
動作原理
現在、市場には2つのウィンドウクリーニングロボットがあり、それぞれに独自の原理があります。 韓国企業Ilshim GlobalのWindoroには2つのモジュールがあります。1つはナビゲーション用、もう1つはクリーニング用です。 モジュールはガラスの両側に取り付けられ、永久磁石を使用して保持されます。 これは、ロボットがバッテリーを使い果たしても、落下せず、窓にとどまり続けることを意味します。
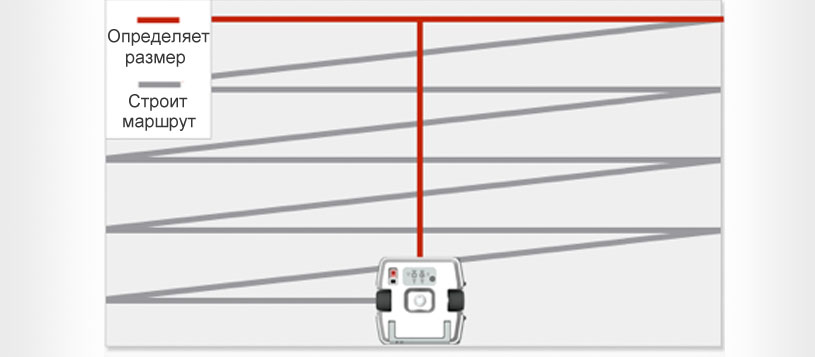
 最初のモジュールは、ガラスの表面でデバイスを操作するための「頭脳」です。 彼は掃除をせず、ガラスのサイズを計算し、ルートを決定するだけです。 Windoroは最初にウィンドウのサイズを決定します。 これを行うために、彼はフレームからフレームへ水平および垂直方向に通過し、バンパーでウィンドウの端に寄りかかっています。 さらに、ロボットはヘビに沿って移動することでクリーニングを実行します。つまり、移動は無秩序ではなく一貫しています。 2番目のモジュールはクリーニング中です。 マイクロファイバーパッドがマジックテープで取り付けられている4つの回転ディスクがあります。 中央には、液体を噴霧するための穴があります。 縁をきれいにするために、縁の周りに布スクレーパーもあります。 クリーニングモジュールには移動用のホイールはありません。ナビゲーションモジュールの背後にある磁場によってのみ移動します。
最初のモジュールは、ガラスの表面でデバイスを操作するための「頭脳」です。 彼は掃除をせず、ガラスのサイズを計算し、ルートを決定するだけです。 Windoroは最初にウィンドウのサイズを決定します。 これを行うために、彼はフレームからフレームへ水平および垂直方向に通過し、バンパーでウィンドウの端に寄りかかっています。 さらに、ロボットはヘビに沿って移動することでクリーニングを実行します。つまり、移動は無秩序ではなく一貫しています。 2番目のモジュールはクリーニング中です。 マイクロファイバーパッドがマジックテープで取り付けられている4つの回転ディスクがあります。 中央には、液体を噴霧するための穴があります。 縁をきれいにするために、縁の周りに布スクレーパーもあります。 クリーニングモジュールには移動用のホイールはありません。ナビゲーションモジュールの背後にある磁場によってのみ移動します。
以下のビデオでは、Windoroの仕組みをより詳しく理解できます。
すでに述べたように、窓を洗うための別のロボットがあります。 彼はロシアでは代表されていませんが、言及されるべきです。 このモデルは、中国の会社EcovacsのWinbotと呼ばれています。 Winbot 5プロトタイプはもともと実証されていましたが、両側にも磁石が取り付けられていましたが、イルシムグローバルが中国に特許侵害があることを明確に指摘したとき、後者はためらうことなく、動作の真空原理を備えたWinbot 7をリリースしました。 確かに、デバイスは2013年にのみ市場に参入しました。 Winbot 7の動作原理はわずかに異なり、真空吸引カップのためにガラスに取り付けられているモジュールは1つだけです。
洗濯用の窓を使い果たして苦しんでいる中国人の少女の製品に関するこのオリジナルのビデオでは、仕事の原理を視覚的に評価できます。
手元にはこのデバイスがないため、実際の作業とクリーニングの品質はサードパーティのローラーで推定できます。
また、Winbotはガラスのサイズを決定し、クリーニングサイクルの終了後に開始点に戻ります。 WInbotだけが実際にガラスを洗うのではなく、拭きます。 実際、それは洗剤ディスペンサーと回転するクリーニング要素さえもないガラス研磨機です。 一方、WINDOROは液体をスプレーし、回転するワイプで表面をきれいにします。
デバイスの主な長所と短所を強調すると、次の比較が得られます。
| ウィンドーロ | ウィンボット |
| 永久磁石により、2つのモジュールが窓にしっかりと固定されます。 | 1つのモジュールは吸引カップで保持されます。 落下する可能性があるため、吸引カップを使用してデバイスの損傷を防ぐ必要があります。 |
| 洗剤ディスペンサーとマイクロファイバー回転パッドがあります。 | 洗剤はナプキンで手動でのみ濡らすことができます;効果的に汚れをきれいにする回転部品はありません。 |
| リチウムポリマー電池を搭載。 最大1.5時間の連続稼働時間。 | 主電源でのみ動作します。 ネットワークから電力が供給されない場合、ロボットは内蔵のリチウムイオン電池でしばらく持続します。 クリーニング領域のサイズは、ワイヤの長さによって制限されます。 |
| メガネ間の距離が5〜15 mmで、別の修正が16〜28 mmの窓でのみ機能します。 | メガネ間の距離を問わず動作します。 |
| 片側のみを洗浄します。 非常に汚れたガラスをクリーニングできますが、最初のクリーニングサイクルは品質が悪い場合があります。 さらに1〜2回実行することをお勧めします。 | また、1つの表面のみを洗浄します。 トラックが滑るので、汚染されたガラスで作業を開始できません。 |
| ガラスの表面全体を完全に覆いますが、回転パッドではなく、スクレーパーでのみ端をきれいにします。 | エッジの周りにより多くの未洗浄領域を残し、より多くの時間を洗浄に費やします。 |
| ウィンドウを開く必要があります。そうしないと、ロボットを両側に同時に配置できません。 | ウィンドウを開く必要はありません。 |
最後のポイントは予約する価値があります。 Windoroの場合、補助マウントを使用できます。 モジュールの1つが固執し、ガラスの裏側に別のモジュールを引っ掛けて、ガラスの外側部分の固定を解除します。 つまり、ウィンドウの背面にアクセスする必要がありますが、パートナーからの支援は必要ありません。 アクセサリーは別売りです。
したがって、床を掃除するロボットの場合と同じ話ができます。iRobotScoobaとMintです。 最初は本当に洗ってきれいにし、汚れを拭き取り、2番目は湿った布で拭きます。 そのため、Windoroは表面の汚れを機械的に除去しますが、Winbotはガラス表面を単に拭きます。 シンプルなワイプは、家の掃除、鏡の洗浄に適しています。
ウィンドウタイプ
Windoroには2つのタイプがあります。パスポートに応じたメガネ間の距離が5〜15 mmと16〜28 mmの窓の清掃用です。 これまでのところ、ロシアの人気が高まっていることを考慮して、2番目のタイプのみがロシアに届けられています。 シルバー、レッド、イエローの3色が用意されています。 実際、ロボットはガラス間の間隔が最大35 mmの窓を掃除できますが、同時に、必要な吸引力がなければ、掃除サイクルの開始時に上からわずかに移動するため、掃除されていないスペースの上に数cm離れます。 しかし、以下のテストビデオでそれについて詳しく説明します。
現在、市場にはプラスチック製の窓のさまざまなプロファイルがあります。 メガネ間の距離はしばしば異なります。 ガラスフレームの幅が56 mmであっても、メガネ間の距離は30 mm未満、またはすべて35 mmになります。 多くの場合、フレーム幅が70 mmの窓では、ガラス間の距離(ガラスの厚さ自体を含む)は35 mmです。
また、半円形のフレームは掃除には適していません。 エッジに沿ったロボットの直線的な移動経路を考慮して、未クリアのセクションがあります。
他のすべての場合、ロボットはガラス領域の100%をカバーします。

完全に汚れた窓やきれいな車輪ではなくWindoroを実行することをお勧めします。車輪が滑る(特に30 mmを超える距離)ため、ロボットはかなりの努力でクロールするか、サイトを克服しようとするからです。 ウィンドウがアクセスできない場所にある場合は、汚れた場所から開始できます。 窓を完全に掃除するには、ロボットだけで2〜3回の掃除サイクルが必要です。 清掃後、次の清掃サイクルの前、または窓の反対側を清掃する前に、ガラスを乾かして乾かす必要があります。 繰り返しますが、これはすべて、車輪が濡れた路面で滑ることがあるためです。 上記の写真では、ロボットは眼鏡とメガネの間の距離が36 mmの古いソビエトフレームを掃除していました。
多くの制限があるように見えますが、実際には、ガラスのすべての要件が満たされていれば、複雑なことは何もありません。 リチウムポリマーバッテリーの1回の充電で、Windoroは最大15平方メートルまで掃除できます。
外観と機器ウィンドーロ

ロボットは小さなパッケージで提供されます。 キットには、2つのモジュール(ナビゲーションとクリーニング)、2つの出力を備えた電源(両方のモジュールを同時に充電するため)、独自のウィンドウクリーニング液、IRリモートコントロール、12個のマイクロファイバークロス、6個のサイドスクレーパーがあります。 韓国の品質とプラスチックは満足のいくものではありません。 最初は、モジュールは互いに磁化しないようにボックスに配置されています。 動作中、ウィンドーロを内側で互いに押し付けないでください。 それでもこれが発生した場合は、レギュレーターの助けを借りて磁場を弱め(磁石間の距離を大きくすることにより)、横に自分の方にねじってモジュールを切断する必要があります。 脆弱な女の子の場合、この手順は不可能な場合があります。

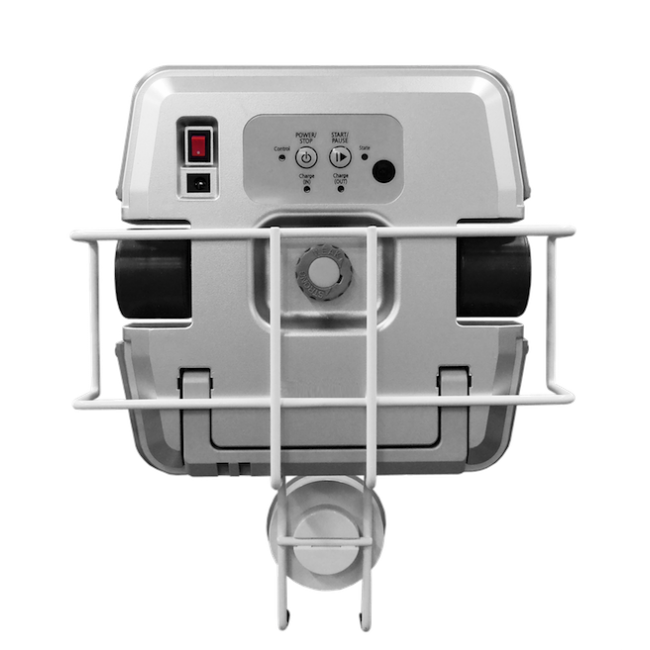
ナビゲーションモジュールは、コントロールボタンと駆動輪の存在によって区別されます。 また、ナビゲーションモジュールには、磁石の吸引力を調整するメカニズムがあります。 基本的なことです。ハンドルを機械的に回転させると、磁石間の距離を変更できます。 ロボットが眼鏡の間のそのような厚さに沿って移動できるかどうかを示すインジケーターがすぐに表示されることは注目に値します。 インジケータが赤色で点灯している場合、ロボットは、磁石の引力が十分でない可能性があることを理解しており、動きません。 ハンドルで調整した後、インジケータが緑色に点灯したら、ロボットは掃除の準備ができています。
 容器を洗浄剤で満たすためのバルブが洗浄モジュールにあります。 容量は40 mlです。 これは、1時間半のクリーニングサイクルまたは15平方メートルに十分です。 もちろん、メーカーはオリジナル製品を使用することをお勧めします。これは、低消費であるため、300〜350平方メートルの洗浄に十分です。 しかし、液体を使用せずに水だけでデバイスを使用することもできます。 Windoroを通常のウィンドウクリーナーで繰り返し起動しましたが、問題はありませんでした。 着色された液体を使用して、半透明のプラスチックを通してタンク内のレベルを観察することをお勧めします。
容器を洗浄剤で満たすためのバルブが洗浄モジュールにあります。 容量は40 mlです。 これは、1時間半のクリーニングサイクルまたは15平方メートルに十分です。 もちろん、メーカーはオリジナル製品を使用することをお勧めします。これは、低消費であるため、300〜350平方メートルの洗浄に十分です。 しかし、液体を使用せずに水だけでデバイスを使用することもできます。 Windoroを通常のウィンドウクリーナーで繰り返し起動しましたが、問題はありませんでした。 着色された液体を使用して、半透明のプラスチックを通してタンク内のレベルを観察することをお勧めします。
コントロールパネルを使用して、Windoroの移動方向の設定、クリーニングサイクルの開始/停止、移動速度の変更、クリーニングの品質、噴霧液の量の設定を行うことができます。 ナビゲーションモジュールのみがコンソールに応答します;クリーニングモジュールにはIRレシーバーがありません
3色から選択できます。 店頭では、赤または黄色のウィンドーロが確実に傍観者を集めます。
ウィンドーロを分解する
Habrの読者は上級者です。 彼らは簡単な説明に興味がないので、特にHabrでは、両方のWindoroモジュールを分解して、すべてのマイクロコントローラー、電気駆動装置、センサーを自分の目で見ました。
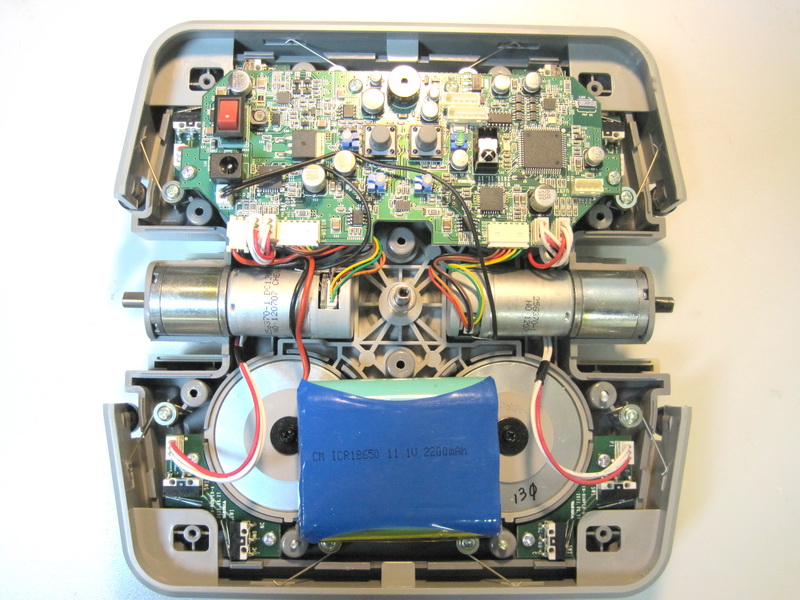
手術台に最初に当たったのはナビゲーションモジュールでした。 モジュールの下部にあるボルトを外し、メインチップにある脳を確認します。 ボタン、電源、およびIRレシーバーがボタンの上にあります(ボタンの右側)。 メカニカルバンパーセンサーは、ハウジングの角に取り付けられています。 2つの主要な電気ドライブ-中央に。 2200 MAhのバッテリーは磁石の上にあり、しっかりと固定されているため、手間をかけずに動かせません。 磁気ディスクは、ねじを外したボルトを含むすべてのものを引き付けます。
おそらくケースからメインボードを除いて、外すことは何もありません。
以下の図は、Windoroの主要な構造要素の指定を示しています。
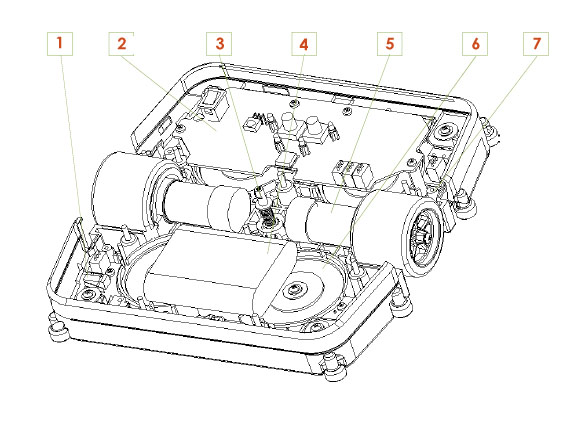
1-バンパーセンサー
2-料金
3-磁石吸引力の調整
4-バッテリー
5-電動ホイールドライブ
6-マグネット
7-バンパースプリング
次に、洗浄モジュールの内部を見てください。 ドライバーで簡単に操作すると、次の図が表示されます。
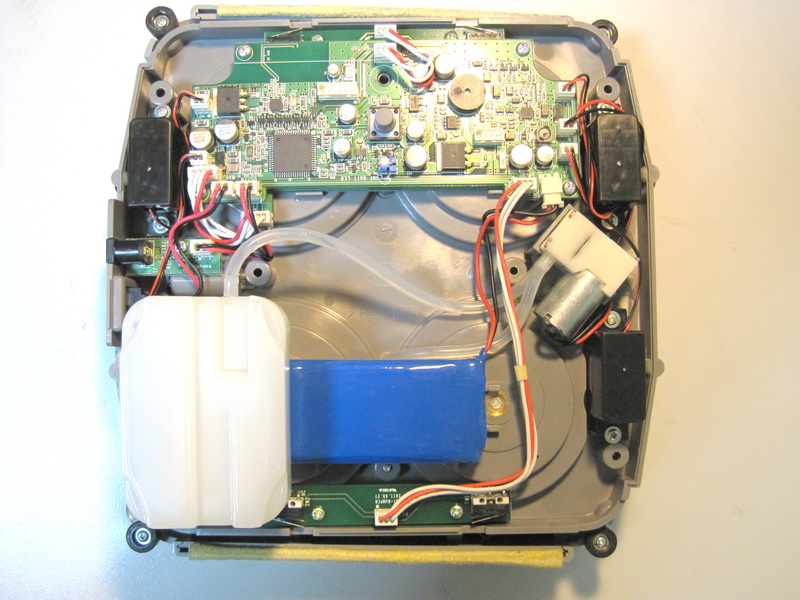
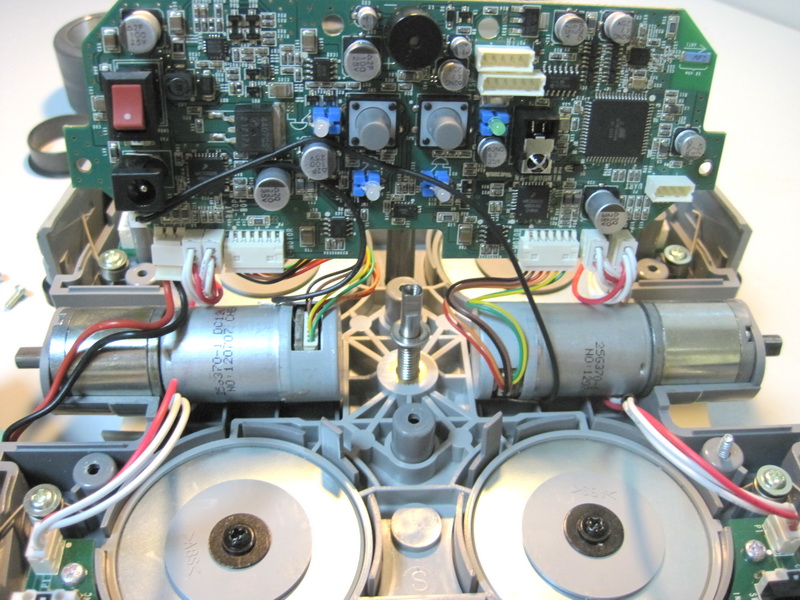
液体リザーバーの隣には、ガラス表面に洗剤をスプレーするためのミニポンプがあります。 バッテリーは、デバイスの本体に接着剤で取り付けられています。 黒い正方形のモジュール-磁石用の電気駆動装置。 以下は、要素の概略図です。
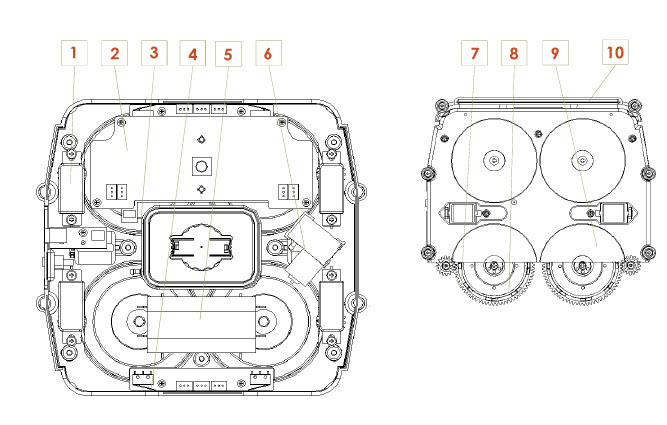
1-電気駆動
2-料金
3-磁石吸引センサー
4-バンパーセンサー
5-バッテリー
6-ミニポンプ
7-ギア
8-マグネット
9-マイクロファイバー
10-サイドスクレーパー

ポンプは、圧力のかかった細いノズルからガラス表面に液体を噴霧します。
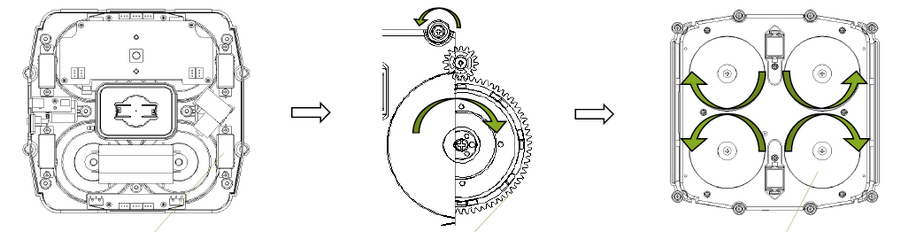
4つの電気駆動装置がギアを介して駆動します。
大まかに言えば、ロボットのデバイスに精通したので、実際のテストに移りましょう。
試験結果
ウィンドウ間隔30 mmのフレームでWindoroをテストすることにしました。 これはパスポートに記載されている2 mm以上です。 明確にするために、書店から塗料を塗り、デバイスを2回起動しました。
テスト結果は、ウィンドウの約95%がロボットがほぼ完全に洗濯することを示しました。 優れた再利用可能なマイクロファイバーパッドがトリックを行います。 ちなみに、それらは2種類の材料で作られており、青いインサートの構造は白よりも著しく硬いです。 したがって、ウィンドーロはよく汚れた汚れをきれいにします。
メガネ間の距離がパスポート上よりも大きいため、ロボットは窓の上部に約3〜4 cm離れました。 すでに述べたように、これはモジュール間の引力が距離の増加とともに弱まり、ロボットが窓にとどまることがより困難になるためです。 さらに、ロボットは経路を修正し、水平方向の動きでわずかに上方に上昇しますが、ガラスの上部は影響を受けなくなります。
ウィンドウの端については、ウィンドーロはサイドスクレーパーでほぼ完全にクリーニングしますが、マイクロファイバーのように回転しないため、斜めから見たときにウィンドウにわずかに目立つ痕跡がある場合があります。 何年も掃除されていないほこりの多い窓は2回洗う必要があります。 2分後、窓の清潔な面が乾いた後、内面を掃除するためにモジュールを交換しました。 また、ロボットの車輪を掃除することをお勧めします。車輪にほこりや汚れが付着すると、車輪が滑り始めます。
メガネ間の距離が指示に記載されている距離と一致する場合、ウィンドーロはウィンドウの上部に完全に到達し、上部フレームに沿って掃除します。
以下のビデオで視覚的なテスト結果を見ることができます。
結論
窓洗浄ロボットは非常に興味深い製品であり、同時に適切な動作条件が必要です。 適切な条件(メガネ自体の厚さを考慮したメガネ間の幅は、30 mmを超えてはならず、15 mm未満である必要があります)。Windoroは、ウィンドウのクリーニングを非常にうまく行い、エッジにかすかなマークのみを残します。 もちろん、ロボットは主に必要なデバイスではありませんが、資金があれば、高層アパートや国の窓を安全に洗うのに役立ちます。 この記事の執筆時点では、このようなデバイスのシーズンはもう終わりに近づいていますが、ウィンドーロは屋内で使用したり、オリジナルのギフトになったりできます。 このようなガジェットでよくあることですが、最初はこれは単なるおもちゃであると考えますが、数週間使用すると「良いものに慣れます」。
デバイスの推奨価格はロシアのウインドロの公式代表者によって設定され、 19800ルーブルに達します。 そのようなガジェットを入手するか、クリーニング会社のサービスを使用するかは、常にあなた次第です。