はじめに
数学ソフトウェアをテストするためのモックアップを設計および開発しています。 レイアウトは、さまざまな構成のモバイルプラットフォーム(カート)です。 原則として、トロリーは1つの機能を実行します-それらはターゲット機器(スキャンレンジファインダー、ビデオカメラ、制御システムを備えたラップトップなど)のキャリアです。 すべてのトロリーには完全なソリューションがあり、金属またはプラスチックで作られており、エンジンの制御とセンサーからのさまざまな情報の収集を担当する低レベルの制御システムが搭載されています。
 |  |
既製のトロリーには、いくつかの重大な問題があります。
- 目的のタスクを実行するために必要な機器を設置することは困難です。 多くの場合、作業の過程で、使用する機器の命名法とその場所が変わることがあります。 金属体の穴あけ、鋸引き、および修正は、非常に時間のかかるプロセスです。 従来の両面テープは、「すべてのもの」であり、その結果もすべて異なります。
- 各トロリーには独自の制御システムがあり、開発者をハードウェアと制御システムに結び付け、プログラマーの貴重な時間の大部分を占めています。
- カートとそのコンポーネントの高コスト。 既製のソリューションとスペアパーツを迅速に購入できないこと。
これらすべてが、シンプルで統一された制御インターフェースを備えた任意の機器の痛みのないインストールの可能性がある、彼らが言うように、コンポーネントからの普遍的であまり高価でないプラットフォームが必要であるという完全に自然なアイデアにつながりました カートは、製造と組み立てが簡単でなければなりません。 原則として、厳密な要件はレイアウトに課せられません。それはレイアウトです。
コンセプト。
ブレーンストーミングの結果、将来のプラットフォームの概念が生まれました。
- ホイールフォーミュラ6ホイール、すべてをリード。 設計を簡素化するために、アクティブなサスペンションは必要ありません。 同時に、すべてのボードエンジンは並列に接続されているため、将来的には単一の制御システムを使用して、より少ないホイールでカートを作成できるようになります。
- トロリーケースは、必要な機器を比較的迅速に設置して通信を行うことができる取り扱いやすい素材でできています。
- UARTまたはUSB(仮想コンポート)を介したカート制御-ラップトップ、シングルボードコンピューター、無線モジュールを接続できます。
- 最寄りの適切な店舗のギアモーター、ホイール、電子機器、バッテリー。
POLOLU Dagu Wild Thumper All-Terrain Chassisの完成したプラットフォームについても言及したいと思います。

このプラットフォームは当社のコンセプトに可能な限り適合し、金属ケースの存在が多数の取り付け穴によって補償されていても、機器の設置は問題を引き起こしませんでした。 しかし、親しい関係で、重大な設計上の欠陥が現れました。 主なポイントは、ホイールとギアモーターの連結であり、批判に耐えることはできません。

主な負荷は、ギアモーターの出力軸が回転する滑り軸受にかかるため、長時間の使用と激しい負荷では、このユニットの故障が保証されます。

2番目のポイントは、シャフトとホイールのアダプターです。この要素は真鍮で作られており、テスト中に珍しいことではない大きなバックラッシュでシャフトに固定され、移動中にホイールの1つがシャフトから飛びました。
要約すると、私たちの問題を解決するためのプラットフォームとして、Dagu Wild Thumperは適切ではないと言いたいです。
しかし、彼らが言うように、銀の裏地はありません。 このトロリーのギアモーターとホイール自体は、コンポーネントとして非常に適しています。軸を備えた信頼性のあるベアリングブロックを設計および製造するだけで、荷重全体を負担できます。
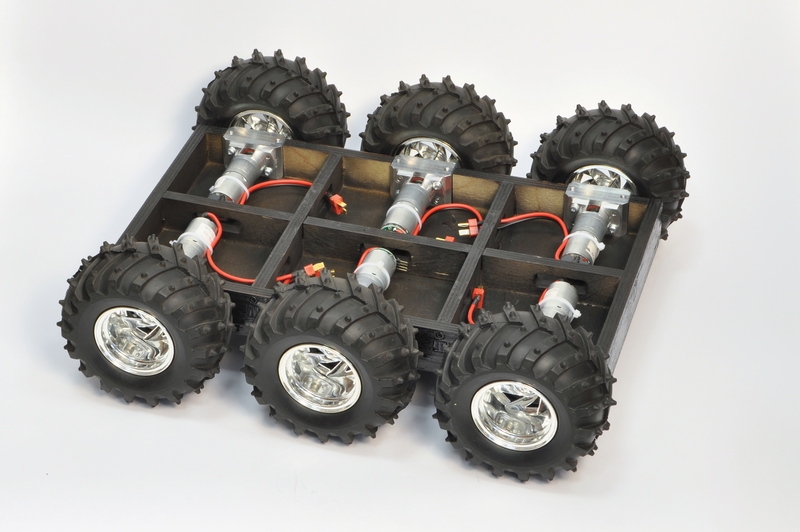
プラットフォーム。
モーターホイール。
ベアリングブロックは、研究所の生産拠点で製造されました。

2つのベアリングがブロック本体に押し込まれています。軸には環状ロックがあり、ギアモーター用のアダプターです。




Dagu Wild Thumperの親カートからのホイールとギアモーター。
ユニットは、厳しい負荷に耐えることができる非常に信頼できるユニットであることが判明しました。 唯一の、おそらく非常に重要なもの:このユニットの製造には、CNCフライス盤と資格のある専門家が必要です。 写真では、モーターのシャフトにインクリメンタルエンコーダーが付いています。
体。
このケースに最適な材料は、ある程度の審議の後、(驚き、驚き)合板でした。 しばらくして材料の外観が得られた図面には、補強材が十分に装備されていました。
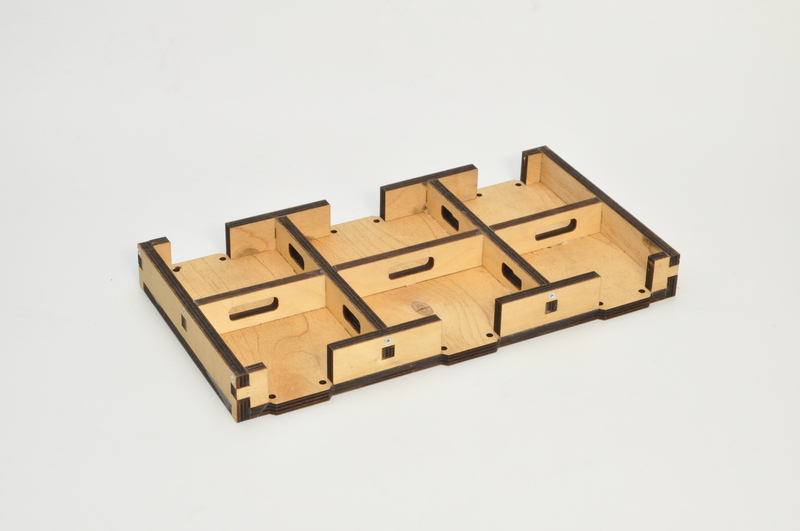

シート材料のレーザー切断が利用可能になったため、このようなケースのバッチ全体の製造は難しくなく、費用もかかりませんでした。 この場合のさまざまな機器のドリル、ソーイング、ネジ止め、およびその他の変更(長いライブPVA接着剤およびセルフタッピングネジ)に問題はありません。
プラットフォームアセンブリ。
本体はスプレー塗料で塗装されています。 中型エンジンには、回転数をカウントするためのインクリメンタルエンコーダーが含まれています。 モーターコネクタはRCモデルの標準です。
下位レベルの制御システム。
制御システムには、トロリーと同じ要件があります:コンポーネントへのアクセス性と製造の容易さ。 コレクターモーターを管理するための既製のソリューション。 同じPOLOLUには多くの適切なオプションがありますが、重要なポイントがあります-システム全体に1つの「USBコード」が必要です。
私はATMELコントローラーとアセンブラーと長い間友好関係にあり、小さなプリント回路基板を作成することも問題ではありません。 ボードの設計と製造を簡素化するために、市販のマイクロプロセッサモジュールを使用します。 モジュールはARDUINO Nano Atmega328を使用しました。 モジュールはサイズが小さく、オンボードで、プロセッサに加えて、USB通信、いわゆる仮想COMポートを提供するFT232RLチップがあります。 内部から、彼の以前の生活に関連していたものはすべて消去され(Arduinoのことはご容赦ください)、必要なバインディングでプリント回路基板が作られ、新しいファームウェアがアップロードされました。

スキームには以下が含まれます。
- USBインターフェイスを備えたマイクロプロセッサモジュールARDUINO Mini Atmega328。
- PWM制御を備えた2つのHブリッジパワートランジスタ。
- Li-Poバッテリーの放電を監視するための電流センサーと電圧センサー。
- システムの動作モードを示すLED。
- 外部電源およびモーター用のコネクター。
- インクリメンタルモーターエンコーダーのコネクタ。
- ADCコントローラーの入力に接続されたアナログセンサーを接続するためのコネクター。
- UARTインターフェイスコネクタ。
ファームウェアはアセンブラーで書かれており、コマンドプロセッサです。つまり、UART(USB)を介してパラメーター付きのテキストコマンドが入力され、コントローラーはそれを処理して実行します(たとえば、スターボードエンジンに公称値の25%の電圧を与える)、コントローラーの反対方向にエンコーダー値、バッテリー電圧、ADC測定値などを送信します。
その結果、テキスト制御コマンドが送信されるカート用のUART(USB)制御チャネルがあり、テレメトリやサービスデータなどの応答行が取得されます。 無線モデム(X-Bee)からタブレットコンピューターに至るまで、さまざまなデバイスがこのインターフェイスとインターフェイスします。 これは別の記事のトピックであるため、管理システムについては詳しく説明しません。 しかし、最上位制御システムとしてUARTを介して接続されているデバイスの1つについては、さらに説明します。
ラズベリー、彼女はトップレベルの管理システムです。
もちろん、私たちはRaspberry Piについて話しています。 手頃な価格、安価、コンパクトなLinux。 ボードにはすべてがあり、USB経由で接続されていないものがあります。
カート制御アルゴリズムは、最新のグラフィカルインターフェイスを使用して、カート自体に直接プログラムできます。 モニターとキーボードを接続するだけです。
ラズベリーとアルドゥイーノに参加します。
ラズベリーのGPIOコネクタには、UART、I2C、SPI、+ 5Vの電源があり、足だけです。

自然にこのバスに接続されている膨大な数のセンサーがある場合、無駄になるi2cバスは空のままにしておきます。 その結果、ジャイロスコープと加速度計を備えた素晴らしいデバイスがアダプターボードにインストールされます-本格的なナビゲーションモジュール。 ラズベリーはマイクロUSBコネクタから電力を供給されますが、これはあまり便利ではありません。コネクタ自体が脆弱で、常に手元にあるとは限らないため、結果として外部+ 5vコネクタがアダプタに出力されます。
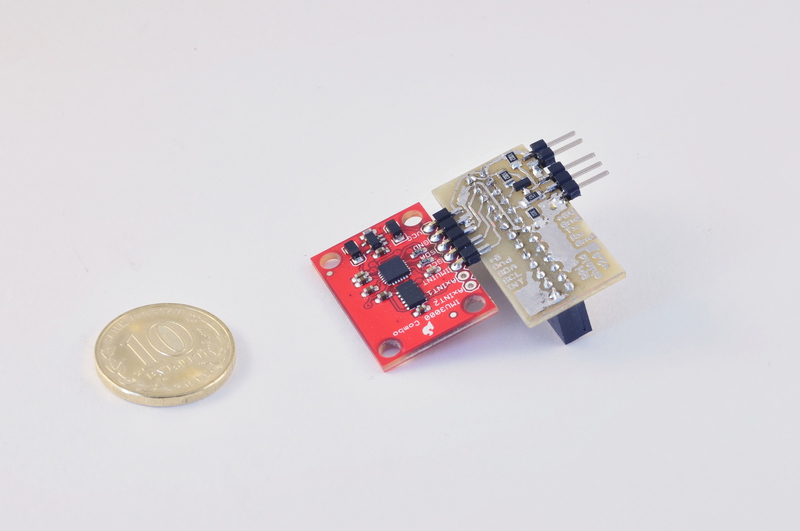

アダプタボードは、すべてがプラスチックケースに収まるように作られており、ピンUARTと電源+ 5vが引き出されています

ラズベリーの栄養について個別に言及したいのですが、USBコネクタからの5ボルトに厳密に制限されており、決定には議論の余地がありますが、やるべきことは何もありません。 この目的のために、私はアマチュア無線モデルで使用されるBECスタビライザーを使用します。サイズが小さく、大きなマージンで十分な電力(3A)があり、要件を完全に満たしています。

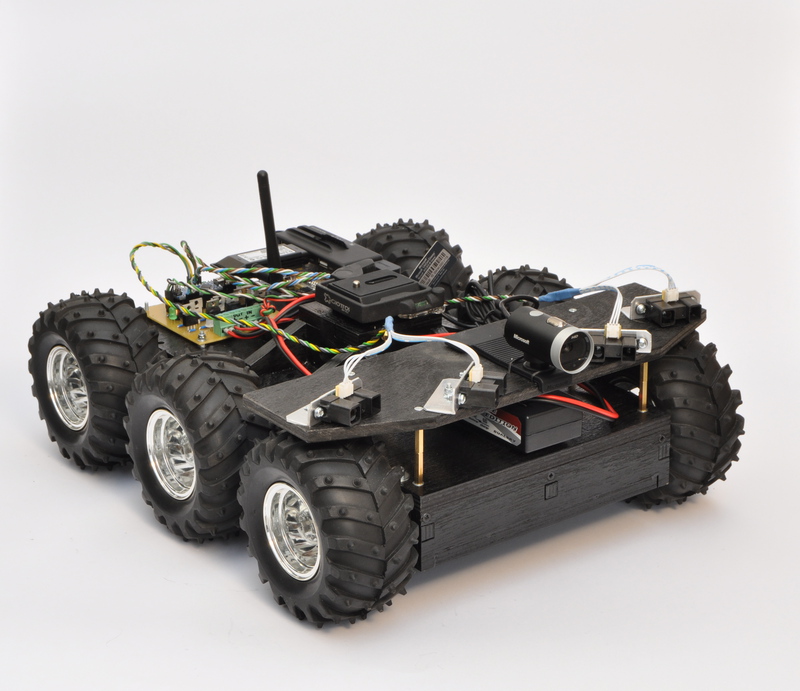
フルボディキット。

- Atmega328コントローラーに基づいた低レベル制御システム。
- インクリメンタルエンコーダー付きギアモーター(左側と右側)
- IR距離センサーSHARP GP2Y0A02YK0F、アナログ出力付き
- リポバッテリー7.4V
- 5V電源安定装置。
- Raspberry Piトップレベル管理システム
- Raspberry Piの一部としてのUARTアダプターとi2cナビゲーションモジュール。
- USB Wi-Fiモジュール。
- USB WEBカメラ。
Linuxを搭載したWi-Fiトロリーとあらゆる種類のバンを備えた創造性にどのような自由がもたらされるかという話は、明らかにこの記事の範囲外です。 この部分では、すべてが明確だと思います。
結果。
結論として、私はタスクが解決されたと言いたいです。 私たちは、安価な部品から「残念ではない」ケースを備えたトロリーを持っています。 唯一の例外はベアリングブロックですが、これは信頼性と運搬能力の価格であり、カートは非常に重い機器を運ぶことができます。 下位レベルの制御システムは、エンジンの数と接続されているセンサーの範囲に応じて簡単にスケーリングでき、Raspberry Pi(UART)またはラップトップ(USB)などの上位システムと簡単に統合できます。 Raspberry Pi