今日は、GDRを生産するためのコンピューターテクノロジーに関する別の投稿でOld Ironハブを補充します。
覚えているように、HabréはすでにRobotron CM 1910コンピューターのレビュー投稿を行っており、コメントとプラスの数から判断すると、ドイツ民主共和国の同志によって作られたブルジョアコンピューターのクローンは博物館の展示物の無関心なファンを残しませんでした。
今回は、以前のRobotron CM 1910と同様に、ロシアの研究機関の1つで長い間(2001年まで)使用されていたPC XT互換のRobotron EC 1834コンピューターについて説明します。

Robotron EC 1834は、1986年以来、ドレスデンのVEB Robotron-Elektronik工場とKarl-Marx-Stadt(現在のドイツ、ケムニッツ)のFachgebietGeräteE2、およびVEBRobotron-Büromaschinenerで製造された最初のEC-PCコンピューターです。ゾンマーダ市の「エルンストタールマン」。 1988年のコンピューターのコストは59589ドイツマークでしたが、ハードドライブなしのモデル(このモデルには5つのディスク用に4つのドライブが装備されていました)をわずか39044ドイツマークで購入することで、大幅に節約できました。
ソビエト連邦およびCMEA諸国では、 Robotron EC 1834コンピューターは、以下を含む産業および研究プログラムの多くの分野で広く使用されていました。
- CAD / HAPの一部として、たとえば、機械工学、電子工学、建設など。
- 経済問題の解決、経理、請求書発行、在庫管理、給与計算、グラフィック表示など
- モデリング、測定機器のタスク、知識処理の小さなタスクなど、科学的および技術的な問題を解決するため。
- 意思決定などをサポートするための検索および情報システム
Robotron EC 1834の技術仕様。
- プロセッサー: K1810VM86または同等のもの。 クロック周波数は4.9152 MHzです。
- コプロセッサー: K1810VM87または同等のもの、Intel 8087と互換性があります。
- RAM:マザーボード上の256KBの内部RAM。 K3575.10拡張ボードを使用して640Kbに、またはこれらのボードのうち2つを使用して1MBに拡張されます(未確認の情報による)。
- ハードディスク: MFM、ボリューム-20.9 MB(モデルK5504.20)、時には43.5 MB(モデルK5504.50)。 2台目のHDDコントローラーと取り付けバスケットの空きスペースがある場合、2台のハードドライブを取り付けることができます。
- ドライブ: 5 "DD 360Kb / 720Kb、2個。4台のドライブを取り付けることができます(HDDの座席に)。
- ビデオカード:モノクロMON K7031またはカラーCOL K7033.10(最大解像度-640x480、CGAおよびEGA互換)。 2つのビデオカード(MONおよびCOL)の同時操作が可能です。
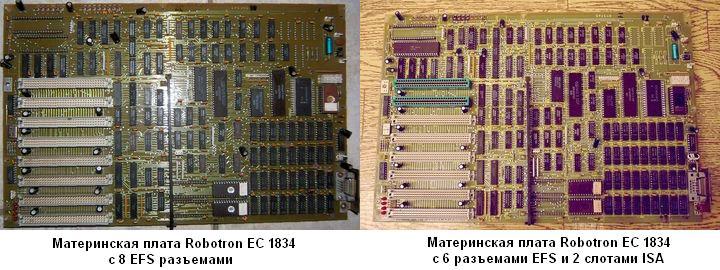
- 拡張カード用のスロット: 8個、EFS(3列に96の接点があるコネクタ)。 変更EC 1834.01(EC 1834.M)には、6個のEFSと2個のISAがありました。 未確認の報告によると、輸出モデルにはISAスロットが完全に装備されていました。
- ポートコントローラ:パラレルポート-K6075拡張カード、シリアルポート(V.24 / IFSS)-K8075.10拡張カード、Rolanetアダプタ-K8625.10拡張カードなど。
- モニター:コンピューターには、次のモニターのいずれかが装備されていました-
- 12 "モノクロ(黒緑)モニターK7229.25、テキストモードで80x25文字、グラフィックモードで最大解像度640x480 dpi、水平周波数32 kHz、垂直周波数50 Hz。
- 14 "モニターK7229.25に似た特性を持つカラーモニターK7233、4色のパレット。
- サウンド:スピーカートゥイーター(スピーカー)。
- オペレーティングシステム: DCP-DOS (クローンMS-DOS)、 MUTOS1834 (クローンUnix)。
- 消費電力: 180ワット。
- 重量: 28.5 kg。
外観
コンピューターRobotron EC 1834の外観は、通常のIBM PC XTと変わりません。
システムユニットのケースは厚い金属でできており、前面と背面のパッチパネルはプラスチックでできています。

前面パネルには、電源ボタン、5インチドライブ用の2つのコンパートメント、赤いLEDのペア、およびキーボードコネクタがあります。リセットボタンはありません。

コンピュータの背面には、電源コネクタ、ファン、拡張カード用のコンパートメントがあります。
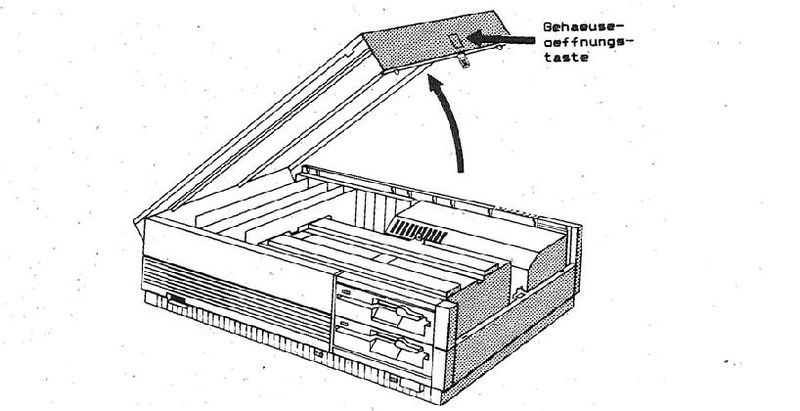
システムユニットのカバーは、特別なラッチで閉じた状態に固定されています。 ケースを開くには、右壁にあるボタンを押す必要があります。

ご覧のとおり、このRobotron EC 1834コンピューターインスタンスは、ゾンマーダ市でリリースされました。

K7673.03キーボードには、ほぼ標準のボタンレイアウトと、ロシア語を話すユーザーに適したレイアウトがあります。
Robotron EC 1834コンピューターで入手したK7229.25モニターは、モノクロ、黒、緑で、対角線は12インチです。 モニターケースは金属製です。 上下に通気孔があります。

ブラウン管スクリーンのすぐ下のモニターケースの前面には、電源インジケータライトと輝度調整ノブがあります。

ケースの背面には、電源スイッチ、電源ケーブルとヒューズのペアを接続するためのコネクタがあります。

モニターコネクタはDB9です。
内部デバイス。
モニター
Robotron CM 1910についての投稿で、私はあまりにも面倒で、モニターの内側の写真を撮りませんでした。 次に、この誤解を修正します。
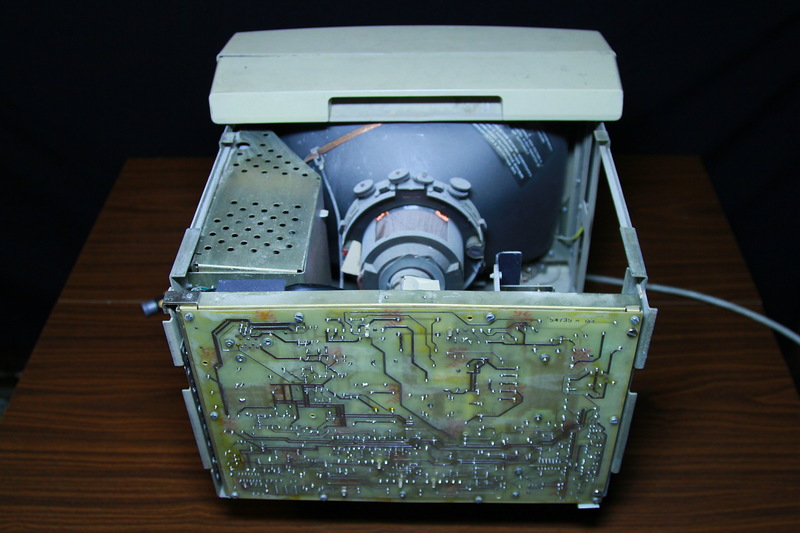
背面パネルを取り外した状態でモニターします。
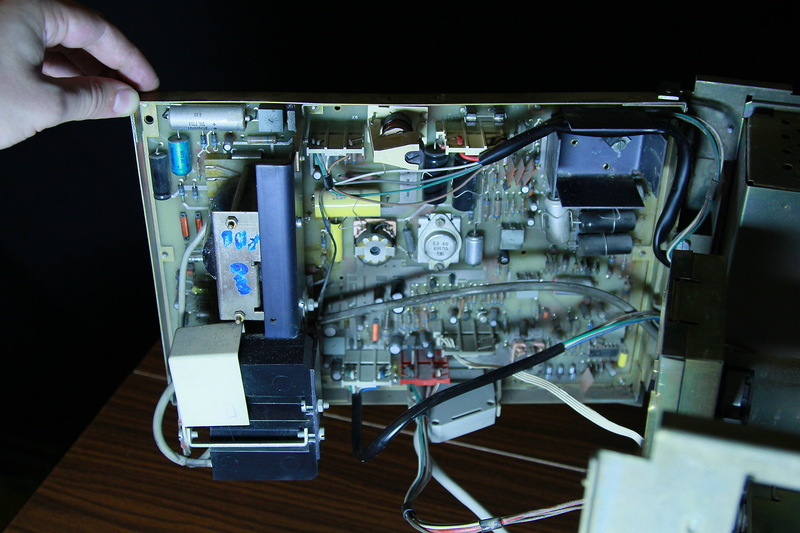
電子機器付きのシャーシ。
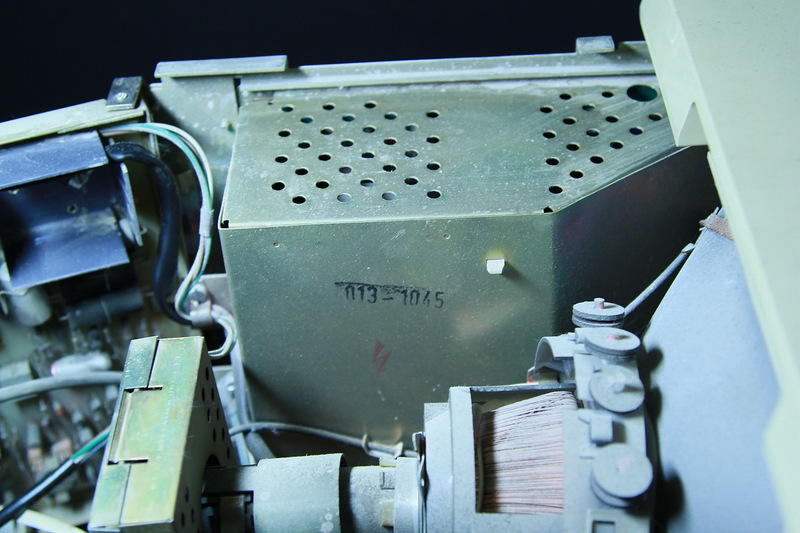
電源の監視
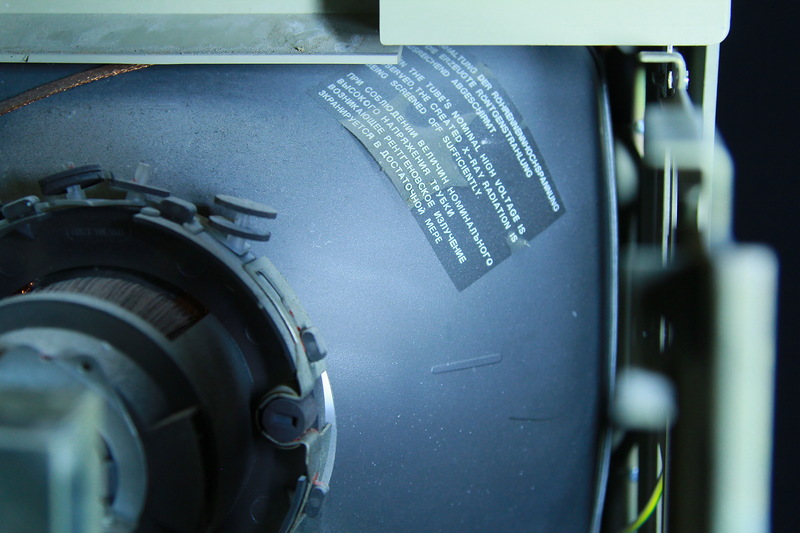
3つの言語でなだめるような碑文とキネスコープ。
システム装置の内容。
コンピューターのコンポーネントに簡単にアクセスできるRobotron EC 1834は 、ヒンジでコンピューターケースに固定されたフードフードの一種です。 ネジなしで固定され、スナップボタンは1つだけです。ヒンジを使用すると、1回の簡単な移動でカバーを完全に取り外すことができます(この操作は、ケースの背面に向かって、自然に手でカバーを開いたままにする必要があります)。

フロントとリアのプラスチック製トリムも、プラスチックの溝とラッチを使用して、ネジなしで完全に固定されます。

上記の体の部分を取り除きます。
ハードドライブとドライブを取り付けるためのバスケットは、2本のネジと金属製の舌部によって自然な位置に固定されています。

前述の2本のネジを外し、タブを引き上げると、バスケットをその中身とともにコンピューターケースから取り外すことができます。 ドライブとHDDからケーブルと電源ケーブルを外すことを忘れないでください。そうしないと何も機能しません。

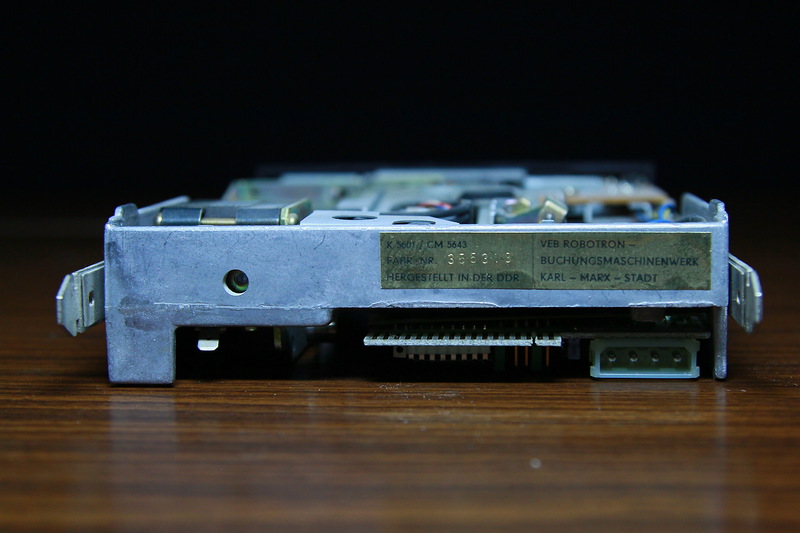
バスケットには、720Kbのデュアル密度フロッピーディスク用の2つの5インチK5601 / CM5643ドライブと、容量20.9MBのK9504.20ハードドライブが含まれています。

バスケットのすぐ後ろには、出力電圧が+ 5、+ 12、-12、-5 Vの180 W電源があります。これは、他のすべての電源と同様に、ネジでケースに固定されています。

電源を取り外します。

これで、PSUの金属ケースを開けて、その腸から虫やクモを追い出すことができます。
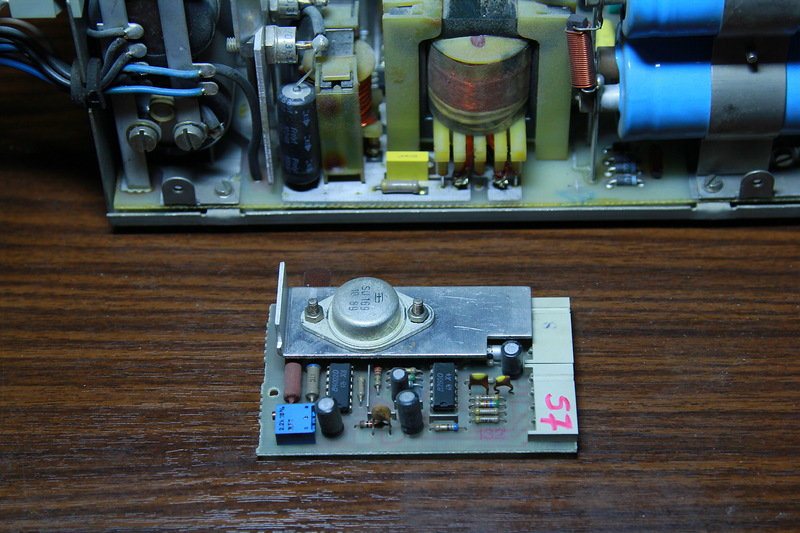
電源の内部には、故障した場合に非常に簡単に変更できる小さなモジュールがあります。
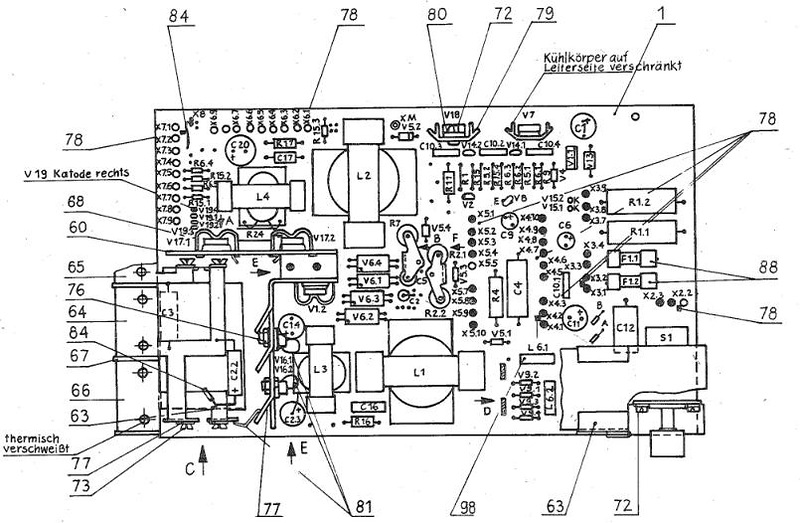
この画像では、PSUメインボード上の電子部品の位置を確認できます。
電源を閉じ、さらに見てください。
マザーボード
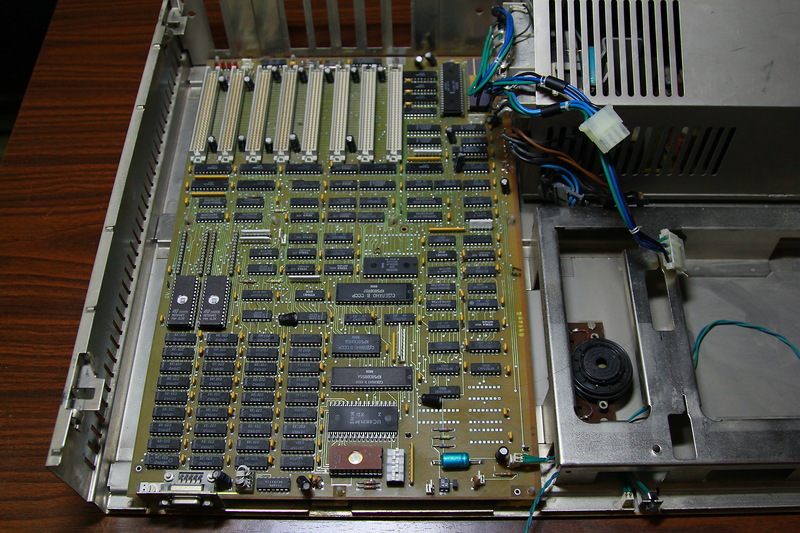
実際、 Robotron CM 1910コンピューターとは異なり、 Robotron EC 1834モデルでは実際のマザーボードを見ることができます!
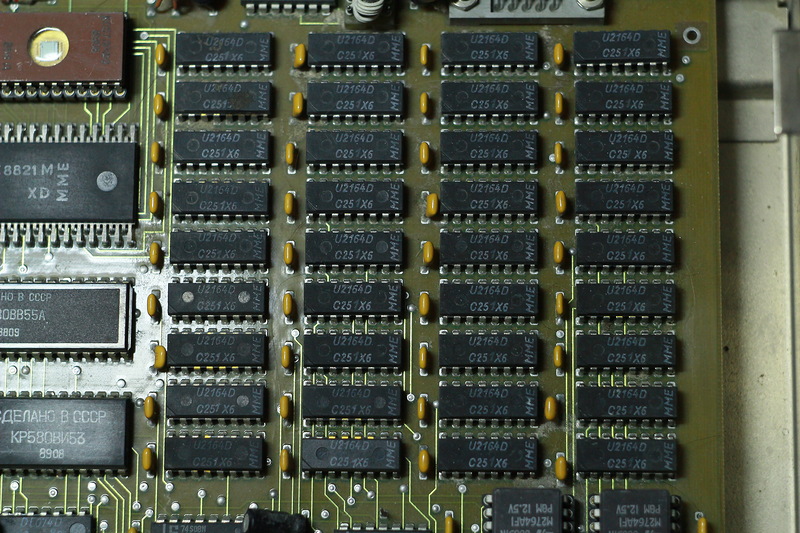
マザーボードのかなり大きな部分は、U2164D RAMチップ(ソビエトKR565RU5Dのアナログ)で占められており、その容量は36個で64 Kビットです。 マザーボードにはんだ付けされるRAMの合計量は256Kbです。
コンピューター構成(RAM容量、コプロセッサーの可用性、ドライブ数など)は、DIPスイッチを使用して設定されます。
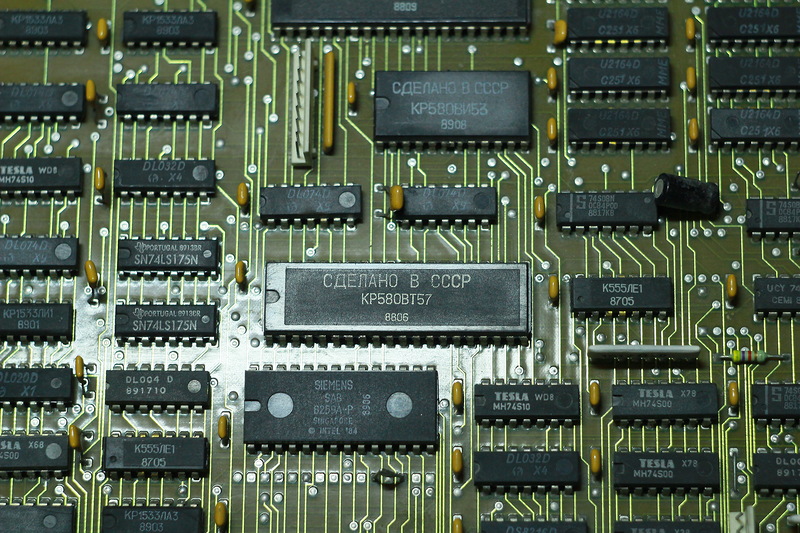
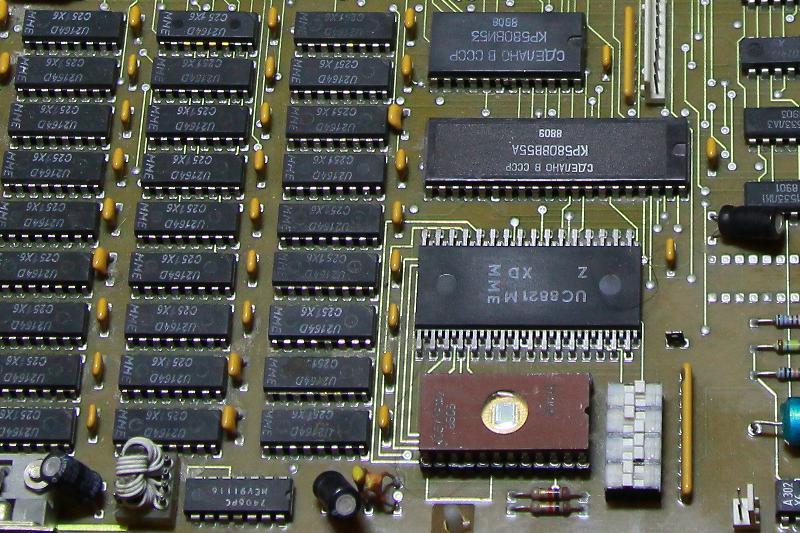
CMEA諸国にはi8237と同様のDMAコントローラーがないため、EU1834では58057コントローラー(このチップに「Made in the USSR」と自称)が3つの追加4ビットレジスタを使用して使用されました。 このような回路ソリューションは、あるメモリ領域から別のメモリ領域に情報を転送する機能の喪失につながりました。
控えめに言うと、国産の超小型回路はほとんど使用されていません。 K1810VM86プロセッサの代わりに、Siemens関係者が製造した同様のSAB8086-P超小型回路をインストールしようとしたため、本質的に「本物の」ソビエトプロセッサを見つけるのはかなり困難です。 しかし、私は幸運でした。RobotronEC 1834コンピューターの既存のコピーの1つに、このようなハンサムな男がここにインストールされました。
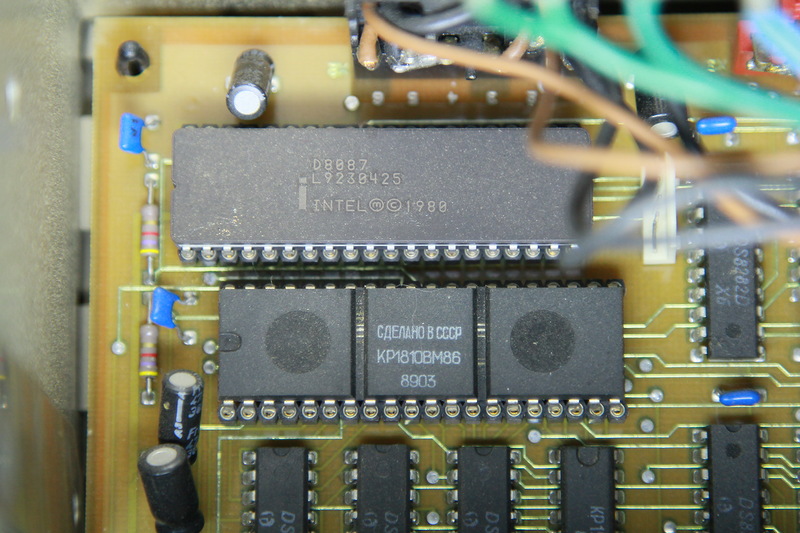
ソ連製のK1810VM86プロセッサ。
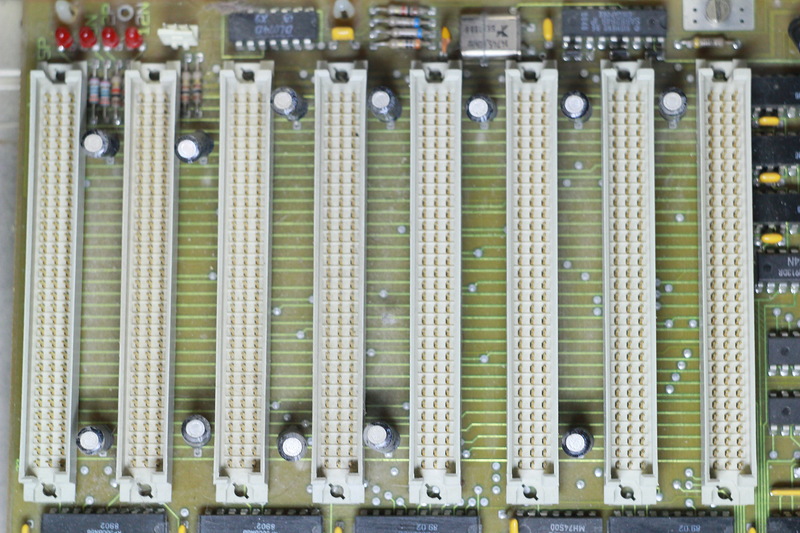
拡張カードは、3列に96個の接点があるEFSソケットに取り付けられます。 このマザーボードには拡張カード用の8個のEFSスロットがありますが、標準のISAスロットが使用されているマザーボード(EC 1834.01およびEC 1834.Mモデルなど)には他の変更があり、ビデオカードやネットワークカードなどの「西側」コンポーネントを使用できますアダプター。
Robotron EC 1834コンピューターの16ビット入出力バスはISA規格とほぼ完全に互換性があるため、ISAスロットをマザーボードにはんだ付けせずに通常の(「ブルジョア」)拡張カードを接続できました。 このような倒錯の場合、対応するアダプタをはんだ付けするだけです。
Robotron EC 1834コンピューターのマザーボードをよりよく検討する場合は、同様のマザーボードの写真を高解像度でダウンロードすることをお勧めします 。
Robotron EC 1834コンピューターのマザーボードでは、最大8枚の拡張カードを同時に使用できます。 これらのカードの短いリストを表1に示します。
| お名前
| モデル
| 短い名前
| 行き先
| ご注意
|
|---|---|---|---|---|
| 013-1201
| K3575.10
| Ops
| RAM
| 384k RAM
|
| 018-1216
| K5132.10
| HDC
| ハードディスクコントローラー
| 2台のハードドライブのサポート
|
| 013-1203
| K7031
| 月
| モノクロビデオアダプター
| テキストモードのみ
|
| 013-1202
| - | ASC
| シリアルポートアダプター
| V.24インターフェースで2つのポートをサポート
|
| 013-1207
| K8031.10
| キフ
| KIFインターフェースコントローラー
| ESER互換コンピューターに接続するための拡張カード
|
| 013-1211
| K8075.10
| 質問する
| シリアルポートアダプター
| 2つのV.24またはIFSSポートのサポート
|
| 013-1213
| K8075.20
| ASL K8075
| 光ファイバシリアルアダプタ
| 2つの光ファイバーポート用インターフェイスボード(非同期、デュプレックス)、50〜19200ボー、1000 m。
|
| 062-9315
| K5131.10
| HDC
| 別のハードドライブコントローラー
| 2台のハードドライブのサポート
|
| 062-9325
| K7033.10
| コル
| カラービデオアダプター
| グラフィックモードグラフィックカード
|
| 062-9326
| K8625.10
| ロル
| Rolanetアダプター
| ローカルネットワークROLANET (Robotron Local Area Network)のコントローラー
|
| 093-3200
| K6075
| PRI
| LPTポートアダプター
| LPTプリンターを接続するためのパラレルポート
|
| 093-3200
| K5175.10
| FDC
| ディスクドライブコントローラー(HDD)
| 最大4台のK5601ドライブをサポート
|
| ?
| - | LAN
| LANアダプター
| LANコントローラーLOTUNET
|
| ?
| K2075.10
| Bk600
| 拡張カード(「アクセラレータ」)
| 追加のプロセッサU80601 (偶然にもIntel 80286互換!!!!)と1 MBのRAMを備えた拡張カード
|
Robotron EC 1834にある拡張カードがどのように見えるか見てみましょう。
カラービデオアダプターCOL K7033.10
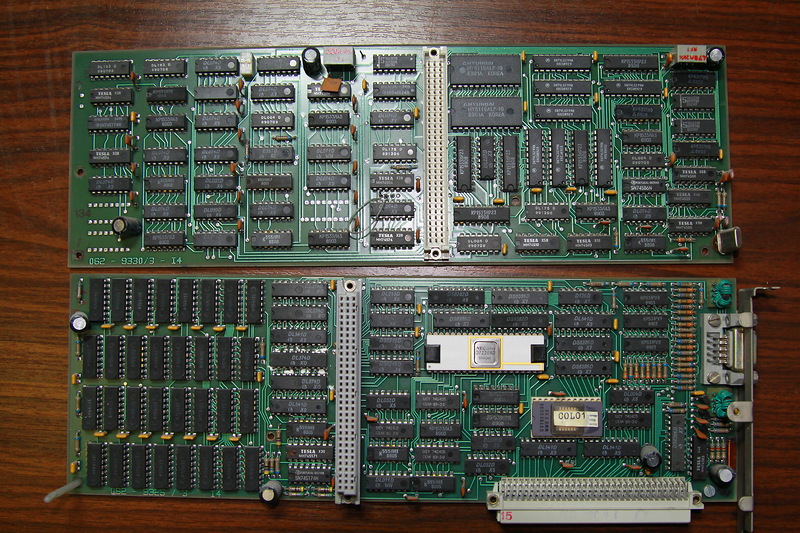
K7033.10ビデオカードは、3列のコンタクトを備えたコネクタによって相互接続された2枚のプリント基板で構成されています。 その寸法により、取り付けられたビデオカードは2つの拡張スロットを占有するため、空きスロットは6つだけです。
このビデオカードの中心はNEC D7220ADグラフィックプロセッサであり、ビデオメモリは4164/15のマークが付いた32個のチップで構成されています。
モニターをK7033.10ビデオカードに接続するには、DB9コネクタを使用します。 ただし、ビデオカードのビデオモード機能により、対応するアダプターをはんだ付けすることにより、 Robotron EC 1834コンピューターを最新のVGAモニターに接続することができます。そのピン配列は以下のとおりです。
| 15ピンVGA
| 9ピンビデオ
|
| 3 | 5 |
| 2 | 4 |
| 1 | 3 |
| 10 | 2 |
| 11 | 1 |
| 13 | 9 |
| 14 | 8 |

結果は似たようなものになるはずです。
このスキームを使用して接続された一部のモニターが機能しないか、正しく機能しない可能性があること(アーティファクトを含む)をすぐに警告します。 たとえば、Samsung SyncMaster T190GNモニターは画面上に画像を表示することを完全に拒否しましたが、LG Flatron W2343Tモニターはそれほど繊細ではありませんでした。
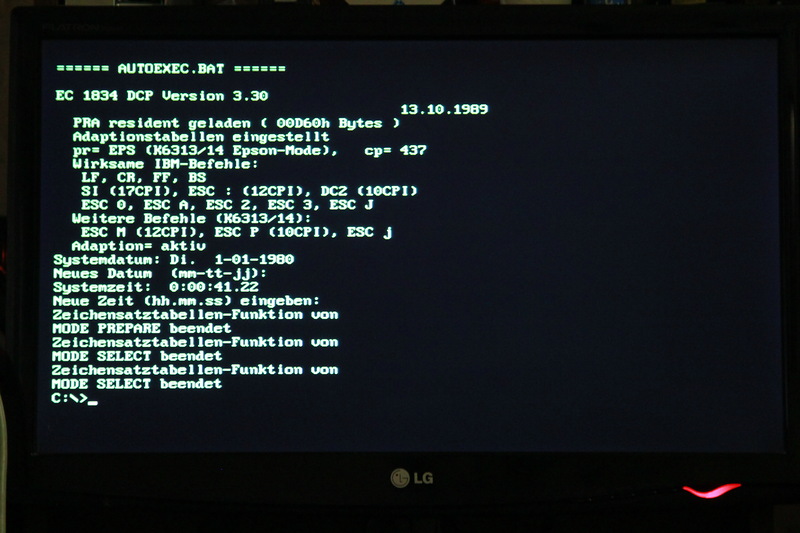
LG Flatron W2343T LCDモニター上のRobotron EC 1834コンピューターからの画像。
パラレルポートPRI K6075
パラレルポートアダプタは興味深いものではありません。
OPS RAM拡張カードK3575.10
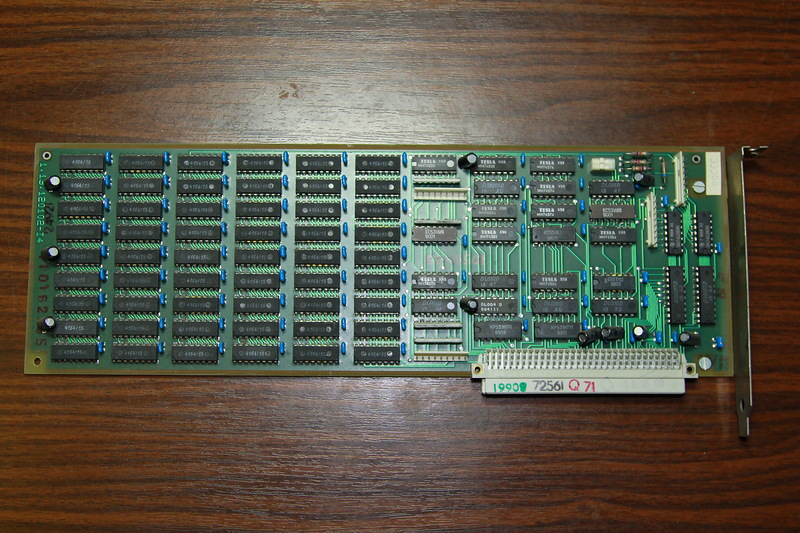
拡張カードには54個の4164/15チップがあります。 合計:384KBのRAM。
HDC K5132.10ハードディスクコントローラー
ハードディスクコントローラの基礎は、チップWD1010A-PLです。
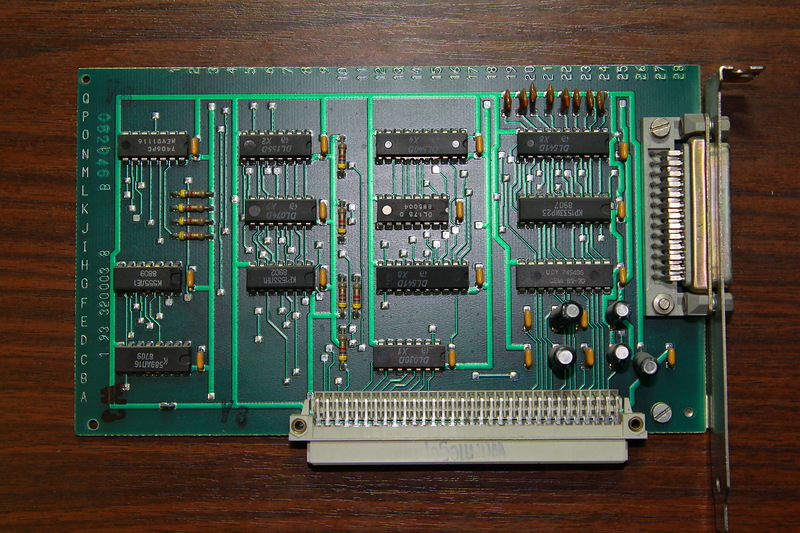
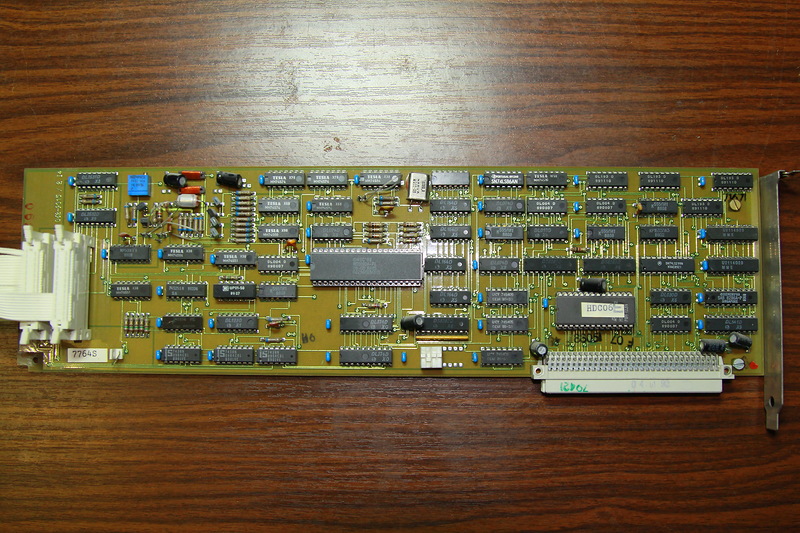
ASK K8075.10シリアルポートアダプター

このカードには2つの15ピンコネクタがあり、それぞれV.24またはIFSSインターフェイスとして機能できます。
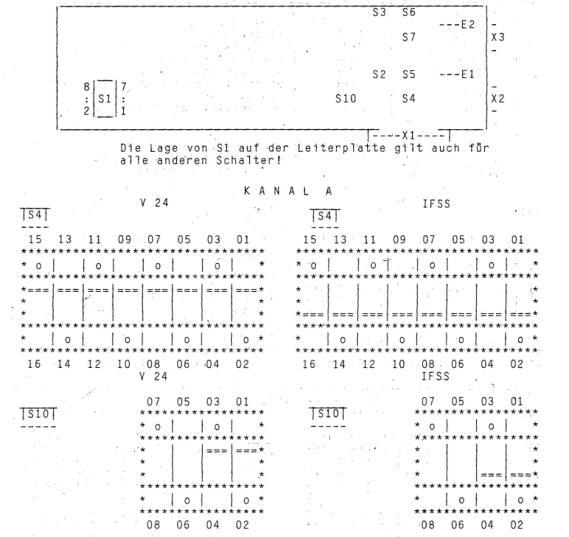
ASK K8075.10アダプターは、DIPスイッチを使用して構成されます。
HDDコントローラーFDC K5175.10
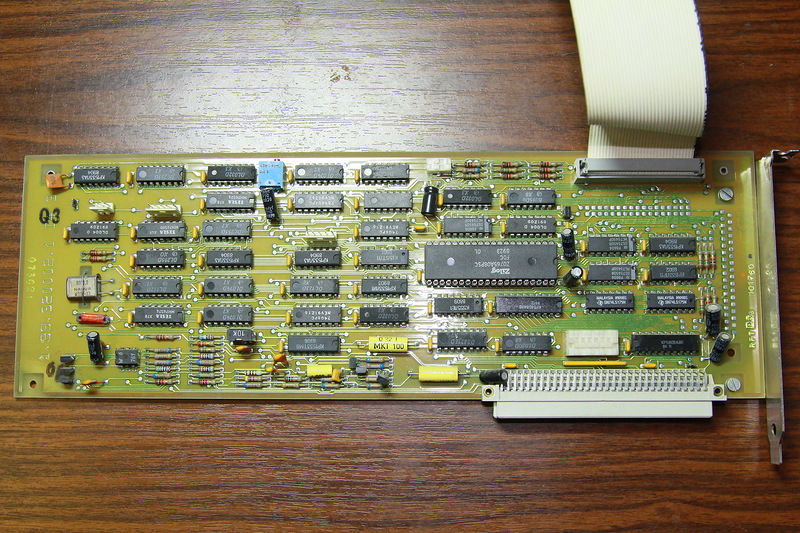
HMDコントローラーの動作は、専用のZilog Z0765A08PSCマイクロ回路によって提供されます。
ソフトウェア
オペレーティングシステム
Robotron EC 1834コンピューターは、DCP-DOS 3.30またはMUTOS1834オペレーティングシステムを実行しています。
DCP-DOS 3.30は、Robotron EC 1834コンピューターのソフトウェアとハードウェアの機能を考慮したMS-DOS OSのクローンです。

ほとんどの場合、DCP-DOS OSの一部であるコマンドとユーティリティは、ハードウェアを構成するための特定のドライバとユーティリティを除き、MS-DOSと同様の機能を実行します。
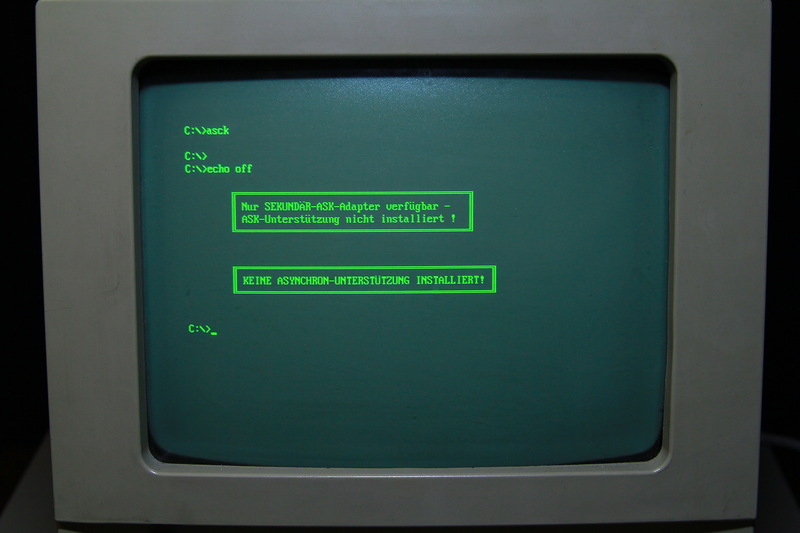
たとえば、DCP-DOS 3.30には、標準のIBM PC XT I / Oアドレスのシリアルポートコントローラーと対話するプログラムとASK / ASC拡張カードの互換性を確保するために設計されたASCKコマンドがあります。

また、COMDRVドライバーは、INT 14H割り込みを介したアプリケーションプログラムとシリアル入出力ポートとの対話に必要です。
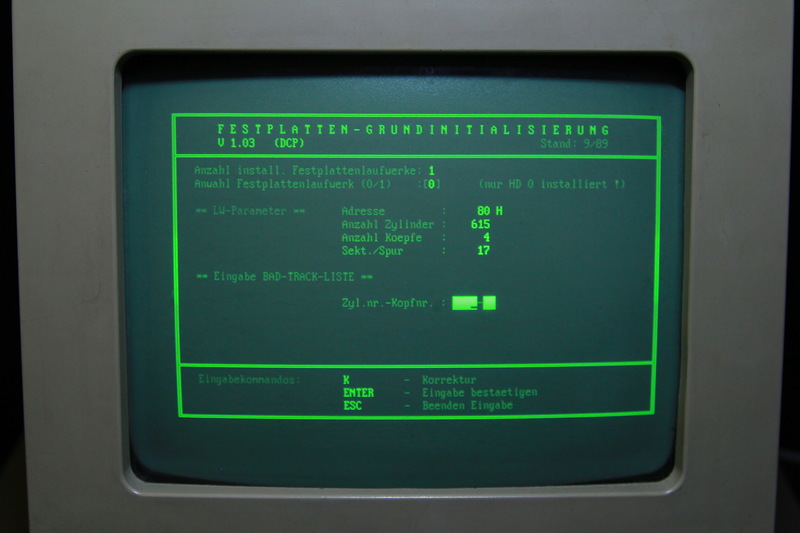
特に、DCP-DOS 3.30には、MFM HDINITハードドライブの低レベルフォーマット用ユーティリティが含まれています。 彼女は、HDDで問題が発生した場合にのみ使用する必要があります。 IBM PC XT用に作成された低レベルのフォーマットプログラムは、Robotron EC 1834コンピューターでは正常に動作しません。ハードドライブをまったく検出しないか、フォーマット時に不明なセクターについて不平を言います。
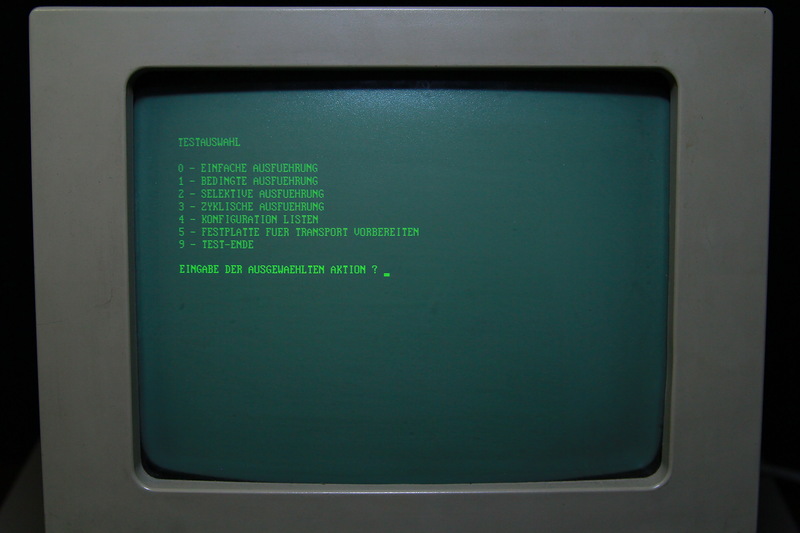
ハードウェアの特異性を考えると、DCP-DOS 3.30 OSの診断プログラムの欠如は動揺しています。 ただし、診断プログラム自体はもちろん存在し、 ECDIAGと呼ばれます。
MUTOS1834は、Robotron EC 1834に適合したUnix OSです。
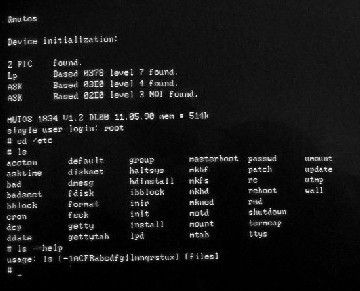
ソース: robotrontechnik.de
残念ながら、私はそれを扱うことができなかったし、インターネット上にこのオペレーティングシステムのディスクイメージはありません。
上記のオペレーティングシステムに加えて、MS-DOSのどのバージョンでもRobotron EC 1834コンピューターで使用できますが、OSにMSがないため、特定のハードウェア(シリアルポートコントローラー、ネットワークアダプターなど)は機能しません-DOSカスタムドライバーおよびユーティリティ。
アプリケーションソフトウェア。
日常的なニーズと産業用の両方のために設計されたかなり多数のソフトウェアがあったことは注目に値します。 IBM PC XT用に作成されたほとんどのプログラムはRobotron EC 1834コンピューターで実行できることを考えると、このコンピューターの範囲は事実上無制限でした。
設計ソフトウェア:
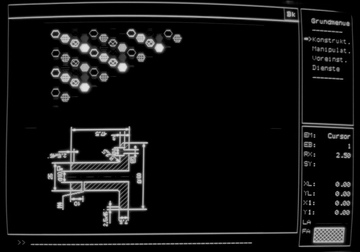
GEDIT 2. ソース: robotrontechnik.de
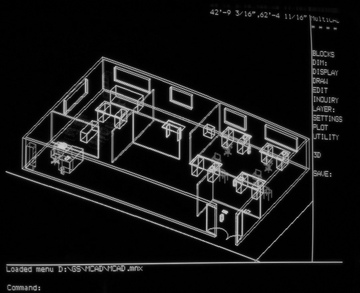
MultiCAD。 ソース: robotrontechnik.de
プログラミング:
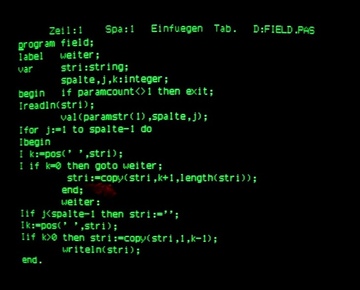
パスカル ソース: robotrontechnik.de
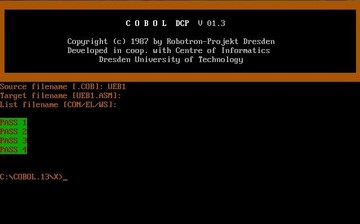
COBOL。 ソース: robotrontechnik.de
テキストエディター:
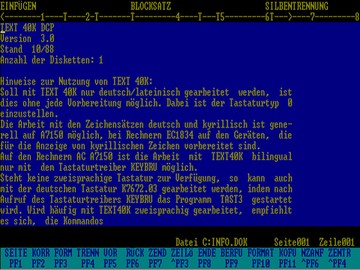
TEXTnet40。 ソース: robotrontechnik.de
コンテキスト。 ソース: robotrontechnik.de
また、ゲームはRobotron EC 1834コンピューターを通過しませんでしたが、それらに注目することにはあまり意味がありません。IBMPC XTで実行され、CGA \ EGAビデオカードで動作するほとんどすべてのゲームもこのマシンで実行できます。
ご清聴ありがとうございました!