現時点では、ロボット工学における人工知能(AI)の使用に関する現状は、インターネットのロシアのセグメントでは十分にカバーされていません。 この状況を修正したいという欲求は、インテリジェント制御システムの開発に関連する資料の出版を促しました。 この論文は、自動制御システム(ACS)を設計するための人工知能(ファジーロジック(NL)、遺伝的アルゴリズム(GA)、ファジーニューラルネットワーク(NNS))の歴史的発展を考慮しています。 設計手法の比較は、Arduinoプラットフォームに基づくロボットの例で実行されます。
はじめに
現在、効果的な高度な科学集約型情報技術(IT)(さまざまな科学技術分野で作成)の開発、開発、および実装は、使用されるプロセスおよび制御システムの知能レベルを開発および向上する必要性と密接に関連しています。 、制御オブジェクト(OS)の特定のモデルに実際に存在する制限および情報境界。
制御システムの理論と設計では、現在、複雑な物理OSの最新の高度なITインテリジェント制御の集中的な開発と質的改善における堅牢なインテリジェント制御システム(IMS)の役割と効果的な使用を特定することに多くの注意が払われています。
物理システムの記述の複雑さは、OSモデルを近似し、予期しない状況や情報リスクで制御目標を達成するために必要かつ十分な条件を保証しない近似ソリューションを適用する必要性につながります。 したがって、理論および制御システムにおいて、意思決定のリスクを減らすための効果的なアプローチの1つは(OSモデルの記述の不完全性から)、堅牢なICS構造の開発です[1]。
インテリジェント制御システムの進化
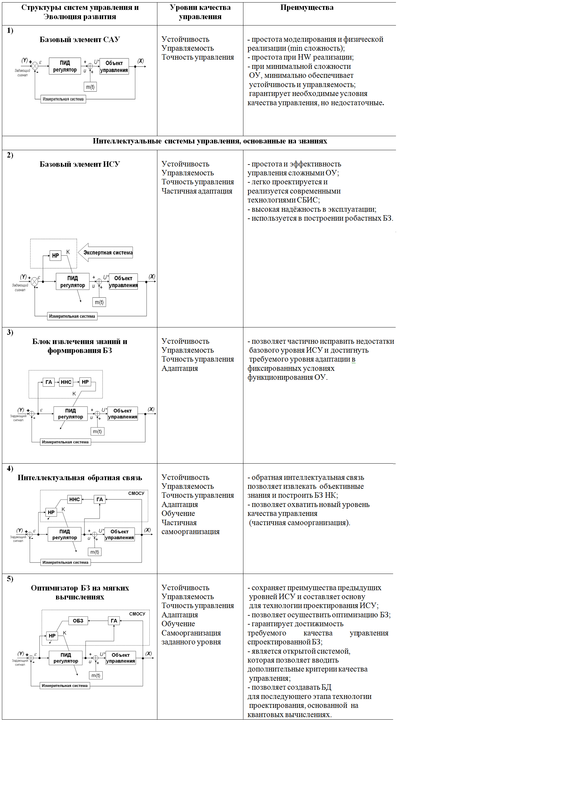
本質的に非線形でグローバルに不安定なOCの制御問題は、OCのさまざまなタイプの確率的外乱の存在下で研究されます。 確率論的モデリングの開発されたシステムを使用して、従来のPIDコントローラーの形での自走砲のアクチュエーターの使用に基づく古典的な自走砲の制限の可能性が決定されました(表1、位置1を参照)。 研究の結果、次の事実が確立されました:一定のゲイン係数を持つPIDコントローラーに基づく古典的な自走砲は、非ガウス(レイリーなど)の確率的ノイズの影響下でグローバルに不安定で実質的に非線形なオペアンプの場合、制御問題に対処できないことがよくあります。また、測定チャネルの時間遅延の条件でも。
この事実は、次の状況によって説明されます。 従来の自走砲は、グローバルネガティブフィードバックの原理と制御誤差補正方法に基づいています。 ただし、複雑なオペアンプ(以下のArduinoロボットの例)では、制御エラーの最小値など、制御品質の1つの基準だけで最適化結果を得るだけでは不十分です。 したがって、実際には、複雑なOSを使用してISUを設計するときに、次の問題が発生します。管理システムの品質に関する他の追加の基準を制御システムに導入する方法。
表1. ISUの進化
このような基準には、たとえば、OSでのエントロピー生成の最小値、および/または制御システム自体でのエントロピー生成の最小値(熱損失、施設および制御システムでの有用な作業の損失を考慮に入れたもの)、またはその他のより複雑なベクトル制御品質基準が含まれます。
ご注意 A.A.の作品では、物理制御理論の構築に関する同様の関連する問題が検討されました。 クラソフスキー、S.V。 エメリャノワ、Yu.I。 A.G.サモイレンコ ブトコフスキー、L.I。 ロゾノア、R。ポプラフスキー、AM Tsirlina A.P. フラドコバなど その他
一定のゲイン係数を持つ標準PIDコントローラーの設計プロセスを使用してこの問題を解決することはほとんど不可能です。 特に前述の制御ケースでは、古典的な自走砲の制御品質の複雑な基準を実装する機会が限られているため、困難な状況で人間の専門家が使用する制御戦略を使用することに近いアイデアに基づいて、MISの開発の出発点となりました。
最初の段階では、ファジィセットとファジィ推論の理論に基づくいわゆる「ソフトコンピューティング」が、「ヒューマンマシン」制御戦略のモデル化に使用され始めました。 したがって、たとえば、表1-1に示されている構造は、ACSの古典的な構造にコンポーネントブロックを順番に構築することで(この場合、ファジー推論ユニットを導入することにより)エキスパート制御システムの表1-2に変換され、ISUの第1世代の例です(図1)。
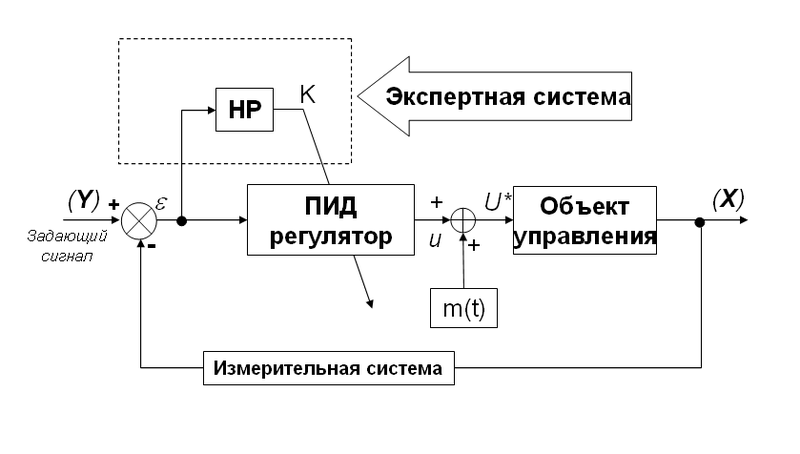
図 1.ファジーコントローラーを備えた制御システム
したがって、MISの第一世代はファジーエキスパートシステム(ES)でした。 これらのESの主な役割は、知識ベース(KB)の質によって果たされました。知識ベース(KB)は、人間の専門家の経験と主観的な知識によって決定されました。 ただし、複雑な確率的ノイズの影響下でグローバルに不安定で実質的に非線形なオペアンプを制御する場合、経験豊富な人間の専門家でさえ最適な(制御品質の観点から)知識ベースを見つけることは困難です。 この問題は、すべての最初の(およびその後の修正)ISUのボトルネックです。 したがって、OSの複雑さと専門家によって提供された情報の主観性のために、知識の抽出および知識ベースの形成(ISSの設計技術の基礎として)のためのツールとしてのESの使用は、期待される大きな成功につながりませんでした(多くの産業実装の例がありますが)。
設計技術の観点から見ると、第1世代MISを導入する主な問題は、OSパラメーターの変化に対する弱い適応性です(たとえば、OS構造の経年変化や外部環境の急激な変化によって引き起こされます)、および得られた制御則のロバスト性が低いことです。 このような問題を解決するために、第2世代のIMSは、GA、NNS、およびファジーコントローラー(HP)を単一のチェーンに組み合わせたソフトコンピューティングテクノロジーを使用して開発されました。 これにより、HPの知識ベースの構造とパラメーターの形成段階で、専門家の主観的な意見を排除することができました。 次に、ソフトコンピューティングに基づくISUの開発により、KB構造の形成に対するいくつかのアプローチが生まれました。 最初は、GAからある程度粗いトレーニング信号(OS)を形成し、取得したOSをNNSで近似することで知識ベースを抽出することが計画されていました。 第2世代のISUの構造は、第1世代のISUの構造に、GAおよびNNSを含むユニットを導入することで表されます(表1-3を参照)。
その後、第2世代のMISは、表1(位置4)に示すインテリジェントグローバルフィードバック (IOS)と呼ばれる新しいタイプのフィードバックの使用を開始しました。 その使用により、OSとACSアクチュエータの最も動的な動作から客観的な知識を直接抽出することができます。 IGOS回路には、最適な制御信号(オペアンプとPIDコントローラー自体の動的および熱力学的挙動に基づく)に関する情報を取得するためのGAと、所定のニューラルネットワーク構造を使用してこの最適な制御信号を近似するNNSが含まれています。 この世代のISUの構造の主な単位は、GAを使用した最適制御信号モデリングシステム(SMOSU)と、GA適合度ベクトル関数のコンポーネントの1つとして定義された制御品質基準です(図2)。
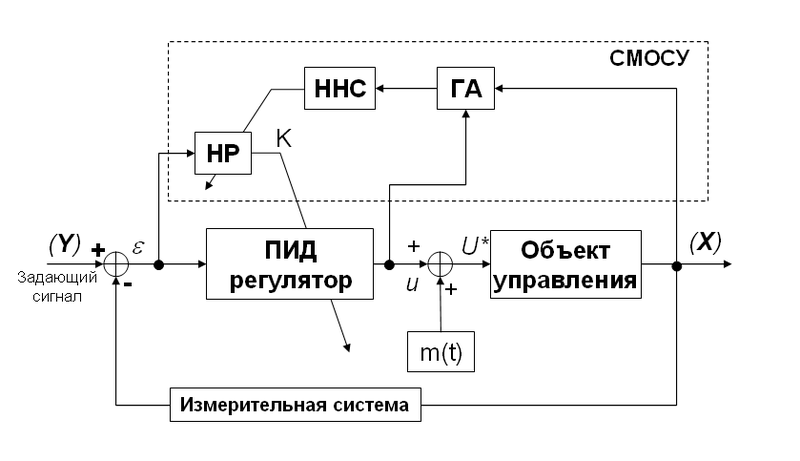
図 2.第二世代のインテリジェント制御システム
IHOSを備えた第5世代ISUによって解決される主な問題は、さまざまな確率的性質の(異なる確率密度関数を使用した)パラメーターおよび外部ランダム摂動の特定のクラスで必要なレベルのロバストネスを達成できる可能性です。 もう1つの重要な問題は、OSの記述の精度(概算)とNNSの構造全体の堅牢性の必要なレベルとの間の必要な関係の決定です。 これらの問題は両方とも、「オプティマイザーオブナレッジベース」(OBZ)と呼ばれるソフトウェアツールを使用してISUのナレッジベースを構築する技術の第2段階で解決されます(図3)。

図 3.第5世代のインテリジェント制御システム。 ソフトウェアツールキットOBZを使用
このようなシステムの設計例を使用して、ISUの設計をさらに詳しく知ることができます。
インテリジェントなマニピュレーター制御
物理的に測定された信号から知識を抽出する方法
リモートKB設定
ISAUの使用例を考えてみましょう。
数学モデルとロボット
「キャリッジ-倒立振子」タイプのオブジェクトの制御(図4)は、制御理論の典型的なタスクの1つです。 この問題の解決策は、自走砲の品質を明確に示しています。 軸に固定された倒立振子を備えた単軸キャリッジの形のモデルのダイナミクスを検討します。
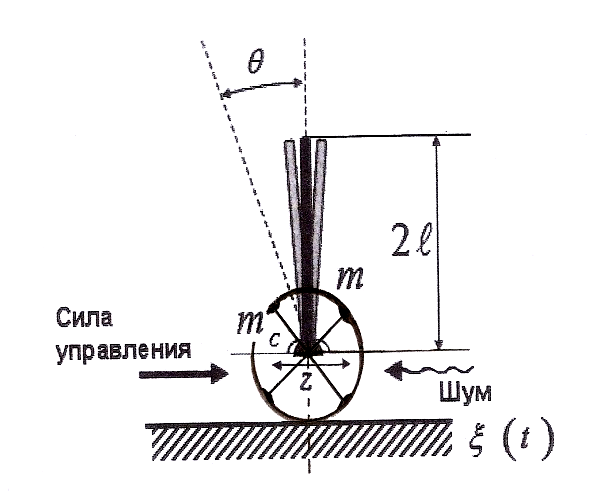
図4「キャリッジ-倒立振子」システムのモデル
このOCのダイナミクスは、水平Z軸上のモーメントと力の投影のバランスから、摩擦力とキャリッジの弾性を考慮して導出された2次微分方程式のシステムによって記述されます。

エントロピー生成率の方程式は次のとおりです。
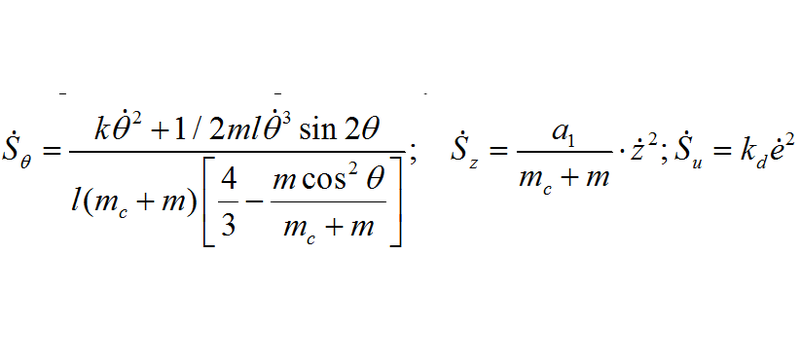
方程式zおよびthetaでは、一般化された座標。 gは重力加速度、msはトロリーの質量、mは倒立振子(「ポール」と呼ばれる)、lは振子の長さの半分、kとa1はそれぞれzとシータの摩擦係数、a2はトロリーの弾性力、「xi」外部確率的ノイズ、uは制御電力です。
動的システムには、グローバルな動的不安定性があります。制御力がない場合、たわみ角度の無限の増加、つまり 振り子が落ちる。 システムを制御するタスクは、変化する動作条件の下で、振り子を垂直位置(振り子軸の垂直から0への偏差の角度)に保持(安定化)するように(トロリーの制御力を使用して)動作することです。
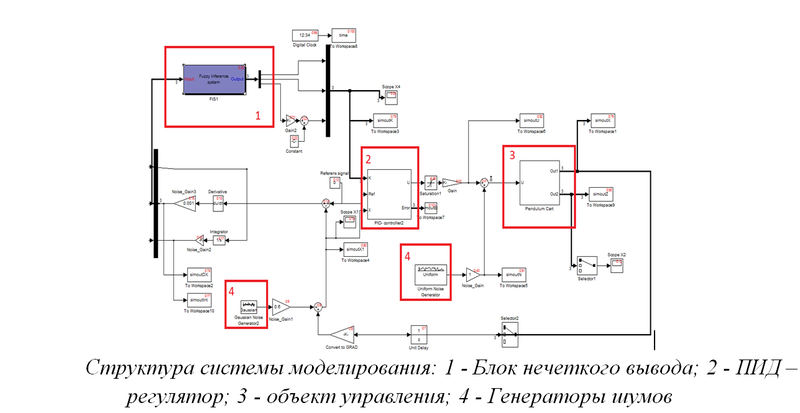
図5 Matlab Simulinkで実装された数学モデル
モデル(図5)には、PIDコントローラー、制御および測定システムのノイズ、コントローラー用の信号を生成するブロックが含まれています。
このコンピューターモデルを使用して、トレーニング信号を取得し、SSCを使用して知識ベースを設定します。 一般的な知識ベースを使用して知識ベースを構築する主な段階は、[1,9]で検討されています。
このタイプのオペアンプは、堅牢なインテリジェント制御のソフトウェアツールをテストするための典型的な(ベンチマーク)です。 そのようなシステムの例は[2-8]で検討され、図に示されています。 6。

図 6.同様のオペアンプ
同様のOSレイアウトのデバイスを検討してください。 図 図7は、SSSを使用してISAUの設計技術をテストするために使用されるレイアウトを示しています。 このタイプのロボットについては、 ここで詳しく検討します 。
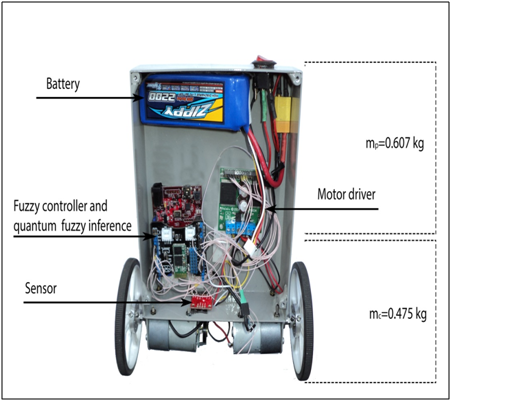
図 7.システムレイアウト
測定システム(図7、センサー)として、モデルでは、センサーとジャイロスコープと加速度計の組み合わせを備えたボードを使用します-5 DoF(5自由度)IDG500 / ADXL335。 システムの中核となる中心要素は、ATmega328プロセッサに基づくArduinoマイクロコントローラーです。 ボードには、プロセッサからコンピュータにデータを転送するためのUSBコネクタが装備されています。 USBインターフェイスは、実験中にデータの送受信(制御アクションの偏差角度と大きさ)のほか、以下で説明するリモート設定に使用されます。 センサーは、マイクロコントローラーのアナログ入力を使用して接続されます。
レイアウトプログラムの基本機能を図に示します。 8.、一般に、それらは擬似コードで書くことができます:
•測定
•フィルタリング
•管理
•カウント時間(遅延)。
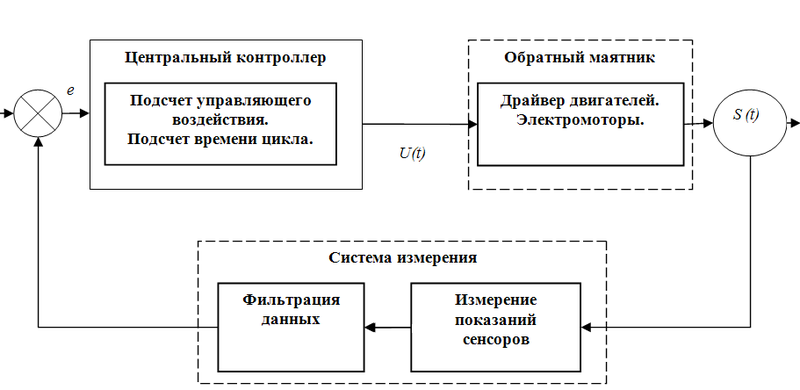
図 8.ロボット操作アルゴリズムの擬似コード
図に示すシステムレイアウトのアルゴリズムに注意してください。 図8は、前述の閉ループ自走砲の特定の例です(表1-1)。
実験
コントローラーの堅牢性をテストするには、2つの制御状況を使用します。
1)典型的な状況-レギュレーターを開発する対象(OSおよびマットに記載されている状況。モデル)
2)予期しない状況1-システム内の追加ノイズ(実験ではクループを使用)
3)予期しない状況2-制御遅延が3倍に増加します。
このビデオでは、3種類のコントロールを示しています。
1)クラシックPIDコントローラー
2)OBZに基づくファジーレギュレーター
3)隠された量子情報を使用した新しいタイプの計算に基づいた量子レギュレーター(量子レギュレーターとISUに類似した設計技術の説明はこちらとこちら )。
結論
ファジーレギュレーターとMISのこの設計技術の構造には、次のものが含まれます。
o数学モデルの最適な制御と検証のための検索のための多基準GA
oファジーニューラルネットワークにより、GAの助けを借りて見つかった最適な制御信号を近似し、それに基づいて「最適な」知識ベースを抽出します。
o情報エントロピー基準を使用したGAに基づく知識ベースの「微調整」。
OBZを使用すると、初期情報の不確実性の条件で、複雑なOSの最大レベルの信頼性と制御性を備えた最適なISUを設計する原理を実装できます。
IMSの構造にOBZの助けを借りて設計された知識ベースを使用すると、自走式銃の産業用途の分野が複雑な動的OSに拡大します。
参照資料
1. Ulyanov S.V.、Litvintseva L.V.、Dobrynin V.N.、Mishin A.A. インテリジェントで堅牢な制御:ソフトコンピューティングテクノロジー、モスクワ:VNIIgeosystem、2011年。
2. Grasser、F.、D'Arrigo、A.、Colombi、S.およびRufer、A. Joe:倒立振子。 // IEEE Transaction Electronics。 -2002。-Vol。 49.-いいえ1.-pp。 107-114。
3.チェ・D、オー・J・H 低次外乱オブザーバによる車輪付き倒立振子の人間に優しいモーションコントロール//ロボティクスおよびオートメーションに関するIEEE国際会議、米国カリフォルニア州パサデナ、2008年5月19〜23日。 2521-2526。
4. Nawawi SW、Ahmad MN、およびOsman JHS、二輪倒立振子モバイルのリアルタイム制御システム-ロボット、//実践的な高度な知識アプリケーション/ I.フュルストナー(Ed)。 -InTech。 -2010 .-- pp。 299-312。
5. Gocmen A.二輪電気自動車の設計。 -マスターサイエンス。 論文。 -アティリム大学、テムズ。 -2011。
6.竹ネカT.、平野M.、泉H.、桑原K.、小山K.、小橋Sh。 倒立振子移動車両。 -特許US 8,224,891 B2。 -特許の日付。 -7月 2012年24月。
7. Castro A.二輪倒立振子のモデリングと動的解析。 -修士論文。 -ジョージア工科大学、アトランタ、米国。 -2012。
8. Nasir A.、Ahmad N.、Ghazali R.、Pakheri N.高度に非線形な2輪バランシングロボットのファジィロジックコントローラー(FLC)とPIDコントローラーのパフォーマンス比較//第1回国際情報と計算知能に関する国際会議。 -IEEE Computer Society。 -2011。-pp。 176-181。
9. Reshetnikov AG、ウリヤノフSV、物理的に測定されたトレーニング信号から知識を抽出する方法:ファジーコントローラーの知識ベースの設計、「科学と教育におけるシステム分析」El No. FS77-51141、2012年9月14日。 発行番号1、2013