
SOINNは、自己組織化インクリメンタルニューラルネットワークです。 このようなニューラルネットワークの構造とアルゴリズムは、日本の研究所長谷川(ウェブサイトhaselab.info )でうまく機能したようです。なぜなら、それは最終的に基礎として採用され、人工知能アルゴリズムのさらなる開発は、SOINNネットワークへの小さな修正とアドオンを経たからです。
SOINNコアネットワークは2つの層で構成されています。 ネットワークは入力ベクトルを受け取り、トレーニング後の最初の層でノード(ニューロン)-入力データの定義クラスを作成します。 入力ベクトルが既存のクラスに類似している場合(類似性の尺度は学習アルゴリズムの設定によって決定されます)、最初の層の2つの最も類似したニューロンは通信によって結合されます。または、入力ベクトルが複数の既存のクラスのように見えない場合、現在のクラスを定義する新しいニューロンが最初の層に作成されます 接続によって結合された最初の層の非常に類似したニューロンは、1つのクラスとして定義されます。 最初の層は2番目の層の入力層であり、同様のアルゴリズムに従って、いくつかの例外を除いて、2番目の層にクラスが作成されます。
SOINNに基づいて、そのようなネットワークは次のように作成されました(以下はネットワークの名前とその作成者によるネットワークの説明です)。
ESOINN-ニューラルネットワークの拡張SOINNは、外部からの介入や学習タスクの設定なしでオンラインで学習します。 これは、オンラインの制御されていない分類およびトレーニングトポロジ用のSOINNネットワークの改良バージョンです。 1-このネットワークは、SOINNの2つの層ではなく、1つの層で構成されています。 2-重なりの密度が高いクラスター。 3-SOINNよりも少ないパラメーターを使用します。 4-それはSOINNよりも安定しています。 デモデータと実際のデータの実験では、ESOINNがSOINNよりも優れていることが示されています。
SOINNに基づくASCデータ分類器。 プロトタイプの数を自動的に決定し、すでに保存されている情報を削除せずに新しい情報を同化します。 ノイズの多いデータに耐性があり、分類は非常に高速です。 実験では、ASCを説明するためにデモデータと実際のデータセットの両方を使用します。 さらに、エラー分類、圧縮、分類速度に基づいて、ASCを他の分類子ベースの結果と比較します。 結果は、ASCのパフォーマンスが優れており、非常に効果的な分類器であることを示しています( オリジナルへのリンク )。
GAM-一般連想メモリ(GAM)は、別のタイプの連想メモリ(AM)の機能を組み合わせたシステムです。 GAMは、入力層、メモリ層、および連想層の3つの層で構成されるネットワークです。 入力層は入力ベクトルを受け入れます。 メモリ層は、入力を同様のクラスに保存します。 連想層は、クラス間の連想関係を構築します。 GAMは、バイナリまたは非バイナリ情報を保存および呼び出し、多対多の関連付けを構築し、静的データと情報の時系列の両方を保存および呼び出します。 不完全な入力データやノイズの多いデータがある場合でも、情報を呼び出すことができます。 静的データと時系列データを受信するリアルタイムバイナリデータ実験は、GAMが効率的なシステムであることを示しています。 ヒューマノイドロボットを使用した実験で、彼はGAMが実際の問題を解決し、異なるサイズのデータ構造間の関係を構築できることを実証しています( オリジナルへのリンク )。
新しい STAR-SOINN(統計認識-自己組織化およびインクリメンタルニューラルネットワーク)-スマートロボットを構築するには、人、彼の環境、インターネットから一貫して迅速に学習する自律型ロボットのサイキックシステムを開発する必要があります。 したがって、当社はSTAR-SOINNネットワークを提供します。これは、リアルタイムで学習し、インターネットを介してさらに学習する機能を備えた、超高速のマルチモーダルネットワークです。 この教育方法を評価する実験を行い、その結果を他の教育方法と比較しました。 結果は、条件を単に追加するシステムよりも認識精度が高いことを示しています。 さらに、提案された方法は非常に高速に動作します(オブジェクトを調べるのに約1秒間、オブジェクトを認識するのに25ミリ秒)。 アルゴリズムは、既知のオブジェクトの属性情報を検索することにより、「不明な」オブジェクトの属性を識別することができました。 最後に、このシステムが将来のロボットの基礎となる技術になる可能性があると判断しました。
SOIAMは、連想メモリ用のSOINNの修正版です。
SOINN-PBR-条件を使用してルールを作成するためのSOINNの修正if-> then(if-then)
AMD(自律精神発達)-このアルゴリズムを使用してさまざまな問題を解決する方法を学ぶロボット。
ここで、SOINNアルゴリズムのブロック図を見ることができ ます。
いくつかの種類のSOINNネットワークを英語で記述し、ロシア語でメモを作成した場所へのPDF形式の雑誌へのリンク(私はrarアーカイブにアーカイブを詰めました、雑誌の元のサイズは20 mbです( オンラインで読む )、アーカイブのサイズは13 mbです( アーカイブをダウンロードする ))。
いくつかの種類のSOINNネットワークを英語で記述し、ロシア語でメモを作成したPDF形式の別の雑誌へのリンク(私はアーカイブをrarアーカイブに詰め、雑誌の元のサイズは4mb( オンラインで読む )、アーカイブサイズは2.5mb( アーカイブをダウンロードする )
ロシア語のインターネットには、このアルゴリズムに取り組んでいるロボットが提起した問題の解決策を見つけるSOINNネットワークに関する記事が数件しかありません。問題の解決方法を説明しなかった場合、インターネットに接続してそこで解決策を探します。 しかし、アルゴリズムとコードの操作の例は見つかりませんでした。 ロボクラフトに関する記事は1つしかなく、OpenCVと組み合わせた基本的なSOINNネットワークアルゴリズムの動作の小さな例が示されています。 誰かがSOINNネットワークを実験している場合、可能であれば、コードを見るのは興味深いでしょう。
2006年に、制御されていない学習(教師なしの自己学習)を提供するために、自己組織化ニューラルネットワーク(SOINN)と呼ばれる段階的(増分)学習の方法が提案されました。 SOINNは、非定常データをオンラインで適切に処理し、定義されたクラスターの数を報告し、確率密度確率分布を考慮して、入力データのトポロジ構造を提示します。 SOINNネットワークの変形を提案したHas川は、彼のネットワークの結果をGNGネットワーク(神経ガスの拡大)と比較し、SOINNネットワークの結果はGNGよりも優れていました。
SOINNネットワークには次のような問題がありました。
1. 2つの処理層で構成されているため、ユーザーはネットワークに参加する必要がありました。 ユーザーは、第1層の学習を停止するタイミングと、第2層の知識の取得を開始するタイミングを決定する必要がありました。
2.グループの密度が高い場合、ネットワークは認識にうまく対処しましたが、グループのネットワークが部分的に重複している場合、ネットワークはそれが1つのグループであると見なし、それらを結合しました。
これらの問題を解決し、ネットワークアーキテクチャを簡素化するために、自己組織化を強化したSOINNベースのネットワークが提案され、ESOINNと呼ばれました。
SOINNの簡単な概要。
Soinnは、2つの層を持つネットワークで構成されています。 最初の層は、入力データの分布密度を調査し、ノードとノード間の関係を使用してデータ分布の結果を表します。 2番目のレイヤーは、最も低い分布密度のデータを最初のレイヤーで検索し、それらのグループを識別し、最初のレイヤーよりも少ないノードを使用して、調査対象のデータのトポロジ構造を提供します。 2番目の層のトレーニングが完了すると、SOINNは見つかったグループの数を報告し、入力データをそのグループに最適なグループに割り当てます。 第1層と第2層は同じアルゴリズムに従って機能します。
入力ベクトルがネットワークに適用されると、入力ベクトルに最も近いノード(勝者)と2番目に近いノード(2番目の勝者)が検出されます。 ネットワークは、しきい値の類似性基準を使用して、入力ベクトルが勝者と2番目の勝者と同じグループに属しているかどうかを判別します。 最初のSOINN層は、入力データの分布基準が事前にわからないため、各ノードの類似性しきい値を個別に適応的に更新します。
ノードiに隣接ノードがある場合、このノードiとその隣接ノードとの間の最大距離を使用して、類似性しきい値Tiが計算されます。
フォーミュラ1A

ここで、Ti(類似性しきい値)は、ノードiの最も遠い近傍までの距離です。 Wi-ノードiの重み、Ws-隣接ノードiの重み
ノードiに隣接ノードがない場合、類似性しきい値Tiは、ベクトルiとネットワーク上で利用可能な最も近いベクトルとの間の距離として計算されます。
フォーミュラ1B

ここで、Wnはノードiを除くネットワークノードの重みです
入力ベクトルと勝者または2番目の勝者の間の距離がそれぞれ勝者または2番目の勝者の類似度しきい値よりも大きい場合、入力ベクトルは新しいノードとしてネットワークに挿入され、新しいクラスの最初のノードを表します。 この挿入は、クラス間の挿入と呼ばれます。これは、新しいクラスが将来既存のクラスとして分類される場合でも、この挿入によって新しいクラス生成が作成されるためです。
入力ベクトルが勝者または2番目の勝者として1つのクラスターに属すると定義され、勝者と2番目の勝者を接続する接続がない場合、その接続を使用して勝者と2番目の勝者を接続し、この接続の経過時間を0に設定します。 勝者と関連するすべての関係の年齢をさらに1つ増やします。
次に、勝者とその隣接ノードのベクトルの重みを更新します。 ノードiを入力で使用して勝者ノードを見つけ、ノード変数-Victory_Numberでノードiが勝者であった回数を示します。
式に従って勝者の重みを変更します。
フォーミュラ1C

ここで、Wwinは勝者の重み、Cwinは勝者の勝利数、Wiは入力ベクトルの重みです
次の式に従って、勝者のすべての隣人の重みを変更します。
フォーミュラ1D

Wswinは勝者の隣人の重み、Cwinは勝者の勝利数、Wiは入力ベクトルの重み
ノード間の接続の経過時間が定義済みのMaximum_Age_Connection_パラメーターよりも大きい場合、この接続を削除します。
定義済みのタイマーパラメーターLearning_timeが反復ネットワークトレーニング中に終了すると、SOINNはトレーニングの時間が終了したことを理解し、トポロジマップ内の累積誤差が最大になるポイントに新しいノードを挿入します。 挿入によってエラーのサイズを削減できない場合、ノードの挿入をキャンセルします。 クラス内で挿入が行われるため、この挿入はクラス内での挿入と呼ばれます。 また、この挿入中に新しいクラスは作成されません。 次に、SOINNは、近隣の数が1以下のノードを見つけ、そのようなノードが低密度の領域にあるという仮定に基づいてそのようなノードを削除します。 このようなノードは、ノイズノード(ノイズの多いノード)と呼ばれます。
実際、最初のSOINN層の類似性しきい値は適応的に更新されるため、累積誤差は高くなりません。 したがって、クラス内への挿入はほとんど役に立ちません。 クラス内への挿入は、最初のレイヤーには必要ありません。
第1層の反復学習時間が経過すると、第1層の学習結果が入力として第2層に送られます。 2番目のレイヤーは、最初のレイヤーと同じ学習アルゴリズムを使用します。 2番目のレイヤーでは、類似性のしきい値(Ti)は一定です。 クラス内の距離とクラス間の距離を使用して計算されます。 最初の層とは異なり、類似性の大きな一定のしきい値を使用すると、2番目の層のノードの累積誤差が非常に大きくなります。この場合、クラス内の挿入は学習プロセスで大きな役割を果たします。 大きな一定の類似性しきい値を使用すると、2番目のレイヤーは、最初のレイヤーのトレーニング中に削除されずに残っているノイズの多いノードを削除することもできます。
2層のSOINNネットワークには、次の欠点があります。
最初の層の学習を停止し、2番目の層の学習を開始するタイミングを選択することは困難です。
最初の層の調査結果が変更された場合、2番目の層の調査結果はすべて破棄されるため、2番目の層の再分類が必要になります。 SOINNの2番目の層は、段階的なオンライン学習には適していません。
クラス内への挿入は2番目のレイヤーに必要ですが、多くのユーザー定義パラメーターが必要です。
SOINNは不安定です-部分的に重複する高密度のクラスを分離できません。
前述の欠点を取り除くために、開発者は、SOINNの2番目のレイヤーを削除し、2つのレイヤーを持つSOINNよりも1つのレイヤーがより良い分類結果を得るためにいくつかの方法を変更しました。 このようなネットワークはESOINNと呼ばれます。
ESOINNは、単一のレイヤーでデータを取得します。 クラス間に挿入するために、SOINNと同じアルゴリズムが使用されます。 ノード間のリンクを作成するときに、ESOINNはリンクを作成するかどうかの条件を追加します。
Learning_Timeタイマーの期限が切れると、ESOINNはノードを異なるサブクラスに分離し、重複した領域にあるリンクを削除します。 ESOINNは、クラス内で挿入を使用しません。
2番目の層を削除すると、ESOINNは2層のSOINNよりも継続的(増分)オンライン学習に適したものになります。 また、第1層を完了して第2層を開始する時期を決定する困難さもなくなります。 クラス内への挿入を拒否すると、そのような挿入の実装に必要な5つのパラメーターがネットワークから削除され、ネットワーク操作アルゴリズムの理解が簡素化されます。
ESOINN運用アルゴリズム
重複するクラス(互いにクラスが部分的に重複する)。 ノードの密度を決定する方法について説明します。どのメソッドを使用して、あるクラスと別のクラスのオーバーラップを見つけることができるか、勝者と2番目の勝者の間の接続を構築する必要があるかどうかについて説明します。 オーバーラップ領域のノードの空間分布の密度は、クラスの中心よりも低くなります。
結び目密度
ノードの密度は、例(入力データ)の数のローカル累積によって決定されます。 ノードの近くに多くの入力サンプルがある場合、ノードの密度は高いと見なされ、ノードの近くに多くの入力サンプルがない場合、ノードの密度は低いと見なされます。 したがって、ネットワークがトレーニングを行っている時点で、このノードの密度を示す変数was_winnerでノードが勝者であった回数を考慮する必要があります。 ノードの密度は、SOINNなどのアルゴリズムによって決定できます。 ここには次の問題が表示されます。
1.高密度の領域にある多数のノードがあります。 高密度エリアでは、ノードが勝者になる可能性は低密度エリアよりも大幅に高くなることはありません。 したがって、node_winnerを使用してその密度を測定することはできません。
2.トレーニングの成長するタスクでは、以前の段階で作成された一部のノードが再び長い間勝者になりません。 was_winnerの定義を使用すると、このようなノードは、トレーニングの後の段階で低密度のノードとして評価できます。
ESOINNは、新しい密度の定義を使用して、上記の問題を解決します。 基本的な考え方は、入力例(データ)の数のローカル累積と同じですが、「数値」のスペースを占める「ポイント」を決定し、ノードの累積ポイントの平均を使用してこのノードの密度を記述します。 1つの特別なノードにのみ接続するwinner_とは異なり、ノードのポイントPを計算するときに、ノード間の関係が考慮されます。 まず、平均距離を計算します
 近隣からのノードi。
近隣からのノードi。
フォーミュラ1

ここで、mはノードiの近傍の数、Wiはノードiのベクトルの重み、Wjは近傍iのベクトルの重み
次に、ノードiのPOINTを次のように計算します。
フォーミュラ2
^ {2}}") ノードiが勝者の場合
ノードiが勝者の場合
 ノードiが勝者でない場合
ノードiが勝者でない場合
POINTの定義から、ノードiからその隣接ノードまでの平均距離が大きい場合、この領域内のノードの数は少ないことがわかります。 したがって、ノードの分布はまれであり、この領域の密度は低くなります。 したがって、ノードiに低いPOINTを与えます。 平均距離が短い場合、これは、このエリアのノードの数が多く、このエリアの密度が高いことを意味します。 したがって、ノードiに高いポイントを与えます。 1回の反復で、ノードiが勝者である場合にのみノードiのDOTSを計算します。 この反復での他のノードのDOTSは0です。したがって、1つの反復では、勝者の累積DOTSは変更されますが、他のノードの累積DOTSは変更されません。
POINTS Siの累積は、ノードiのトレーニング期間中のDOTSの合計として計算されます。
フォーミュラ3
")
ここで、sigは1つのトレーニング期間中の入力信号の数です。 n-トレーニング期間の時間を示します(これはLT / sigとして計算できます。LTは入力信号の平均総数です)。
したがって、ノードiの平均累積POINT(密度)を取得します
フォーミュラ4
")
ここで、Nは累積Si POINTSが0より大きい期間の数を表します。Nは必ずしもnと等しくないことに注意してください。 nを使用してスペースNを取得することはありません。トレーニング期間にわたって学習を増やすために、累積Si POINTSは0になるためです。nを使用して累積POINTSの平均を計算すると、調査対象の古いノードの密度が低下します。 累積DOTSの平均を計算するためにNを使用すると、生涯学習中でも、これらのノードに近い新しい信号がシステムに送信されない場合、調査対象の古いノードの密度は変化しません。 ただし、一部のアプリケーションでは、非常に古い学習情報を忘れる必要があります。 このような場合、nを使用してスペースNを取得する必要があります。したがって、新しい知識を学習し、非常に古い知識を忘れることができます。 学習したすべての知識をネットワークに残すには、Nを取得してノードの密度を決定する必要があります。
クラス間の重複領域を検索します。
密度の決定に関して、重複領域を見つける最も簡単な方法は、低密度の領域を探すことです。 GCSやSOINNなどの一部の方法では、この手法を使用して重複領域を特定します。 ただし、この手法では、低密度領域が正確に重複領域であることを保証できません。 たとえば、ガウス分布に従う特定のクラスでは、クラス境界で密度が低くなります。 オーバーレイには、重複するクラスの境界が含まれます。 したがって、重なりの密度は、覆われていない境界領域よりも大きくなければなりません。 この問題を解決するために、ESOINNは最低密度ルールを使用せず、重なった領域を見つけるための新しい手法を作成します。
SOINNでは、トレーニング期間後、クラス間に重複がある場合、そのようなクラスのすべてのノードが結合されて1つのクラスが形成されます。 私たちの目標は、複雑なクラス(多くのグループを含む)で重複する領域を見つけ、異なるクラス間の新しい関係の構築を回避し、重複するクラスを効果的に分離することです。
重複領域を検出するには、最初に次のルールを使用して複雑なクラスを複数のサブクラスに分割する必要があります。
アルゴリズム1.複合クラスのサブクラスへの分割
1.ノードの局所密度が最大の場合、ノードをサブクラスの頂点と呼びます。 複雑なクラスのすべての頂点を見つけ、各頂点に異なるラベルを付けます。
2.他のすべてのノードを、頂点と同じサブクラスラベルで分類します。
3.接続されたノードが異なるサブクラスラベルを持っている場合、各ノードはオーバーラップエリアにあります。
この方法は理にかなっているように見えますが、実際のタスクでは、いくつかの問題が発生します。 たとえば、ノードの密度分布が平滑化されず、ノイズの存在に似ている2つのクラスがあります。 アルゴリズム1では、これらの2つのクラスは非常に多くのサブクラスに分割され、多くの重複領域が検出されます。 複雑なクラスを細分化する前に、入力データを平滑化する必要があります。

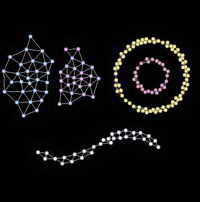
図1
図1では、2つの非平滑化入力クラス。
図1からサブクラスAとサブクラスBを取得します。サブクラスAの頂点の密度がAmaxで、サブクラスBの頂点の密度がBmaxであるとします。 次の条件に該当する場合、サブクラスAとBを1つのクラスに結合します。
もし
フォーミュラ5
> L_ {A} A_ {max}")
または
フォーミュラ6
> L_ {B} B_ {max}")
ここで、勝者と2番目の勝者は、サブクラスAとBのオーバーラップ領域にあります。実際、Lは[0,1]に属するパラメーターであり、しきい値関数を使用して自動的に計算できます。
フォーミュラ7

ここに
 サブクラス内のノードの平均密度です。
サブクラス内のノードの平均密度です。
フォーミュラ8

ここで、NはサブクラスAのノードの数です。
したがって、複合クラスをさまざまなサブクラスに分割し、サブクラスをオーバーラップせずに1つのサブクラスに結合すると、複合クラス内で重複した領域を見つけることができます。 重複する領域を見つけたら、異なるサブクラスに属する手綱間の結合を削除し、重複するクラスを分離します。
アルゴリズム2.ノード間のリンクの作成
1.勝者と2番目の勝者が新しいノードである場合、2つのノードをリンクで接続します(これらのノードが属するサブクラスはまだ定義されていません)
2.勝者と2番目の勝者が同じサブクラスに属する場合、2つのノードを通信で接続します。
3.勝者がサブクラスAに属し、2番目の勝者がサブクラスBに属する場合。式5と6が満たされている場合、これらのノードをリンクで接続し、サブクラスAとBを結合します。そうでない場合、これらのノードをリンクで接続せず、これらのノード間の接続が既に存在する場合、削除します。
勝者と2番目の勝者が異なるサブクラスに属する場合、アルゴリズム2を使用します。この場合、ESOINNはこれら2つのノードに接続で接続する機会を与えます。 これにより、サブクラス化中のノイズの影響を制限し、サブクラスの振動を滑らかにすることができます。 2つのサブクラスが誤って分離されている場合、サブクラスは依然として相互に関連できます(たとえば、図1のサブクラスAとサブクラスB)。
アルゴリズム2は、ESOINNの結果がSOINNネットワークの結果よりも安定することを示しています。重複の密度が低くても、SOINNは異なるクラスを正しく分離し、異なるクラスを1つのクラスとして認識することがあるためです。 ESOINNは、平滑化方法を使用して、このような重複するクラスを安定して分割できます。 ESOINNは、過度の分離の問題も解決します。
ノイズによるノードの削除
ノイズに起因するノードを削除するために、SOINNは非常に低い確率密度の領域のノードを削除します。 SOINNはこの戦略を使用します。生成される入力信号の数がまだパラメーターの倍数である場合
 、隣接ノードが1つしかないノード、または隣接ノードがまったくないノードを削除します。 1次元入力および低ノイズデータセットの場合、SOINNは削除される候補ノードからの信号数のローカル累積を使用して、削除の動作を制御します。 さらに、SOINNネットワークの2層構造では、2番目の層がノイズによるノードの除去に役立ちます。
、隣接ノードが1つしかないノード、または隣接ノードがまったくないノードを削除します。 1次元入力および低ノイズデータセットの場合、SOINNは削除される候補ノードからの信号数のローカル累積を使用して、削除の動作を制御します。 さらに、SOINNネットワークの2層構造では、2番目の層がノイズによるノードの除去に役立ちます。
ESOINNでは、SOINNとほぼ同じノイズ除去技術を使用します。 これまでに生成された入力信号の数がパラメーターの倍数である場合
、トポロジの隣接が2以下である(<= 2)ノードを削除します。 ESOINNとSOINNの違いは、2つのトポロジー隣接ノードを持つノードも削除することです。 POINTSのローカル累積とさまざまな制御パラメーターC1(2つの隣接ノード用)およびC2(1つの隣接ノード用)を使用して、ノードを削除する動作を選択します。 , ESOINN , SOINN. SOINN . ESOINN, . 1 .
1 2 . 1 5, 5 3, 3 2. 1 2 .
, . , . , . , . , SOINN.
3.
1. .
2. i . i Ci
3. , i. i.
4. 2 , .
, ESOINN
4. ESOINN
1. , . , ⊂×
2.

3. () a1 ( ) a2 :


ξ a1 a2
 または
または  , 2 . T 1 1
, 2 . T 1 1
4. a1 1
5. 2 a1 a2.
) : a1 a2 , 0; a1 a2 , a1 a2 0.
) : a1 a2 , a1 a2.
6. 4.
7. 1
 、
、 =M_{a_1}(t)+1")
8.
") そして
そして ") .
.
(\xi - W_{a_1})")
(\xi - W_{i})") i a1
i a1
SOINN
=\frac{1}{t}") そして
そして = \ frac {1} {100t}")
9. ,
 .
.
10. λ:
) 1
) :
1. , a ,
 , a.
, a.  – .
– .
2. ,
 , .
, .
3. , , .
11. , 3; , .
12. 2 .
, . . , λ . , . λ . , , . ; . , . . , . ; . , , .
ESOINN
.
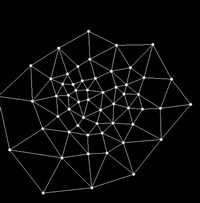
№ 1 Hasegawa SOINN. , . 10% . , , SOINN , . . . , , № 1 ( 1). .

1. № 1
2. ESOINN № 1
3. ESOINN № 1
ESOINN . λ=100,
=100, c1=0.001 c2=1. 2 ; 3 . ESOINN . ESOINN SOINN .
№ 2 ( 4), , SOINN ESOINN. 10% . , , . . , , . 1. 10000 , 2. 10000 , 3 . , , .
4. № 2
5. SOINN № 2
6. SOINN № 2
5 6 SOINN ( : λ=200,
=50, c =1 , Shen, F., & Hasegawa, O. (2006a). An incremental network for on-line unsupervised classification and topology learning. Neural Networks, 19, 90–106.) SOINN .

7. ESOINN № 2

8. ESOINN № 2
7 8 ESOINN ( : λ=200,
=50, c1=0.001 c2=1). SOINN, ESOINN . , . № 2 , ESOINN , SOINN.
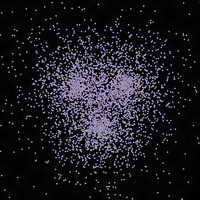
10 AT&T_FACE ; 10 ( 9). 92112 , 256 . . , 92112, 2328 . 2328 width=4, q=2 2328 ( 10)

9.

10.
, . 1, 1000 , 2 . : λ=25,
=25, c1=0.0 c2=1.0. , ESOINN 10 ( ) . . SOINN, (90% 86% ).
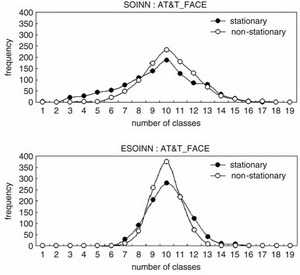
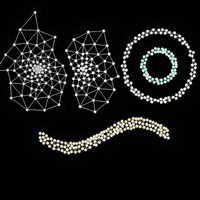
11.
SOINN ESOINN, 1000 . 11 SOINN, 11 – ESOINN. SOINN (2-16) , ESOINN (6-14); 10 SOINN ESOINN, , ESOINN , SOINN.
, Optical Recognition of Handwritten Digits database (optdigits) ( www.ics.uci.edu ˜mlearn/MLRepository.html ) SOINN ESOINN. 10 ( ) 43 , 30 13 – . 3823 , 1797 . 64.

12. . SOINN, ESOINN
-, SOINN ( λ=200,
=50, c =1.0 ). SOINN 10 . , 12, SOINN. SOINN . 92,2%; 90,4%. 100 SOINN. 6 13 ( ).
ESOINN. (λ=200,
=50, c1=0.001 c2=1), ESOINN 12 . 12 ESOINN. ESOINN 1 9 , 1 1' 9 9'. SOINN , 1' 9'. ESOINN 1 1' (9 9'), .
ESOINN . 94,3% 95,8%. 100 ESOINN. 10 13 .
, ESOINN , SOINN. ESOINN SOINN.
おわりに
ESOINN, SOINN. SOINN, ESOINN . ESOINN () . ESOINN , . ESOINN . ESOINN SOINN. , ESOINN SOINN.
, Learning Vector Quantization (LVQ). . , . , , . ESOINN SOINN , , ESOINN . . ESOINN .
- ESOINN
ESOINN 1,8 . ( )
ESOINN , . .
Github SOINN ++ ( )
SOINN OpenCV ( SOINN )