TickTimer()ハンドラー関数を使用して実行されます。 この関数では、変数T0_tick_cntをインクリメントすることにより、10ミリ秒のティックがカウントされます。 変数T0_tick_cntが100に達すると(つまり、1秒が経過すると)、このイベントはハンドラーのifステートメントを使用して決定されます。 その後、変数T0_tick_cntはポートDのピン7を切り替えます。これにより、1000ミリ秒の周期で2番目のLEDが点滅します。
この例をデバッグする場合、メインループと割り込みハンドラーの両方にブレークポイントを設定できます。
5番目の例は、作業のロジックによると、前の例ですが、マクロ関数を使用しています。
/* */ #include <ioavr.h> #include <intrinsics.h> #include <ina90.h> /* */ // #define F_CPU 16000000 // #define DELAY_TIME 500 // // #define LED1_DDR DDRD #define LED1_PORT PORTD #define LED1_PIN DDD7 // // #define LED2_DDR DDRD #define LED2_PORT PORTD #define LED2_PIN DDD6 // #define F_CPU_DIV_1 (0<<CS02)|(0<<CS01)|(1<<CS00) #define F_CPU_DIV_8 (0<<CS02)|(1<<CS01)|(0<<CS00) #define F_CPU_DIV_64 (0<<CS02)|(1<<CS01)|(1<<CS00) #define F_CPU_DIV_256 (1<<CS02)|(0<<CS01)|(0<<CS00) #define F_CPU_DIV_1024 (1<<CS02)|(0<<CS01)|(1<<CS00) // #define TCNT0_VALUE 99 // #define T0_TICK_CNT_LIMIT 100 // #define UINT unsigned int /* */ // #define LED1_INIT() ( LED1_DDR |= (1<<LED1_PIN) ); // #define LED1_LOW() ( LED1_PORT &=~ (1<<LED1_PIN) ); // #define LED1_HIGH() ( LED1_PORT |= (1<<LED1_PIN) ); // #define LED1_TOG() ( LED1_PORT ^= (1<<LED1_PIN) ); // #define LED2_INIT() ( LED2_DDR |= (1<<LED2_PIN) ); // #define LED2_LOW() ( LED2_PORT &=~ (1<<LED2_PIN) ); // #define LED2_HIGH() ( LED2_PORT |= (1<<LED2_PIN) ); // #define LED2_TOG() ( LED2_PORT ^= (1<<LED2_PIN) ); // #define TIMER0_SET_CLK_DIV(x) ( TCCR0 |= x ); // #define TIMER0_SET_CNT(x) ( TCNT0 = x ); // #define TIMER0_OVF_INT_ON() ( TIMSK|=(1<<TOIE0) ); // #define DELAY_US(us) __delay_cycles((F_CPU / 1000000) * (us)); // #define DELAY_MS(ms) __delay_cycles((F_CPU / 1000) * (ms)); /* */ // T0 UINT T0_tick_cnt=0; /* */ // void main( void ) { // // LED1_INIT(); LED2_INIT(); // LED1_LOW(); LED2_LOW(); // ( Normal) TIMER0_SET_CLK_DIV(F_CPU_DIV_1024);// 16 000 000 // 16 000 000 / 1024 = 15 625 // 1 / 15 625 = 0,000064 =64 TIMER0_SET_CNT(TCNT0_VALUE); // 156 * 0,000064 c = 0,009984 c (10 ) // 255-156 = 99 TIMER0_OVF_INT_ON(); // // _SEI(); // for(;;) { // _NOP(); // LED1_TOG(); // DELAY_MS(DELAY_TIME); }//end for } /* T0 */ #pragma vector=TIMER0_OVF_vect __interrupt void ISR_TickTimer(void) { // _NOP(); // T0 T0_tick_cnt++; // 1 if (T0_tick_cnt >= T0_TICK_CNT_LIMIT) { // T0 T0_tick_cnt=0; // LED2_TOG(); }//end for // // TIMER0_SET_CNT(TCNT0_VALUE); }//end func
設定がマクロTIMER0_SET_CLK_DIV(X)を用いて行った場合を示し、コントロールのビットは、ゼロTCCROタイマレジスタ、周波数を分割してクロック定義F_CPU_DIV_1、F_CPU_DIV_8、F_CPU_DIV_64、F_CPU_DIV_256、F_CPU_DIV_1024のセットから選択される方法を決定する引数x。 初期値は、マクロ関数TIMER0_SET_CNT(x)を使用してアカウントレジスタTCNT0に記録されます。引数xは初期値そのものです(この場合、TCNT0_VALUE = 99)。 TIMSK割り込みマスクレジスタのTOIE0ビットの設定は、マクロ関数TIMER0_OVF_INT_ON()を使用して実行されます。
IARプロジェクトの形式のすべての例は、 ここからダウンロードできます 。
おわりに
この投稿に関心がある場合は、次のパートでは、内蔵ADCである7セグメントでの作業例を検討します。 その後、デジタル温度計のソフトウェアプロジェクトで検討したすべての例を収集します。
加算
IARで記述されたプログラムの16進ファイルを取得する必要がある場合、これを行うことはまったく難しくありません。 以下のスクリーンショットのように、設定を行うには、[リンカー]-> [出力]タブおよび[リンカー]-> [追加出力]タブのプロジェクト設定で十分です。 その後、サブフォルダー[プロジェクト名] \ Debug \ ExeでProject-> Rebuild Allをクリックしてプロジェクトをリビルドすると、hexファイルが見つかります。 AVR910プログラマー、STK500クローン、または他の利用可能なプログラマーで縫うことができます。