
パート 1-私が思いついて、クアドロコプターを構築したところ。
クアドロコプターの話を続けます。 最初の記事の公開以来、私は多くの時間を飛行し、ヘリコプターに多くの変更を加えました。 すべての小さな詳細について話すのは長く、ほとんど関心がありません。 したがって、私は主な変更、すなわち次のことに限定します。
- 新しいフライトコントローラー-シンプルなCrius MultiWii SEショールは、新しいArduPilot Mega 2.5に取って代わり、飛行性能を劇的に改善し、ヘリコプターにいくつかの高度な機能を追加しました。
- カメラのアクティブジンバル-GoProは現在、厳密に固定されていませんが、ヘリコプターの任意の位置で水平位置に保持する安定化ジンバルに取り付けられています。
- 新しいエンジン-ヘリコプターの重量の増加(および古いエンジンの突然の死)により、新しく、より強力で非常に優れたエンジンが設置されました。
- 個別のFPVカメラ-GoProは記録のみに使用されるようになりました;ビデオグラスを介した飛行には、個別の固定マウントカメラが使用されます。
しかし、まず最初に...
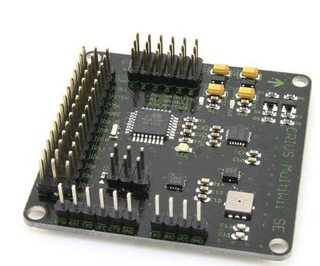
ArduPilot Mega 2.5
そのため、最初の更新は新しいAPM 2.5フライトコントローラーです。 以前に使用したCrius MultiWii SEとどのように違いますか?
ArduPilot Mega 2.5
 | Crius MultiWii SE
 | |
|---|---|---|
| CPU | Atmel ATmega2560 | Atmel ATmega328p |
| ジャイロスコープ、加速度計: | Invensense MPU-6000 | Invensense ITG-3205
ボッシュBMA180 |
| バロメーター: | 測定スペシャリティMS5611-01BA03 | ボッシュBMP-085 |
| 磁力計: | ハネウェルHMC5883L-TR | |
| GPS: | シリアルポート経由の直接センサー接続 | 追加のコントローラーとI 2 Cバスを介したセンサー接続 |
| PC接続: | USB
無線モデムを介したテレメトリー(433 MHz) | 別のFTDIアダプター経由のUSB
Bluetooth経由のテレメトリ |
| 内蔵メモリ: | GPSログおよびその他のテレメトリを記録するための4 MB | - |
- 0.5メートルの精度で位置と高さを保持(GPSデータは慣性航法と共に使用されます)
- 出発地点と着陸地点への自動復帰(D / Cからの信号、または信号が失われたとき、またはバッテリーが低下したとき)
- 最大飛行高度と飛行が許可される領域を制限する
- 設定ポイントでの自動ナビゲーション-フライトプランはPO Mission Plannerを使用してコンパイルされ、ヘリコプターは自律ナビゲーションに送信されます。 433 MHzの無線テレメトリーによるPCからのリモート制御が可能です。
より正確なセンサーと高度な安定化アルゴリズムにより、ヘリコプターはMultiWiiよりもはるかに安定しているように感じます。 そして、ベース機能への自律的な復帰により、FPVを飛行する際に安心感が得られます。ビデオ損失は致命的ではなく、RTH(Return To Home)をオンにして、ヘリコプターが「ホーム」に到着して着陸するか、安定したビデオ通信のゾーンに戻るまで待機します。 D / R信号が失われると、RTHは自動的にオンになります。
アクティブジンバルおよびFPVカメラ
良好なビデオ録画のためには、堅固に取り付けられたカメラは適切ではありません-ヘリコプターの位置に関係なく、カメラを水平位置に保つために安定化が必要です。 このような安定化には、2種類のサスペンションがあります。
- サーボサスペンション:昨年の一般的なソリューション。 彼はロールとピッチのデータを持っているので、モデルエリアから通常のサーボを使用し、それらはフライトコントローラによって制御されます。
利点:シンプルで安価。
欠点:安定性が悪い。 サーボの分解能と反応速度は、明らかな遅延なしにヘリコプターの動きを補償するには不十分です。 - ブラシレスモーターのサスペンション:昨年中に配布されました。 ブラシレスモーターが使用され、巻き戻されて高い保持トルクを生成し、カメラ位置センサーを備えた別のコントローラーによって制御されます。
利点:十分に強力なモーターと完全に調整されたコントローラーを備えたほぼ完全な安定化により、カメラには目に見える動きがまったくありません。
欠点:高価で、構成が難しく、重い。
私にとって、ブラシレスサスペンションの利点はすべての欠点を上回り、自分で作ることに決めました。結局、ヘリコプターを停止するのではなく、最初から組み立てました。 同時に、追加のカメラ用のマウントをサスペンションに統合することにしました:FPVを飛行することは、固く固定されたカメラを通してさらに快適です(そうでなければ、ヘリコプターの位置は見えません)。さらに、特殊なFPVカメラには、GoProよりも多くの利点があります。複雑な照明(たとえば、太陽に向かって飛んでいるとき)。 次のコンポーネントが購入されました。
- コントローラー:Martinez v3.1(€50)
- モーター:RCTimer HP2212 70T(2x $ 17.99)
- FPVカメラ:Sony Super HAD 600TVL(40ユーロ)
Martinezコントローラーはオープンソースソフトウェア( BruGi )上で動作し、私の地元のFPVフォーラムで数人によって開発されています。 別の方法として、有名なコントローラーAlexey Moskalenko ( Alexmos SimpleBGC )があります。 ただし、2倍以上のコストがかかり、安定化の品質に関しては、BruGiの最新バージョンはすでに完全に匹敵するレベルにあります。
私は自分でサスペンションメカニクスを開発し、ヘリコプター自体のフレームと同様に、グラスファイバーのフライス盤で切断するように友人に頼みました。 友人が私の詳細を準備している間に、フォーラムの別の同僚がボランティアで3Dモデルを作成し、レンダリングしました。

組み立てプロセスと、コントローラーのPIDパラメーターを何時間も調整した後の最初の飛行:
残りすべて
サスペンションを取り付けた後のヘリコプターの重量増加(1950年前、2140g後)、および古いエンジンの1台の突然の死(飛行中...傷つかない)、新しいエンジンが購入され、インストールされました。

変更前: Turnigy NTM 28-30 750kv Graupner E-Prop 11x5および4Sバッテリー付きロッド:1kg

後: Tiger Motor MT2216-11 900kv 。 Graupner E-Prop 11x5および4Sバッテリー付きロッド:1.2kg
Tiger Motorモーターは、HobbykingのNTMよりもかなり高価ですが(18ユーロに対して36.50ユーロ)、品質は大幅に向上しています。 それらに使用されている日本のベアリングは、NTMモーターの安価な中国語よりもはるかに長寿命です。 私が購入した4つのエンジンはすべて完全にバランスが取れており、全速度範囲で振動なしで作動しました。4つのNTMのうち3つはバランスが取れていましたが、
また、カメラの重いジンバルがドローンの重心を前方に移動させたため、バッテリーをさらに後方に移動する必要がありました。 これは飛行性能に悪影響を及ぼしました。ヘリコプターはロール軸に沿ったピッチ軸に沿ったものよりも著しく不活性になりました。 通常、フライトコントローラーのPIDパラメーターは、ほとんどのヘリコプターが対称であるため、両方の軸に対して等しく選択されます。 振動やその他の望ましくない影響なしにかなり安定した飛行を達成するために、両方の軸に対して個別に新しいパラメーターを手動で選択する必要がありました。
すべての更新を含むヘリコプターの一般的なビュー:

継続するには...