
ここにいる人の多くはゲームSpace Rangersを知っていると思います。 また、このゲームがテキストクエストを実際に復活させたといっても、このゲームの魅力は大きいと言っても、私があまり間違っているとは思いません。 シタデルやスキーリゾートなどのこれらのクエストの一部は、独立したゲームと見なされる可能性があります。
テキストクエストに対する私の態度は2つあります。 一方で、それらは非常に興味深く、想像を絶する雰囲気です。 その一方で、それらのいくつかは簡単に解決できません。 「15」クエストはすぐに私を困惑させました。 一般的に、私はあらゆる種類のパズルを解くのがあまり得意ではないので、私は解決策を見つけるプログラムを書くことにしました。
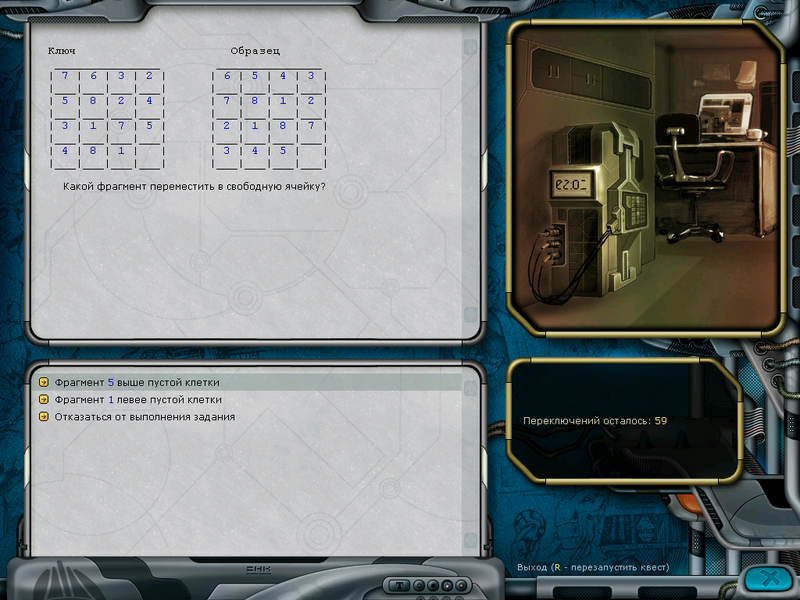
そのため、割り当ての条件に従って、よく知られているゲームを痛烈に連想させる、パズルを解く必要がある金庫を開く必要があります15 。
類似点にもかかわらず、言及すべき重要な違いが2つあります。
- パズルは限られた数の動きで解決する必要があります
- ご覧のとおり、チップ上の数字が繰り返されています
以下に示すように、移動数の制限は、問題の解決に役立ちます(最短の解決策を検索する必要はありません。59の移動を超えない解決策を見つければ十分です)。 2番目の段落では、すべてがそれほど単純ではありません。 一見すると、ソリューションは単純化されるはずですが、そうではありません。
ゲーム「15」で可能なポジションの半分には解決策がないことが広く知られています。 さらに、一部のポジションでは、解決に必要な最小移動数が、ジョブの条件で指定された移動数を超える場合があります。 したがって、チップのペアの1つを間違った場所に移動し始めると、パズルを解くことができなくなる可能性が高くなります。 ペアのピースと混同しないように、ユニークな方法で番号を付け直して、パズルを古典的なゲーム「15」に減らしてください。
割り当ての条件によると、7ペアのマッチングチップがあるため、実際には2 ^(7-1)= 64パズルのいずれかを解決する必要がありますが、その中には解決策がないものもあります。 これは間違いなくタスクを複雑にします。
問題の解決に進む前に、16のセルの状態を保存する必要があることに注意してください。各セルは16の状態になります(空のセルはゼロでエンコードされます)。 これにより、8バイト整数を使用して位置を保存できます。
古典的なパズル「15」(非反復チップ)を解くことから始めましょう。
solver.h
#ifndef SOLVER_H_ #define SOLVER_H_ #include <stdio.h> #include "common.h" #include "PerfCnt.h" class Solver { public: Solver(Long startPos, Long endPos, int stepCnt): startPos(startPos), endPos(endPos), stepCnt(stepCnt), posCnt(0), perfCnt() {} bool solve(); private: Long startPos; Long endPos; int stepCnt; Long posCnt; PerfCnt perfCnt; static Long pos[MAX_DEEP]; static Byte step[MAX_DEEP]; void dumpSolve(int deep); void dumpPos(int delta); void dumpTotal(); bool checkPos(Long p, int deep); bool solve(int deep, int delta, int startDelta, int X, int Y); Long getStep(Long p, int x, int y, int dx, int dy, int& dd); }; #endif
solver.cpp
#include "solver.h" Long Solver::pos[MAX_DEEP]; Byte Solver::step[MAX_DEEP]; void Solver::dumpPos(int delta) { printf("Distance: %d\n\n", delta); Long mask = 0xFFFF; for (int shift = 48; shift >= 0; shift -= 16) { int x = (int)((startPos & (mask << shift)) >> shift); int y = (int)((endPos & (mask << shift)) >> shift); printf("%04X %04X\n", x, y); } } void Solver::dumpSolve(int deep) { printf("\n"); for (int i = 0; i < deep; i++) { printf("%d", step[i]); } printf("\n"); } void Solver::dumpTotal() { printf("\nCount: %6I64d\n", posCnt); printf("Time: %7.3f\n\n", perfCnt.elapsed()); } bool Solver::checkPos(Long p, int deep) { int j = MAX_LOOP; for (int i = deep - 1; i >=0; i--) { if (pos[i] == p) return true; if (--j <= 0) break; } return false; } bool Solver::solve() { if (stepCnt >= MAX_DEEP) return false; pos[0] = startPos; int delta = getDelta(startPos, endPos); int X = getX(startPos); int Y = getY(startPos); dumpPos(delta); bool r = solve(0, delta, delta, X, Y); dumpTotal(); return r; } Long Solver::getStep(Long p, int x, int y, int dx, int dy, int& dd) { Long digit = getDigit(p, x + dx, y + dy); if (digit == 0) return p; if (dx != 0) { int delta = getDeltaX(startPos, endPos, digit); if (delta * dx <= 0) { dd++; } else { dd--; } } if (dy != 0) { int delta = getDeltaY(startPos, endPos, digit); if (delta * dy <= 0) { dd++; } else { dd--; } } xorDigit(p, x, y, digit); xorDigit(p, x + dx, y + dy, digit); return p; } bool Solver::solve(int deep, int delta, int startDelta, int X, int Y) { if (pos[deep] == endPos) { dumpSolve(deep); return true; } if (delta > stepCnt - deep) { return false; } if (delta - startDelta > MAX_DELTA_DIFF) { return false; } for (int i = 0; i < 4; i++) { int dd = 0; int dx = 0; int dy = 0; switch (i) { case 0: dy--; break; case 1: dx++; break; case 2: dy++; break; case 3: dx--; break; } if ((X + dx < 1)||(Y + dy < 1)||(X + dx > 4)||(Y + dy > 4)) continue; if (deep + 1 >= MAX_DEEP) return false; pos[deep + 1] = getStep(pos[deep], X, Y, dx, dy, dd); if (checkPos(pos[deep + 1], deep)) continue; step[deep] = i; posCnt++; if (solve(deep + 1, delta + dd, startDelta, X + dx, Y + dy)) return true; } return false; }
これは通常の戻り検索です。 考えられるすべての動きを繰り返し、位置を変更し、新しい位置に対して同じ関数を再帰的に呼び出します。 行われた移動は、空のセルの移動方向を示す0から3までの数字でエンコードされます(0-上、1-右、2-下、3-左)。
switch (i) { case 0: dy--; break; case 1: dx++; break; case 2: dy++; break; case 3: dx--; break; }
ソリューションを見つけるのに便利なように、完了した移動のシーケンスをスタックに保存します(移動の数はタスクの条件によって制限されるため、通常の静的配列を使用できます)。
このアプローチの主な難点は、検索深度に応じて、表示される位置の数が雪崩のように増加することです。 明らかに正しい決定につながらない動きを断つことが必要です。 以下の考慮事項が役立ちます。
- 各位置について、2〜4の可能な移動が可能です(空のセルの位置に応じて)が、以前に考慮した位置を繰り返すことは意味がありません(移動のような位置は静的スタックに格納できます)。
- 各位置について、目的の位置までのマンハッタン距離を計算できます(他のチップが干渉しない限り、すべてのチップを元の位置に戻すために必要な移動の総数)。 さらに本文では、単に距離と呼びます。 計算された距離が残りの動きの数を超える場合、位置には解がなく、さらなる検索を停止できます(ここでは、パズルがN回以内に解決されるという知識が役立ちます)。
距離の計算は比較的リソースを消費する操作であるため、一度(最初の位置に対して)計算してから、チップの移動方向に応じてこの値をインクリメントまたはデクリメントし、次の移動を行います。
補助機能を実装します。
common.h
#ifndef COMMON_H_ #define COMMON_H_ typedef unsigned __int64 Long; typedef unsigned __int16 Short; typedef unsigned char Byte; const int MAX_POSITION = 4; const int MAX_DIGIT = 15; const int MAX_DEEP = 100; const int MAX_LOOP = 10; const int MAX_TASKS = 100; const int MAX_DELTA_DIFF = 5; int getPosition(Long part); int getX(Long state); int getY(Long state); int getX(Long state, Long d); int getY(Long state, Long d); int getDeltaX(Long a, Long b, Long d); int getDeltaY(Long a, Long b, Long d); int getDelta(Long a, Long b); Long getDigit(Long p, int x, int y); void xorDigit(Long& p, int x, int y, Long d); void setDigit(Long& p, Long m, Long d); #endif
common.cpp
#include "common.h" #include <math.h> Long digit[MAX_DIGIT + 1] = { 0x0000000000000000L, 0x1111111111111111L, 0x2222222222222222L, 0x3333333333333333L, 0x4444444444444444L, 0x5555555555555555L, 0x6666666666666666L, 0x7777777777777777L, 0x8888888888888888L, 0x9999999999999999L, 0xAAAAAAAAAAAAAAAAL, 0xBBBBBBBBBBBBBBBBL, 0xCCCCCCCCCCCCCCCCL, 0xDDDDDDDDDDDDDDDDL, 0xEEEEEEEEEEEEEEEEL, 0xFFFFFFFFFFFFFFFFL }; int getPosition(Long part) { for (int i = 4; i > 0; i--) { if ((part & 0xF) == 0) return i; part >>= 4; } return 0; } int getX(Long state) { for (int i = 4; i >= 1; i--) { int r = getPosition(state & 0xFFFF); if (r != 0) return r; state >>= 16; } return 0; } int getY(Long state) { for (int i = 4; i >= 1; i--) { int r = getPosition(state & 0xFFFF); if (r != 0) return i; state >>= 16; } return 0; } int getX(Long state, Long d) { state ^= digit[d]; return getX(state); } int getY(Long state, Long d) { state ^= digit[d]; return getY(state); } int getDeltaX(Long a, Long b, Long d) { a ^= digit[d]; b ^= digit[d]; return getX(a) - getX(b); } int getDeltaY(Long a, Long b, Long d) { a ^= digit[d]; b ^= digit[d]; return getY(a) - getY(b); } int getDelta(Long a, Long b) { int r = 0; for (Long d = 1; d <= MAX_DIGIT; d++) { r += abs(getDeltaX(a, b, d)); r += abs(getDeltaY(a, b, d)); } return r; } Long getDigit(Long p, int x, int y) { for (; y <= 4; y++) { if (y == 4) { p &= 0xFFFF; for (; x <= 4; x++) { if (x == 4) { return p & 0xF; } p >>= 4; } break; } p >>= 16; } return -1; } void xorDigit(Long& p, int x, int y, Long d) { for (; x < 4; x++) { d <<= 4; } for (; y < 4; y++) { d <<= 16; } p ^= d; } void setDigit(Long& p, Long m, Long d) { p ^= p & m; m &= digit[d]; p ^= m; }
パフォーマンスを最適化するために、ビット操作の使用を最大限にしようとします。
すべてが機能することを確認するには、小さなパズルを解くことができます。
1 2 3 4 5 1 3 4 5 6 7 8 9 2 B 7 9 ABCD 6 A 8 DEFEFC
私はこの例を用意したので、11の動きで解決できます。
実際、この制限により、プログラムは1000分の1秒で答えを表示します。
Distance: 11 1234 5134 5678 92B7 9ABC D6A8 DEF0 0EFC 00323003222 Count: 18 Time: 0.001
18個のアイテムが考慮されていることがわかります。 移動数の制限と最終位置までの距離の違いに応じて、複雑さの増加を評価するために、表示される位置の数を固定して、移動数の制限を増やします。
最終的なグラフは次のとおりです。

グラフの鋸歯状の動きは、プログラムが新しい(より長い)解を見つける一方で、移動数の制限を増やすという事実によって説明されます。 予想どおり、表示される位置の数は非常に速く増加します。
現在、チップのペアの番号の付け直しを実装する必要があります。 これで、再帰も役立ちます:
initializer.h
#ifndef INITIALIZER_H_ #define INITIALIZER_H_ #include "common.h" #include "solver.h" struct Task { Long startPos; Long endPos; int delta; bool isProcessed; }; class Initializer { public: Initializer(Long startPos, Long endPos, int stepCnt): startPos(startPos), endPos(endPos), stepCnt(stepCnt), taskCnt(0) {} bool solve(); private: Long startPos; Long endPos; int stepCnt; int taskCnt; static Task tasks[MAX_TASKS]; static int digits[MAX_DIGIT + 1]; bool checkInit(Long s, Long e); bool addPos(Long s, Long e); bool init(Long s, Long e); Long getFreeDigit(); bool checkPos(Long s, Long e); void normalize(Long& p); void dumpPos(Long s, Long e, int delta); }; #endif
initializer.cpp
#include "initializer.h" Task Initializer::tasks[MAX_TASKS]; int Initializer::digits[MAX_DIGIT + 1]; bool Initializer::solve() { if (!init(startPos, endPos)) return false; while (true) { int mn = stepCnt; int ix = -1; for (int i = 0; i < taskCnt; i++) { if (tasks[i].isProcessed) continue; if (stepCnt - tasks[i].delta < mn) { mn = stepCnt - tasks[i].delta; ix = i; } } if (ix < 0) break; tasks[ix].isProcessed = true; Solver solver(tasks[ix].startPos, tasks[ix].endPos, stepCnt); if (solver.solve()) return true; } return false; } bool Initializer::checkInit(Long s, Long e) { for (int i = 0; i <= MAX_DIGIT; i++) { digits[i] = 0; } for (int i = 0; i <= MAX_DIGIT; i++) { digits[s & 0xF]++; s >>= 4; } if (digits[0] != 1) return false; for (int i = 0; i <= MAX_DIGIT; i++) { digits[e & 0xF]--; e >>= 4; } for (int i = 0; i <= MAX_DIGIT; i++) { if (digits[i] != 0) return false; } return true; } void Initializer::dumpPos(Long s, Long e, int delta) { printf("0x"); Long mask = 0xFFFF; for (int shift = 48; shift >= 0; shift -= 16) { int x = (int)((s & (mask << shift)) >> shift); printf("%04X", x); } printf(" 0x"); mask = 0xFFFF; for (int shift = 48; shift >= 0; shift -= 16) { int x = (int)((e & (mask << shift)) >> shift); printf("%04X", x); } printf(" %d\n", delta); } bool Initializer::addPos(Long s, Long e) { if (!checkPos(s, e)) return true; if (taskCnt >= MAX_TASKS) return false; tasks[taskCnt].startPos = s; tasks[taskCnt].endPos = e; tasks[taskCnt].delta = getDelta(s, e); tasks[taskCnt].isProcessed = false; if (tasks[taskCnt].delta == 0) return false; if (tasks[taskCnt].delta > stepCnt) return true; taskCnt++; return true; } Long Initializer::getFreeDigit() { for (Long i = 1; i <= MAX_DIGIT; i++) { if (digits[i] == 0) return i; } return 0; } bool Initializer::init(Long s, Long e) { for (int i = 0; i <= MAX_DIGIT; i++) { digits[i] = 0; } Long x = s; for (int i = 0; i <= MAX_DIGIT; i++) { digits[x & 0xF]++; x >>= 4; } bool f = true; for (int i = 0; i <= MAX_DIGIT; i++) { if (digits[i] != 1) f = false; } if (f) { return addPos(s, e); } Long d = getFreeDigit(); if (d == 0) return false; x = s; Long ms = 0xF; for (int i = 0; i <= MAX_DIGIT; i++) { Long t = x & 0xF; if (digits[t] > 1) { setDigit(s, ms, d); Long y = e; Long me = 0xF; for (int j = 0; j <= MAX_DIGIT; j++) { if ((y & 0xF) == t) { Long k = e; setDigit(k, me, d); if (!init(s, k)) return false; } me <<= 4; y >>= 4; } break; } ms <<= 4; x >>= 4; } return true; } void Initializer::normalize(Long& p) { int x = getX(p); int y = getY(p); for (; x < 4; x++) { Long d = getDigit(p, x + 1, y); xorDigit(p, x + 1, y, d); xorDigit(p, x, y, d); } for (; y < 4; y++) { Long d = getDigit(p, x, y + 1); xorDigit(p, x, y + 1, d); xorDigit(p, x, y, d); } } bool Initializer::checkPos(Long s, Long e) { normalize(s); normalize(e); Long nums[16] = {0}; int ix = 0; for (int y = 1; y < 4; y++) { for (int x = 1; x < 4; x++) { Long d = getDigit(e, x, y); if (d != 0) { nums[d] = ++ix; } } } int cn = 0; for (int y = 1; y < 4; y++) { for (int x = 1; x < 4; x++) { Long d = getDigit(s, x, y); for (Long i = 1; i <= 15; i++) { if (nums[i] < nums[d]) { int Y = getY(s, i); if (Y < y) continue; if (Y > y) { cn++; break; } int X = getX(s, i); if (X > x) { cn++; break; } } } } } return (cn & 1) == 0; }
リストに追加する前に、ポジションに解決策があるかどうか、指定した移動数で解決できるかどうかを確認します(明らかに解決策のないポジションに対して高価な検索を実行するよりも、もう一度確認する方が良いです)。
距離の降順でソートされた、可能な位置のリストは次のとおりです。
リスト
0x763258F4E1DCBA90 0x6CBEDA1F29873450 50 0x763258F4E1DCBA90 0x6CBED81F29A73450 48 0x763258F4E1DCBA90 0x6CBEDA9F21873450 48 0x763258F4E1DCBA90 0x6CBED89F21A73450 46 0x763258F4E1DCBA90 0x6C4EDA1F29873B50 44 0x763258F4E1DCBA90 0x65BEDA12F98734C0 44 0x763258F4E1DCBA90 0x6CBE7A1F298D3450 44 0x763258F4E1DCBA90 0x6C4ED81F29A73B50 42 0x763258F4E1DCBA90 0x65BED812F9A734C0 42 0x763258F4E1DCBA90 0x6CBE781F29AD3450 42 0x763258F4E1DCBA90 0x6CB3DA1F2987E450 42 0x763258F4E1DCBA90 0x6C4EDA9F21873B50 42 0x763258F4E1DCBA90 0x65BEDA92F18734C0 42 0x763258F4E1DCBA90 0x6CBE7A9F218D3450 42 0x763258F4E1DCBA90 0x6CB3D81F29A7E450 40 0x763258F4E1DCBA90 0x6C4ED89F21A73B50 40 0x763258F4E1DCBA90 0x65BED892F1A734C0 40 0x763258F4E1DCBA90 0x6CBE789F21AD3450 40 0x763258F4E1DCBA90 0x6CB3DA9F2187E450 40 0x763258F4E1DCBA90 0x654EDA12F9873BC0 38 0x763258F4E1DCBA90 0x6C4E7A1F298D3B50 38 0x763258F4E1DCBA90 0x65BE7A12F98D34C0 38 0x763258F4E1DCBA90 0x6CB3D89F21A7E450 38 0x763258F4E1DCBA90 0x654ED812F9A73BC0 36 0x763258F4E1DCBA90 0x6C4E781F29AD3B50 36 0x763258F4E1DCBA90 0x65BE7812F9AD34C0 36 0x763258F4E1DCBA90 0x6C43DA1F2987EB50 36 0x763258F4E1DCBA90 0x65B3DA12F987E4C0 36 0x763258F4E1DCBA90 0x6CB37A1F298DE450 36 0x763258F4E1DCBA90 0x654EDA92F1873BC0 36 0x763258F4E1DCBA90 0x6C4E7A9F218D3B50 36 0x763258F4E1DCBA90 0x65BE7A92F18D34C0 36 0x763258F4E1DCBA90 0x6C43D81F29A7EB50 34 0x763258F4E1DCBA90 0x65B3D812F9A7E4C0 34 0x763258F4E1DCBA90 0x6CB3781F29ADE450 34 0x763258F4E1DCBA90 0x654ED892F1A73BC0 34 0x763258F4E1DCBA90 0x6C4E789F21AD3B50 34 0x763258F4E1DCBA90 0x65BE7892F1AD34C0 34 0x763258F4E1DCBA90 0x6C43DA9F2187EB50 34 0x763258F4E1DCBA90 0x65B3DA92F187E4C0 34 0x763258F4E1DCBA90 0x6CB37A9F218DE450 34 0x763258F4E1DCBA90 0x654E7A12F98D3BC0 32 0x763258F4E1DCBA90 0x6C43D89F21A7EB50 32 0x763258F4E1DCBA90 0x65B3D892F1A7E4C0 32 0x763258F4E1DCBA90 0x6CB3789F21ADE450 32 0x763258F4E1DCBA90 0x654E7812F9AD3BC0 30 0x763258F4E1DCBA90 0x6543DA12F987EBC0 30 0x763258F4E1DCBA90 0x6C437A1F298DEB50 30 0x763258F4E1DCBA90 0x65B37A12F98DE4C0 30 0x763258F4E1DCBA90 0x654E7A92F18D3BC0 30 0x763258F4E1DCBA90 0x6543D812F9A7EBC0 28 0x763258F4E1DCBA90 0x6C43781F29ADEB50 28 0x763258F4E1DCBA90 0x65B37812F9ADE4C0 28 0x763258F4E1DCBA90 0x654E7892F1AD3BC0 28 0x763258F4E1DCBA90 0x6543DA92F187EBC0 28 0x763258F4E1DCBA90 0x6C437A9F218DEB50 28 0x763258F4E1DCBA90 0x65B37A92F18DE4C0 28 0x763258F4E1DCBA90 0x6543D892F1A7EBC0 26 0x763258F4E1DCBA90 0x6C43789F21ADEB50 26 0x763258F4E1DCBA90 0x65B37892F1ADE4C0 26 0x763258F4E1DCBA90 0x65437A12F98DEBC0 24 0x763258F4E1DCBA90 0x65437812F9ADEBC0 22 0x763258F4E1DCBA90 0x65437A92F18DEBC0 22 0x763258F4E1DCBA90 0x65437892F1ADEBC0 20
私はこの順序で位置をチェックし始めました。なぜなら、私は最速の検索は最大距離の位置を探すだろうと思ったからです。 実際、リストの最初の要素は数秒でチェックされましたが、距離が42の最初の位置については、10分待ってから検索を停止する必要がありました。
この時点で、私は少し落ち込んで、可能性のある動きの列挙の順序を決定するためのヒューリスティックの導入、および実際にはA *アルゴリズムのより慎重な研究について考え始めました。 しかし、慣性によって、リストの最後の要素を確認することにしました。
#include <iostream> #include <tchar.h> #include "initializer.h" int _tmain(int argc, _TCHAR* argv[]) { Initializer m(0x763258F4E1DCBA90, 0x65437892F1ADEBC0, 59); m.solve(); return 0; }
プログラムが解決策を見つけたことをすぐには理解していませんでした:
Distance: 20 7632 6543 58F4 7892 E1DC F1AD BA90 EBC0 00032103210321032330111223010323032112233000121221 Count: 6117348 Time: 2.404
たった2秒半で。
クエストが完了しました。
いつものように、 GitHubのソース。