
1964年に、NASAは宇宙飛行士を月に送ること、およびそれらを一緒に送る表面を研究するためのどんな種類の装置について考え始めました。 最初の選択肢はばかげていて奇妙でしたが、1969年、科学者たちはアポロ計画のために月面探査機の開発に真剣に取り組みました。 そして2年もたたないうちに、彼は月にいた。
最初のローバー
ジョージマーシャル宇宙飛行センターのNASA科学者は、月に宇宙飛行士を派遣することを最初に考えました。 衛星の研究に役立つ特別な装置が必要であることは明らかでした。 主な申請者は、3トンの重さの輸送プロジェクトで、2人用の密閉されたキャビンと最大100(!)キロメートル/時の速度で、広いエリアを研究することができました。 このプロジェクトはMOLABと呼ばれていました。

一部のエンジニアはさらに進んだ:将来、彼らはそのようなデバイスが月の周りを歩いたり、ったり、ジャンプしたり、飛ぶことさえできるようにすると申し出た。 月面探査車に乗組員を乗せるというアイデアは、1969年まで実現しませんでした。 4月7日、アポロ11号のミッション開始のわずか3か月前に、Wernher von BraunはMarnarhall Space Flight Centerで月面ローバーを開発するためにLunar Roving Task Teamを設立しました。
作業の開始時に、フォンブラウンは、宇宙飛行士がこのような輸送手段を利用できるとミッションの開始が大幅に複雑になることを認めました。追加機器の重量が増加し、プロジェクトのコストとリスクが増加します。 しかし同時に、チームリーダーは、月面探査機の助けを借りて、宇宙飛行士が月の表面を探索するのが簡単になることに気付きました-探査機に乗ることは、かさばる宇宙服で旅行するよりもはるかに便利です。
」
このプロジェクトは、アポロ11号の打ち上げ日までに期限内に完了することはできませんでしたが、著者は月面ローバーが次のアポロミッションで使用されると信じていました。
ムーンローバー開発
1970年初頭、NASAは月面ローバーを作成するためにボーイングと契約を結びました。 作業の過程で、ローバーは本格的なモバイルラボではなく、最小限の研究機能しか持たないことが明らかになりました。 さらに、プロジェクトは月に大気がなく、温度差が大きく、重力が弱く、表面が未知であるという事実によって複雑になりました。 したがって、ローバーは強力で、重く、信頼性が高くなければなりませんでした。

月面ローバーのデバイスと特性
デバイスの重量は210 kgで、月の引力-490 kg、長さ-3 m、ホイールベース-2.3 mの条件下での積載量でした。ローバーは、受動冷却システムを備えた2つの36ボルトの非充電式銀亜鉛電池で駆動しました。 各車輪には独自のエンジンがあり、ギアをシフトすることからデバイスを節約しました。 車輪は回転できるため、回転半径はわずか3メートルでした。 さらに、ローバーは直径70 cmまでの石の形の障害物を克服することができ、タイヤは月の土に引っかかる可能性を最小限に抑えたスチールワイヤーでできていました。

不慣れな場所で乗組員が迷子にならないようにするために、ローバーには、ジャイロコンパスと走行距離計で構成されるナビゲーションシステムと、グノーモンピンの影の動きの方位角を決定するデバイスがありました。 一般に、航法システムにより、宇宙飛行士は、たとえば着陸地点などの基準点を基準にして月面を航行することができました。 さらに、地球からのNASAは月面ローバーの動きを追跡することができました:高指向性の網状のパラボラアンテナが全方向性アンテナと同様に通信に使用されました。 カラーテレビカメラと16 mmムービーカメラ、および70 mmカメラが搭載されました。 熱保護システムでは、高温が機器に影響を与えることはありませんでした。
1971年の最初の月面探査機、アポロ15ミッション:

人的要因
主な疑問の1つは残っていました:かさばる宇宙服や月の重力の状態の宇宙飛行士はローバーを引き付けることができますか? この質問に答えるため、NASAのエンジニアは、地球上の月面の状態をシミュレートして、多数のテストと実験を実施しました。 宇宙飛行士も設計の改善に参加しました。これは、ローバーの改善に役立ちました。たとえば、シートベルトが追加され、より快適な乗員用シートが設計されました。
月に
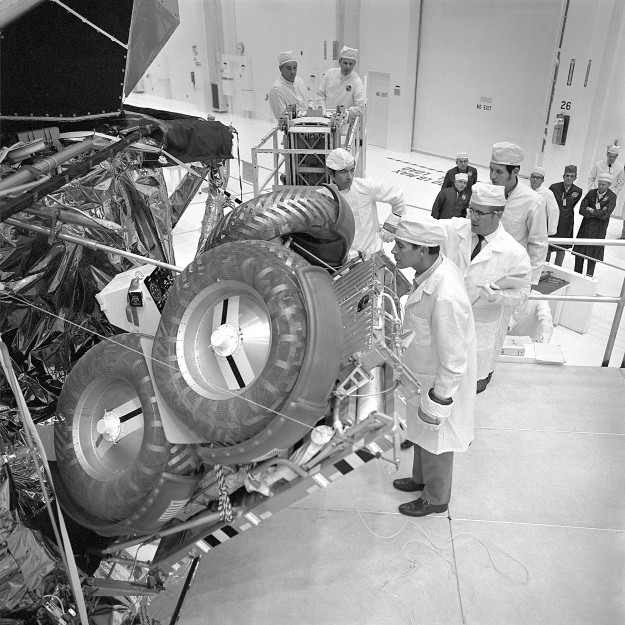
輸送のために、ローバーは月面モジュールの着陸ステージに取り付けられました。 ビルドプロセス:

アポロ15号のミッションで月面に初めて月面探査機が登場しました。 1971年7月31日。 宇宙飛行士のデイブ・スコットとジム・アーウィンはローバーをゆっくりと水面に降ろし、同時にすべてのノードの動作を確認してから、車輪が自動的に回転しました。 その後、宇宙飛行士は乗組員の座席を取り付けるだけで済みました。 このプロセスは、NASAコントロールセンターによってライブで監視されていました。

ローバーのおかげで、宇宙飛行士は月のモジュールからはるかに遠くに移動することができました。アポロ17ミッションでは、デバイスは着陸地点から7.6 kmの距離にありました。 さらに、ローバーを使用してさまざまな月の土壌サンプルを収集しました。
興味深い事実
アポロ17号の2回目の月面探検で、宇宙服のポケットにハンマーを持ったユージーンセルナン(他の情報源によると、ハリソンシュミット、遠征の地質学者)が誤ってハンドルで「月面ローバー」の翼を引っ掛けました。 この小さな(地球の基準による)問題は、宇宙飛行士にとって非常に重要になっています。
ムーンラバーの動きの間に、たくさんのほこりが上がり、翼が壊れて宇宙服と車両の要素にほこりが落ちました。ほこりがほとんど黒だったので、これは過熱の条件を作りました(宇宙服が白で作られていることは何のためでもありません)。 NASAのエンジニアは問題を解決するために一晩中働き、午前中に宇宙飛行士に指示を伝え、その結果、翼はダクトテープで接着されました。
UPD: kbtsiberkinは、粘着テープとカードのセット( Source )でシールされた翼の写真を追加しました:

参照資料
-記事少し前のことですが、宇宙飛行士は月をロービングしました
-MOLABプロジェクトの詳細
-ウィキペディアの月車
- ローバーの性能特性の詳細
