
非常に 興味深い 記事を読んだ私がquadrocopterを構築することに決めた日からほぼ1年が経過しました。 特性の推定、コンポーネントの選択、品質と価格の完璧なバランスの発見に時間がかかりました。 その後、世界中からの小包への憧れの月がありました。 フレームの設計と製造、多数の部品の単一システムへの組み立て、はんだ付け、フラッシング、チューニング、チェック、部屋での最初のti病なフライトはすべて、初心者のために冬と空飛ぶ天気まで続きました。 それから、クワッドのハエの場所への輸送を簡単にするために、フレームが折り畳まれている必要があることを理解するようになりました、再び設計、製造、組み立てなど。
写真ハンサム
組み立てられた
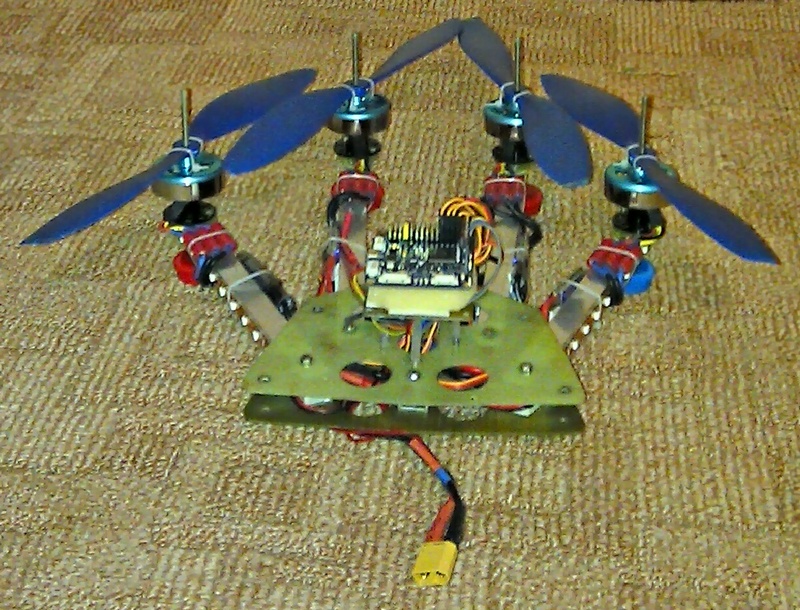
飛ぶ準備ができて

飛ぶ準備ができて
シミュレーターの仮想クワドロコプター、室内のマイクロヘリコプター、およびマイクロクワッドリックでの飛行を繰り返した後、操縦スキルは「大きな」クワッドを制御するのに十分であるように見えました。 5月の休暇の初めに、彼は最初のシーズンを開き、十分に群がり、ほとんど落ちませんでした。 次のフライトの日に、私はもっと欲しかったので、上からビデオを撮影しました。 カメラは電話のみでした。 彼はボードにスクリードとスコッチテープで固定されていました。 ビデオは望ましいものを残していますが、すべてがうまくいきました。
開発の次の段階は、一人称フライト(一人称視点(FPV)-一人称視点)です。 これに必要な詳細が記載された小包を1か月以上待ちますが、今すぐ試してみたいと思います。
その後、アイデアが浮かびましたが、この実装をこの記事で共有したいと思いますが、長いおもちゃから思われたように、私のおもちゃを自慢したくありません。
アイデア自体
カメラを飛行するには、カメラ自体、送信機、受信機、モニターが必要です。 これは必要最小限です。 また、空中のモデルで何が起こっているかを知ることを強くお勧めします。 OSDシステム(オンスクリーンディスプレイ)は、ヘディングカメラから直接オーバーヘッド情報(人工地平線、コンパス、離陸方向、現在の座標、高度、速度、バッテリー電圧、電流消費、使用済みバッテリー容量、飛行時間、すべて)を重ね合わせます。
最小限のセットでFPVフライトがどのように見えるかを確認できます。 カメラは電話にあり、 Wi-Fiモジュール(ビデオの送信に使用されます)と多くの便利なプログラムを備えたAndroidも備えています。 地上のモニターとして、同じAndroid搭載のWi-Fiモジュールを搭載したタブレットを使用しました(ただし、2番目の携帯電話でも可能です)。
手続き
- 両方のAndroidデバイスにアプリケーション ( WebOfCam )をインストールします 。 ヘリコプターの電話をウェブカメラに、2番目のデバイスを端末に変えて、このカメラからのビデオストリームをほぼリアルタイムで見ることができます。 ロールは、アプリケーションの初回起動時またはその設定で選択されます。
- オペレーティングシステムを使用するデバイスのいずれか(シアン2.3.7設定=>ワイヤレスネットワーク=>モデムモード、ここではアクセスポイントの設定とオン/オフのチェックマーク)またはサードパーティアプリケーション(WiFiテザリングなど)を使用して Wi-Fi アクセスポイントを作成し 、以前にモバイルインターネットを切断した。
- 2番目のデバイスから作成された無線LANに接続します。
- 両方のデバイスでアプリケーションを起動し 、最初のカメラの画像を2番目の画面に表示しました。
そして、すべてが簡単です。クワッド、制御機器、携帯電話、タブレット(私の場合)、
警告と注意
離着陸は、サードパーティからモデルを見て行うのが最適です。
モデルを失くすことなく、カメラの位置、方向、位置を明確に想像しながら、徐々にカメラに移動する必要があります。
また、私たちの「フィールド」ワイヤレスLANの狭い範囲についても覚えておく必要があります。遠くを飛び回らないでください。
写真には少し遅れがあります。 常にサードパーティ管理に切り替える準備ができている必要があります。
マイナス面はWi-Fiと制御機器の1つの周波数範囲(2.4 GHz)かもしれませんが、問題はありませんでした。
そして、 これは本当のFPVではなく、フルセットを待っている間にどのように見えるかを忘れないでください!
この情報がお役に立てば幸いです。幸運とソフトランディングをお祈りします。