
残念ながら、最近、宇宙船の打ち上げ中のさまざまな事故のトピックは関連性を失いません。そのため、(私自身の経験に基づいて)そのような緊急事態が発生したときにエンジニアが解決するタスクについてお話したいと思います。 この記事では、Briz-M上段の故障後のExpress-AM4通信衛星の動作完了の例を使用して、宇宙船の異常な打ち上げの場合に考えられるシナリオについて説明します。 また、緊急打ち上げ中の宇宙船の衝突のリスクを減らすために、世界で何が行われているかについても少しお話しします。
はじめに
最初に、あなた自身についてのいくつかの言葉。 私の主な仕事は、有人および無人宇宙船の地球への降下の弾道支援です。 これには、即時の運用作業とそのためのソフトウェアの開発の両方が含まれます。
今、いくつかの定義:
異常な打ち上げにより、宇宙船が設計されていない軌道に打ち上げられることを理解する必要があります。 オプションは、すぐに「何かがうまくいかなかった」とき、この場合何もできないので、考慮することは無意味です。
打ち上げ時に事故が発生した場合、なぜデバイスで何かをする必要があるのですか?
まず、計算されていない軌道上にある宇宙船は、他の動作中の車両に衝突の脅威をもたらす可能性があります。 さて、そして第二に、宇宙船とスペースデブリ(毎日その数が増加している)との衝突の場合、機内に残っている燃料の爆発と多数の破片の形成の可能性が高い。
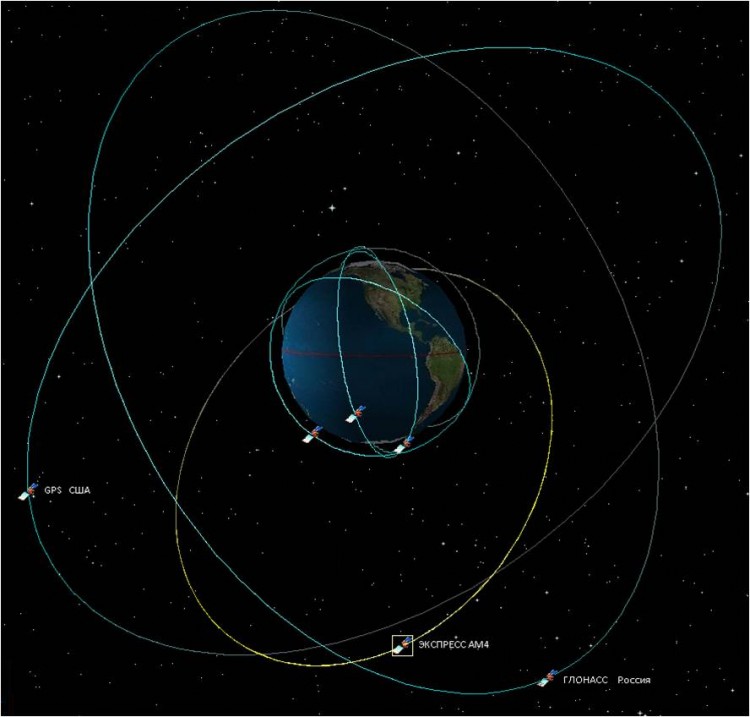
異常な軌道の一例は、Express-AM4衛星でした。 2011年8月、静止軌道(標高35,786 km)に打ち上げられ、公衆に電気通信サービスを提供することになっていた。 しかし、上段での事故により、軌道は最低高度655 km、最大20,430 kmのままでした。 この高度では、衛星はGPSやGLONASS星座を含む多数の宇宙船に脅威をもたらしました(高度は19,000〜20,000 km)。
イベント開発のオプション
復旧中の事故の種類に応じて、イベントをさらに発展させるための3つの主なオプションが考慮されます。
- 緊急事態を考慮に入れたミッションの継続。
- 安全な軌道へのデバイスの移動(埋没軌道)。
- 海洋の特定のエリアの洪水装置。
Express-AM4の場合、独自のエンジンを使用して静止軌道に到達することは不可能だったため、ミッションを継続するオプションは不可能でした。 この点で、最後の2つのオプションが詳細に検討されました。
安全な軌道から始めましょう(文字通り簡単に言えば)。 問題の本質は、軌道カタログを使用して、衛星が他の宇宙船に与える危険が最も少ない軌道のパラメータを決定し、その後、搭載されている燃料を最小限に抑えて、この軌道への飛行スキームを計算することでした。 その結果、埋没軌道は次の特性で選択されました:最小高度12,000 km、最大高度15500 km。 この軌道への飛行には、エンジンの3回の始動が必要でした。1回目は近地点を増やし、2回目は遠地点を下げ、3回目は燃料を完全に生成し、特定の軌道への最終移行を行います。
理論的には、埋葬の軌道を持つオプションは悪くありませんでしたが、実践の観点からは、実装するのがかなり困難でした(エンジンをオンにする間隔の特性、装置の向きの特性などのため)、および完全な開発で特定の軌道への正確なアクセスを保証すること誰も給油できませんでした。 したがって、主な選択肢は、海の特定の地域での衛星の洪水でした。
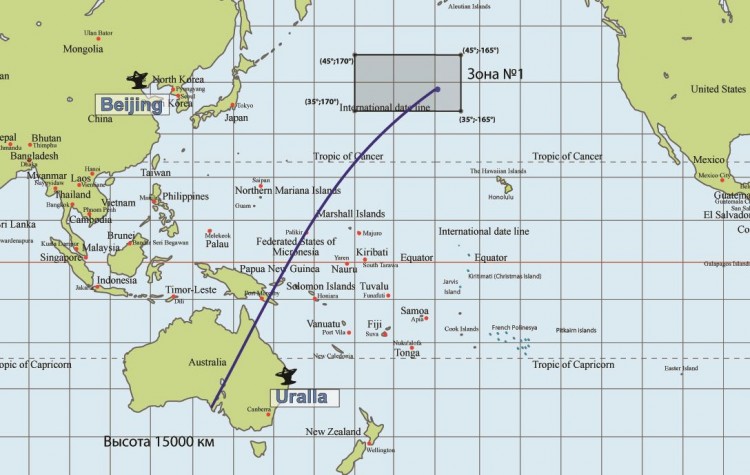
ここで少し説明する価値があります。軌道から何かを持ち出す前に、影響範囲をさまざまな組織と調整する必要があります。 ロシアは、南半球の太平洋地域を使用してプログレストラックに洪水を起こすことで合意しています。 したがって、「エクスプレス」の洪水時に、まず第一に、このエリアを狙うためのオプションが考慮されました。 しかし、軌道の特異性により(近地点の緯度の議論は北半球にあった)、この地域の使用は不可能でした。 北半球のある地域を探す必要がありました。 アメリカ西海岸と日本の間に勝るものはありませんでしたので、そこで急行をすることにしました。

また、保険のために予備エリアが選択されました(写真では小さくなっています)。 これらの地域での衛星洪水の可能性を正当化するために、さまざまな時間間隔で発生の軌跡が計算されました。 図からわかるように、それらはすべて所定の領域に落ちるという条件を満たしていました。
運用作業
次に、最も興味深いものがありました-直接実装。 すべての衛星制御はトゥールーズのMCCから行われ、すべての作業はフランスの同僚と共同で行われたとすぐに言わなければなりません。 承認された洪水計画は図に示されています。

少し説明します。宇宙船を非常に楕円形の軌道から縮小するには、近地点を下げながらピーク時に減速する必要があり、宇宙船は大気の密な層に入ります。 この場合、衛星のエンジンの推力により、ブレーキの衝撃を十分にすばやく処理できなかったため、衛星が推進システムの中央で軌道のクライマックスに到達するスキームが選択されました。 これにより、最大限の効率でブレーキインパルスを解決することができました。
信頼性を高めるために、彼らは地上ポイントの電波可視ゾーンの宇宙船で動的な操作を実行しようとします。 ロシアの領土ではなくエンジンがオンになり、中継衛星の国内軌道コンステレーションがあまり発達していないため、パートナーのウララ(オーストラリア)と北京(中国)の地上局を使用する必要がありました。 彼らによると、2012年3月25日 設計時には、エンジンのオンとオフが切り替わりました。 その後、特定の地域での衛星の洪水を確認する計算が行われました。
おわりに
宇宙技術の開発のこの段階では、打ち上げ中に緊急事態が発生した場合にすべてのデバイスが何もできるわけではありません。 これは主に、軌道に投入される各キログラムのコストが高いためです。 たとえば、静止軌道の衛星の動作時間を長くするために、電気推進システムが搭載されており、推力が非常に低くなっています。 そのようなエンジンを搭載した衛星での事故では、安全な軌道に切り替えたり、それをあふれさせることは不可能になります。
フランスの衛星メーカーとの会議で、彼らはhatch化中の偶発事象の受け渡しの可能性をさらに調査することに関心を表明しました。 現在、エンジンの追加設置の可能性を検討し、衛星のオリエンテーションシステムおよび他の多くのコンポーネントを開発するための作業が進行中です。 すぐに、衛星が緊急シャットダウン中に自律的にさらなる行動を決定できる機器を設置する可能性があります。
もちろん、1つの記事が地球への宇宙船の帰還のすべての機能に適合するわけではありませんが、まず最初に、それで十分だと思います。