免責事項! 著者は、いずれにしても、彼らのための新しい分野での経験不足のため、究極の真実を保証するものではありません。 重大な技術的エラーが発生した場合は、できるだけ早く報告してください。
どういうわけか、初心者プログラマーと初心者の電子技術者の運命を結び付けました。 そして、彼らは創造し始めました。 彼らは録音モジュールで数十個の小さなテディベアを作り、単機能ボードを使用するのはそれほど面白くないことに気付きました。 そして、明るい夏の夜に彼らは集まり、何をそんなに面白いと思いましたか? 運命は彼らに2度目の助けをしました。彼らはロシアでSTM32VLDiscoveryデバッグボードの販売の広告を見つけ、1週間後に握手をしてLEDを「点滅」させてパッケージを開梱しました。 小さなデバイスに対する完全な力の感覚は彼の目に火をつけ、脳を獲得しました。 新しい「おもちゃ」の可能性を最大限に活用して、興味深い機能を備えた「電子ブレスレット」を作ることが決定されました...
STM32の使用方法について学習したとき、彼の目はさらに明るくなりました。 まず、あらゆる種類の周辺機器を接続することを考えました。 私たちの手には、ソビエト時計の7セグメントLCDがありました。 接続してタイマーを作成しましたが、落ち着きませんでした...
翌日、私たちはサービスセンターの小さな店に入り、膨大な数の解析する電話にd然としました。過去数年の携帯電話のさまざまな「ヒット」で完全に満たされた3台のスタンド。 わずか80ルーブルの場合、シーメンスC55が購入され、後に私たちのドナーになりました。
ケースを開いて、 ITを得ました。解像度が102 x 64ピクセルのモノクロLPH7999-4 LCDスクリーンです。 実際には、LCDマトリックスとPCF8812コントローラーで構成されています(データシートへのリンク) 。 コントローラーはDDRAMで構成され、ピクセル(1 \ 0)の状態、I \ Oバッファー、複数の電流ジェネレーター、および論理要素がビット単位でテーブルに保存されます。 LCDを使用したすべてのアクションは、VDD、SCK、MISO、DC、SS、GND、VOUT、RESの8本の脚を介してコントローラーを使用して直接行われます。そのうち2つはコンデンサを介して閉じ、残りはプロセッサの脚に接続します。
同時に、「これらはどのようなあいまいな指定であり、これをどのように制御できるのでしょうか?」 完全な悲しみと絶望感の表現で、私たちはグーグルを始め、未知の用語でいっぱいの記事に絶えずぶつかりました。 その結果、私たちの頭の中で数日後、少し新しい情報がレイアウトされました。


| MOSI(またはSIMO、SDO、DO、DOUT、SO、MTSR)
マスター出力スレーブ入力 | マスター出力。スレーブ入力に接続する必要があります |
| MISO(またはSOMI、SDI、DI、DIN、SI、MRST)
マスター入力スレーブ出力 | スレーブ出力が供給されるマスター入力 |
| SCK(またはSCLK、CLK)
| MISO \ MOSIからビットを解析するために提供されるクロック周波数 |
| SS(またはCS)
| 使用する周辺機器の選択。
複数のデバイスがある場合、特定のデバイスで作業するには、選択したデバイスのジャンパーフットをオフにし、他のすべてのデバイスでオンにします。 |
したがって、LCDを制御するには、周辺機器と通信するための標準化されたインターフェイスであるSPIを使用する必要があります。 それを使用するには、仕事の原則とそれに関連するすべての用語、特にすべての脚の名前と目的を理解する必要があります。
SPIインターフェースは、すべてを制御する1つのデバイス(マスター)と、センサー、LCD \ LCD、メモリカード、ADC \ DACなどの多くの制御された周辺機器があることを前提としています。 (奴隷)。 マスターでは、データの受信/送信用に3つのレッグと、n個のレッグジャンパーを選択する必要があります。nは接続された周辺機器の数です。 スレーブデバイスでは、受信/送信のレッグは通常事前に定義され(もちろん、これが別のプロセッサでない場合)、対応するデータシートに記載されています。
抽象マスターと1つの抽象スレーブデバイス間でデータを送受信する操作の例を見てみましょう。
注! SPIは次のように構成されています。データがMOSIマスターからMISOスレーブに転送されると、データはMOSIスレーブからMISOマスターに同時に転送されます。 したがって、SCK信号はそれぞれMISOとMOSIで同じであり、同じように機能します。
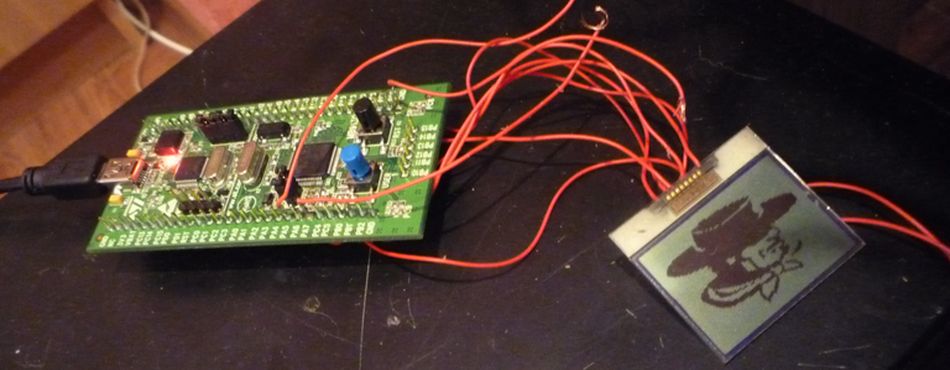
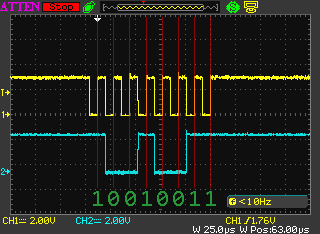
1バイトを送信する場合、SCKおよびMOSI出力が関係します。 SCKクロックパルスを出力します(論理ゼロから論理ユニットへの電圧降下)。 論理ユニットを送信する場合、出力電圧は〜3.3V、ゼロを送信する場合はそれぞれ〜0Vです。 論理ゼロおよび論理ユニットの状態の期間は等しく、プログラムで設定されます。 1バイトを送信すると、各ビットにインパルスが落ちます。 したがって、SCK出力、バイト転送では、8つの同一の「ハンプ」が見られます。 MOSIの出力では、情報が直接送信されます。 たとえば、10000001を送信すると、信号は大きな穴のように見え、10011001の場合は、中央に突起のある穴のようになります。 両方の出力が個別にどのように機能するのかは明らかだと思います。今度は、それらが互いにどのように調整されるかについて説明します。
アイドルモード。 何も送信されない瞬間、つまり、バイトの送信間隔またはSPIがオンになっている送信の開始前。 両方の入力に操作がない場合は0になると想定するのは論理的です。しかし、アイドルモードでは、MOSIの論理ユニットの電圧、SCKの電圧は論理ユニットまたはゼロです。 このSCKの状態は、自分で選択できます。
送信モード。 ここで、SCKポートとMOSIポートのインパルスの調整方法を選択する必要があります。 これを行うには、いくつかの悪い言葉を入力する必要があります。
前面は、ある状態から別の状態への遷移、つまり、論理ユニットから論理ゼロへの電圧ジャンプです。 インパルスのイメージでは、これらは垂直の棒です。
正面は上昇と下降です。上昇-論理ゼロから論理ユニットへの移行、下降-反対に、論理ユニットから論理ゼロへの移行。
前部も前部と後部です。前部前部はアイドルモード後に発生した最初のジャンプで、後部前部はアイドルモード後に発生した2番目のジャンプです。
開発者は、SCKアイドルモード(論理ユニットまたはゼロ)と送信モード(リーディングエッジまたはトレーリングエッジ)を選択できます。 合計で、4つの動作モードがあります。
モード0(00):
ダウンタイムは論理ゼロです。
フロントエンド送信。
SCKで論理ゼロ電圧から論理ユニット電圧への移行中にリーディングエッジ送信を選択したため、MOSIでビット送信が発生します。
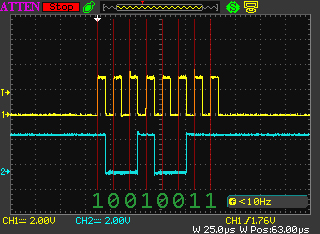
モード1(01):
ダウンタイムは論理ゼロです。
リバースギア。
立ち下がりエッジで送信を選択したため、最初に立ち上がりの立ち上がりエッジがあり、次に論理ゼロ電圧がしばらく保持され、次に立ち下がりのエッジがあります。 その後、MOSIでビット送信が行われます。
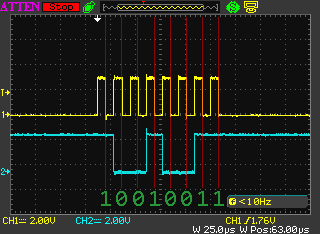
モード2(10):
ダウンタイムは論理的な単位です。
フロントエンド送信。
送信中、インパルスがSCKに送られます。 ただし、前の2つのモードとは異なり、増加していませんが、減少しています。 電圧の論理単位を超える電圧はないため、最初のインパルスは「ダウン」します。 ビットがMOSIに送信されるのは、この移行中です(結局、リーディングエッジを選択しました)。
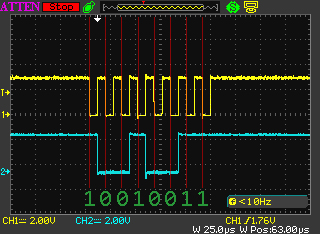
モード3(11):
ダウンタイムは論理的な単位です。
リバースギア。
送信中、SCKへのインパルスがあり、最初に低下してから増加します。 現時点では、MOSIへの移行があります。
通常、動作モードはデータシートに示されていませんが、データシートのチャートでMOSI \ MISOおよびSCKの動作を調べると、簡単に取得できます。

それでは、コントローラーで何を制御できますか?
まず、コントローラーがLCDマトリックスに表示するメモリーがあります。
第二に、座標XとYを持つメモリキャリッジがあります。
第三に、何十もの異なるビットがあります。
PDビット-0の場合、コントローラーはオン、1の場合、コントローラーはスリープモード ビットV-0の場合、データが書き込まれた後、キャリッジはXだけ1シフト、それ以外の場合はYによって9シフト(記録された列の直後) ビットH-0の場合、通常の命令セットを操作するモードがオンになり、1の場合-拡張 ビットDおよびEは、表示モードを担当します。 00-すべてのピクセルがオフです 01-すべてのピクセルがオン 10-メモリ1のピクセルの状態がオンの場合、オンの場合、0の場合、オフです(通常モード) 11-メモリ1のピクセルの状態の場合、点灯しません。0の場合、点灯します(反転) ビットTC1およびTC0は、LCD温度係数を担当します 00-係数0 01-係数1 10-係数2 11-係数3 ビットS1とS0は、内部電力乗数、つまり 理論的には何回食べ物ですか VDDの申請は内部電源とは異なります 00-2倍 01-3倍以上 10-4倍 11-5倍大きい Vop6-Vop0ビットは、初期内部電圧の値を担当します BS2-BS0ビットはシステムバイアスの原因です
次に、制御用の可能なコマンドを提供します。 それらはそれぞれ正確に8ビットで構成されています。
| (指示のどのモードでも) | ||||||||
| レジスタPD、V、Hを設定します | 0 | 0 | 1 | 0 | 0 | PD | V | H |
| (通常モードでは、一連の指示) | ||||||||
| レジスタD、Eを設定する | 0 | 0 | 0 | 0 | 1 | D | 0 | E |
キャリッジのX座標を設定します(  ) ) | 1 | X 6 | X 5 | X 4 | X 3 | X 2 | X 1 | X 0 |
キャリッジのY座標を設定します(  ) ) | 0 | 1 | 0 | 0 | Y 3 | Y 2 | Y 1 | Y 0 |
| (拡張命令セット内) | ||||||||
| TCレジスタを設定する | 0 | 0 | 0 | 0 | 0 | 1 | TC 1 | TC 0 |
| レジスタSを設定する | 0 | 0 | 0 | 0 | 1 | 0 | S 1 | S 0 |
| BSレジスタを設定する | 0 | 0 | 0 | 1 | 0 | BS 2 | BS 1 | BS 0 |
レジスタVの設定(  ) ) | 1 V op 5 | V op 6 | V op 5 | V op 4 | V op 3 | V op 2 | V op 1 | V op 0 |
LCDを正しく初期化するには、VDDに電圧を印加し、RESをオフにして、100 µs待ってからRESに再度印加する必要があります。 RESの電源がオフになると、コントローラーはスリープモードになり、RAMのクリアは保証されません。多くのレジスタはデフォルト値を取得します。 コントローラのデータシートの 14ページを参照してください。
その後、SSをオフにし(つまり、動作するデバイスを「選択」)、DCをオフにし(つまり、コマンドの送信を開始)、SPIを使用していくつかの初期化コマンドを送信する必要があります。
- 電源を入れ、同時にV = 0とH = 1を設定します
- 選択温度係数TC = 11
- 最大内部電源V op = 1111111を設定します
- 内部力率S = 01をオンにします
- システムオフセットを設定しますBS = 011
- 通常の命令セットモードを有効にするH = 0、V = 0、PD = 0
- 通常の表示モードを選択D = 1、E = 0
その後、ディスプレイが点灯し、非リセットRAMから取得したランダムなピクセルが表示されます。
残念ながら、コントローラーにはMOSIがない(つまり、フィードバックがない)ため、ディスプレイに何も表示されない場合は、少なくともSPIが機能することを確認するために、上記のコマンドの後、LCDの7番目のレッグの電圧を測定する必要があります。
実験的な(そして長い)方法で、次のことが判明しました:ディスプレイに何も表示されないが、7番目のレッグに電圧がある場合、これはSPIが機能しており、ディスプレイに十分な内部電圧がなく、V opおよびSレジスタ(最大に設定)を使用して増加する必要があることを意味しますたとえば)。 私たちの場合、ディスプレイは〜6Vで点灯します。

私たちは理論を研究し、実装に移りました。 SPIでの作業を実装するには、2つの方法があります。プロセッサのレッグを制御することですべてのハンドルを実行する(ソフトウェアspi)、またはSTM32にある「ハードウェア」実装を使用する(ハードウェアspi)。 たとえば、プロセッサの電源を使用してインターフェイスを実装する理由がないので、ハードウェアSPIを使用します。
CooCox IDEでコードを記述してデバッグします。
- CoIDEを起動して、新しいプロジェクトを作成します。

- 必要なモジュールを選択します:GPIO(レッグの制御用)、SPI(SPIの制御用)、RCC

- 将来のプログラムのために小さなフレームワークを作成します
#include "stm32f10x_gpio.h" #include "stm32f10x_rcc.h" #include "stm32f10x_spi.h" void SPIInit(void) { } void GPIOInit(void) { } void LCDInit(void) { } int main() { SystemInit(); GPIOInit(); SPIInit(); LCDInit(); return 0; }
- GPIOに入力することから始めましょう。 これを行うには、STM32のデータシートを使用して、「鉄」SPIの足がどこにあるかを調べる必要があります。 モデルはPA5(SCK)、PA6(MISO)、PA7(MOSI)です。 これらのレッグは通常のレッグまたはSPIレッグのいずれかであるため、意図する目的を明確に示して使用する必要があります。
- 残りの脚を考慮してください:
Vdd 電源を接続するための足、STM32の任意の脚に接続します(この場合、LPH7999-4では、接続制限は最大6.5Vで、STM32は各脚に3.3Vを供給します) Vout x mFのコンデンサを介して画面のグランドに接続された内部電源出力。 GND グラウンド、VOUTを参照 RES コントローラーのリセットを制御するためのフット、STM32の任意のフットに接続 DC コントローラへのデータ転送モードを担当するレッグは、STM32上の任意のレッグに接続されます。 脚に電圧がない場合、LCDコントローラーは受信したデータをコマンドとして解釈し、ある場合、キャリッジの位置に対してDDRAMの列に書き込まれる8ピクセルのセットとして解釈します。 SS 上記を参照、STM32の任意のレッグに接続
- SCK、MOSIをPA5およびPA7にはんだ付けし、DC、VDD、RESおよびSSを任意の脚にはんだ付けします。 それぞれPB0、PB1、PB2、PB3があります。
- コードを書きます:
#define SCK_Pin GPIO_Pin_5 #define SCK_Pin_Port GPIOA #define MOSI_Pin GPIO_Pin_7 #define MOSI_Pin_Port GPIOA #define DC_Pin GPIO_Pin_0 #define DC_Pin_Port GPIOB #define VDD_Pin GPIO_Pin_1 #define VDD_Pin_Port GPIOB #define RST_Pin GPIO_Pin_2 #define RST_Pin_Port GPIOB #define SS_Pin GPIO_Pin_3 #define SS_Pin_Port GPIOB void GPIOInit(void) { // (=) A, B SPI1 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB | RCC_APB2Periph_SPI1, ENABLE); GPIO_InitTypeDef PORT; // PORT.GPIO_Pin = SCK_Pin | MOSI_Pin; // ( 4 ) PORT.GPIO_Speed = GPIO_Speed_2MHz; // (!) . - " " PORT.GPIO_Mode = GPIO_Mode_AF_PP; // GPIO_Init(GPIOA, &PORT); // PORT.GPIO_Pin = DC_Pin | VDD_Pin | RST_Pin | SS_Pin; // ( - ) PORT.GPIO_Speed = GPIO_Speed_2MHz; // - , PORT.GPIO_Mode = GPIO_Mode_Out_PP; // B GPIO_Init(GPIOB, &PORT); }
コードを読みやすくするための補助プロシージャを作成します。
void PowerOn() { VDD_Pin_Port->ODR |= VDD_Pin; } void PowerOff() { VDD_Pin_Port->ODR &= ~VDD_Pin; } void ResetOn() { RST_Pin_Port->ODR |= RST_Pin; } void ResetOff() { RST_Pin_Port->ODR &= ~RST_Pin; } void DCOn() { DC_Pin_Port->ODR |= DC_Pin; } void DCOff() { DC_Pin_Port->ODR &= ~DC_Pin; } void SSOff() { SS_Pin_Port->ODR &= ~SS_Pin; } void SSOn() { SS_Pin_Port->ODR |= SS_Pin; }
- 次にSPIを構成します。
void SPIInit(void) { SPI_InitTypeDef SPIConf; // , SPIConf.SPI_Direction = SPI_Direction_1Line_Tx; // , - Master SPIConf.SPI_Mode = SPI_Mode_Master; // 8 (=1 ) SPIConf.SPI_DataSize = SPI_DataSize_8b; // 00 SPIConf.SPI_CPOL = SPI_CPOL_Low; SPIConf.SPI_CPHA = SPI_CPHA_1Edge; SPIConf.SPI_NSS = SPI_NSS_Soft; // ( , ) SPIConf.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_2; // (.. ) SPIConf.SPI_FirstBit = SPI_FirstBit_MSB; // SPI SPI_Init(SPI1, &SPIConf); // SPI1 SPI_Cmd(SPI1, ENABLE); // SS = 1 SPI_NSSInternalSoftwareConfig(SPI1, SPI_NSSInternalSoft_Set); }
- SPIでデータを送信する機能を書きましょう
void SPISend(uint16_t data) { SPI_I2S_SendData(SPI1, data); // while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) == RESET); // , }
- 理論に従って初期化を書きましょう
void LCDInit(void) { SSOff(); DCOff(); PowerOn(); ResetOff(); ResetOn(); SPISend(0x21); // , , . . SPISend(0b1001); // SPISend(0xFF); // SPISend(0x06); // SPISend(0x13); // bias ( ) SPISend(0x20); // ..., SPISend(0b1100); // }
- プロジェクト-ビルド(またはF7)
- フラッシュ-プログラムのダウンロード
- 私たちは見て喜んでいます:3
ここでは、CooCoxの完成したプロジェクトをダウンロードできます。

もちろん、2013年には、ARMプロセッサで接続されたディスプレイを驚かすことは困難です。 私たちにとって、初心者の開発者にとって、これは私たちのユニークな「電子ブレスレット」プロジェクトの実装に向けた最初のステップです。
市場への参入を夢見ているのではなく、経験を積み、機能的でスタイリッシュで長持ちするガジェットを自分で作り、同時にここで成功と失敗を伝えたいだけです。
これで、デバイスは画面上に画像を描画できるようになりました。以前は、Python 2.7とPILを必要とするこの Python スクリプトを使用して、8ビットの「列」の配列に変換されていました。
使用法: photo.py file24bit.bmp> bytes.c
いくつかの図はhttp://easystm32.ru/interfaces/43-spi-interface-part-1から取られました