尊敬されている「habrasociety」記事へのアピールは、私にとってまだ完全には理解されていない問題を理解しようとする試みであるため、「あなたは愚か者であり、それだけです」ではなく、建設的な批判と理解可能なフィードバックを待っています。今すぐトピックに取り掛かりましょう。
名前が示すように、慣性航法システムに焦点を当てます。 私はロボット工学科(2005-2011)で勉強したため、移動ロボットのナビゲーションの問題は深刻でした。 私にとっては、どのようにして座標を見つけ、同時に特定の灯台、衛星、そこにあるあらゆる種類のソナーから独立することができるかは常に興味深いものでした。 答えは2006年にnokia n95電話のクールな「ギズモ」について聞いたときに既に現れました。 当時、「学童」のための遠足が突然読まれ、これらの携帯電話は非常に人気がありました。 一般に、加速度計などのデバイスについて学びました。 加速度を測定するように。 しかし、物理学と代数から、二重積分を取ることで変位を見つけることができることを知っていました。 私はどれほど面白くなり、これをやりたいと思いました。 それからもちろん、加速度計でnokia n95を感じる方法がなかったので、私はこのアイデアを投げ入れました。そして、人工知能法、画像認識タスクなどに興味を持ちました。 しかし、卒業の1年前、カルマンフィルターに関する記事に出会い、再び急増しました。
ANNまたはSOPP?
美しい文学を書きたかったのですが、力が足りないと感じました。 私は慣性航法システム(ANN)、特にBINS(ストラップダウン)については書きません。インターネット上には多くの記事があり、ハブには読みやすいオプションがあります。 Memsセンサーが安くなっているため、SINSの人気が高まっていることに注意してください。 ヘリコプターへの関心が急速に高まったため、文学を読み始め、「空間位置決定システム」(SOPP)という私の翻訳であるAHRS(態度とヘディング参照システム)という用語に出会いました。 西洋文学で非常に積極的に使用されています。 そしてすぐに、それがANNとどう違うのかという疑問が生じました。 次の図に私の仮定を示しました。
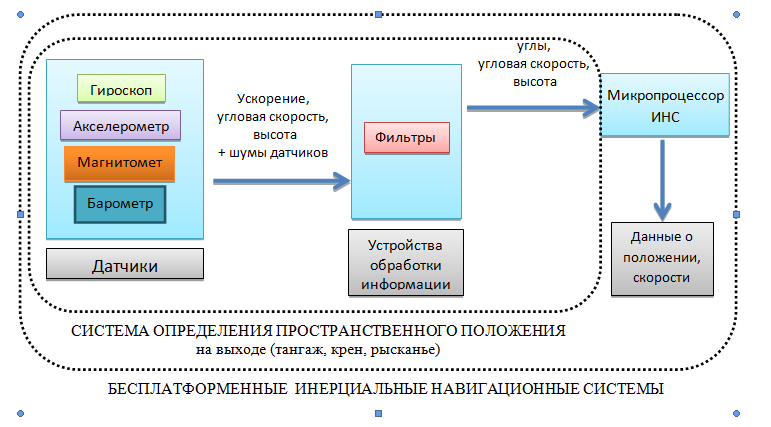
つまり、SINSはより「高度なオプション」であり、その出力には位置に関する座標があります。 これはそうですか、コメントであなたの意見をお願いします。
センサー、センサー要素。
メインセンサーSINSは、加速度計とジャイロスコープと見なすことができます。 図は、ジャイロスコープの主なタイプを示しています。

V.Yaの本から抜粋した図。 ラスポポワ。 慣性航法の敏感な要素(SE)を理解したい場合、これは最高の本の1つです。 加速度計については、ここでは、タイプごとに、マクロメカニカル、マイクロメカニカル、積分の3つのグループに分けられます。 加速度計SEは、サスペンションの慣性質量を表します。 マクロメカニカルグループには、サスペンションがスプリング、ストリングまたはコア、ボールベアリング、電磁ユニットの形で実装される加速度計が含まれます。これらは、サスペンションユニットの静水圧式アンロードを備えたいわゆるフロート加速度計の測定要素としても機能します。 サイズのマクロメカニカル加速度計の対極はマイクロメカニカルであり、一体型(ハイブリッド)加速度計はマクロとMEMS技術を組み合わせた製品です。
 仕事の原理を表す図面。
仕事の原理を表す図面。
作業アルゴリズム
ストラップダウンANNが検討されています。 作業と農民の用語では、このように聞こえます。システムには、その状態を記憶し、オブジェクトの角運動の影響からSEを保護する物理的な実際のプラットフォームがありません。 つまり、SINSの場合、ジャイロスコープと加速度計はオブジェクトの本体に配置され、オンボードコンピューティングデバイスはジャイロ安定化プラットフォームの機能を実行します。 これは仕事のプラスと最大のマイナスです。 マイクロコンピューターは常に三角関数を常に含むメモリ遷移行列に保持する必要があるためです。 出力でのナビゲーションシステムのタスクは、コーナー、よく知られている名前であるピッチ、ロール、ヨーを与えることです。 これらの角度を計算する3つの方法が一般的です。 1つ目は式とオイラー・クリロフ角の実装を理解する上で最も単純で、2つ目の方法はブルジョアでよく使われ、コサイン(DCM)を誘導し、3つ目は「想像上の」四元数のわずかな色合いを持ち、ロドリゲハミルトンとも呼ばれます メタ数学と理論では、3つの方法すべての出力は同じでなければなりません。 オイラー–クリロフ角の運動方程式は低次(3番目)であり、理解可能な構造を持っていますが、所望の角度の三角関数を含み、90度のピッチ角での縮退を可能にします。 これはすべて、SINSでの不適格性を決定します。 ガイドコサインの行列を使用して記述されたSINS方程式は線形であり、ヨー、ピッチ、およびロール角に対して定義されますが、方程式は非常に高く、9次です。 さらに、方程式は6つの結合方程式で補足する必要があります。
四元数は、空間内のオブジェクトの位置と回転の便利な数学的な指定を提供します。 オイラー角と比較して、クォータニオンは、他の軸に沿った完全な回転に関係なく、回転の結合を容易にし、軸を中心に回転できないという問題を回避します(図を参照)。 行列と比較して、計算的に安定しており、より効率的です。
システム全体の動作の一般化されたブロック図を示します。
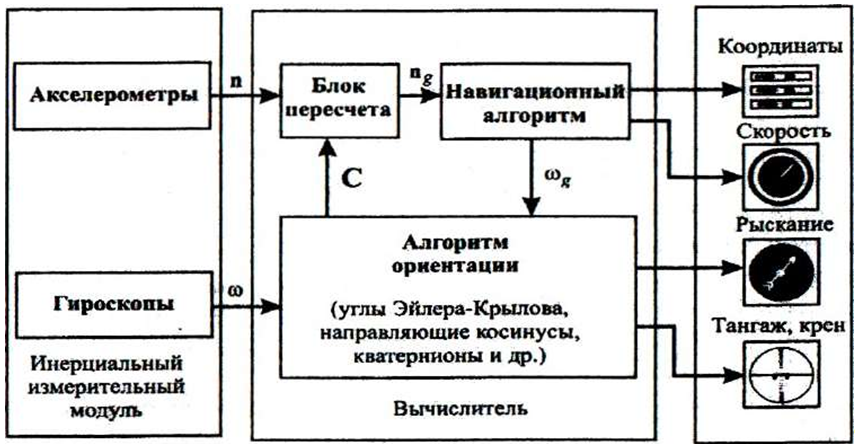 。 図面は、ビンソの研究者のマストヴァでもあるマトヴェーエフの本から引用されています。
。 図面は、ビンソの研究者のマストヴァでもあるマトヴェーエフの本から引用されています。
すべての問題双眼鏡
前述のように、システムには三角関数を考慮した行列が必要です。 さらに、値を計算する各ステップでエラーが発生します。つまり、累積されます。 2番目のMEMSセンサーには多くの利点がありますが、大きなマイナスがあり、「ノイズを発生させます」。 つまり、ナビゲーションシステムを設計する際には、エラーの蓄積とセンサーノイズを考慮する必要があります。 ここに、すべての問題を説明したかどうかの質問があります。 エラーの蓄積について詳しく説明します。 優秀な高等数学を知っている人のために、彼らはスキップすることができます。 ここで、考えは声を出して、ここでエラーが蓄積されますか?
サインを取ります。 私たちは学校で彼を考慮しました。 どんなに。 3つの角度に対するその値を覚えており、それだけです。 そして、光学のレッスンで、小さな角度でのサインは角度に等しいと言われました。 つまり、3つの「ゲスト非生体角」の3つの値と、最大5度の角度の1つのサインを知っていました。 しかし、人生では、30、45、60度に等しい角度に囲まれているだけではありません。 そして、34、79、さらには分と秒があります。 それから、ブラディスのテーブルが私たちの助けになりました。 つまり、一部の計算は行われませんでした。値または角度をテーブルで調べただけです。 次に、それらの最初の年の2学期を完了した人。 ユニ、テイラー級数と数値的方法について学びました。 一般的に、これがすべてである理由です。マイクロコントローラーは人間ではなく、「再帰的に」「反復的に」問題に近づきます。テイラーの数は、誰かに、しかししばらくの間、数えます。 これらの「一部」は非常に重要です。 これらの不確実性は、このまさに蓄積の要素に貢献します。 さらに、浮動小数点数の計算におけるコンピューター自体の制限。 ここでは数値的方法における積分と誤差蓄積の問題についてよく説明します 。 三角法の計算精度を高めるためのオプションを引き続き探しますが、ここでは、おそらくすべてがプログラミング言語に依存しています。
2番目の問題は、センサーからのノイズの多い信号です。 慣性航法は、ノイズを除去する2つの方法を使用します。文字通りの意味での最初のフィルタリングと、水を通過させ、他のすべてを通過させないアナログ「marlichka」です。 2つ目の方法である「冗長性の原則」は、1つの状態に関する情報が複数の独立したソースから得られる場合です。 このテーマに関する良い記事はこちら 。
結論の代わりに
私の最初の記事の一部は、原始言語で書くことができます。できるだけ明確にしたいだけです。 この記事は入門書なので、コミュニティが興味を持っている具体的な問題を把握したいと思います。 これで、MaltabにMEMSセンサーのモデリングに関する既成の記事があります。最初のコメントとコメントを聞きたいので、次の記事に変更を加えることができます。 matlabには、ナビゲーションシステム全体(DCM上)の経験と既製のモデルがあります。 そして、すべてが実装されているcortex m3 / m4に関する一連の記事のプロジェクト継続があります。