しかし、科学者は比較的最近、歩行者の流れの挙動の信頼できるモデリングという前述の問題に真剣に取り組み始めました。 この記事では、既存の歩行者の流れのモデルを読者に紹介し、その特性と機能について説明します。
研究者は、80年代後半から20世紀初頭に大惨事、難破船、事故の結果を研究した後、このトピックに興味を持ち、建物や船の建設の欠陥を明らかにしました。 標準では、これらの設計は検査の要件を満たしていましたが、緊急事態では、予期しない「ボトルネック」が開かれ、悲惨な結果につながりました。 しかし、通常の状況と危機的な状況の両方で、検討中の構造内を移動する人間の流れをシミュレートし、その挙動を考慮することが可能であれば、オブジェクトは変更され、建設前でも安全になります。
歩行者の交通をモデル化するときに発生する主な問題は、信頼できる行動を作成するのが難しいことです。 移動するとき、私は目的地に到達するように努力します(そして、どのように?できるだけ速く?ゆっくり歩きます?)、そして他の歩行者と衝突しないようにしようとすることは論理的です。 しかし、実際には、私は完全に非論理的な(私の観点から)行動に直面することはめったにありません-渋滞中の突然の停止、その場での急カーブ、平凡な「すぐ先」...
歩行者の行動の3つの異なるレベルを区別できます。
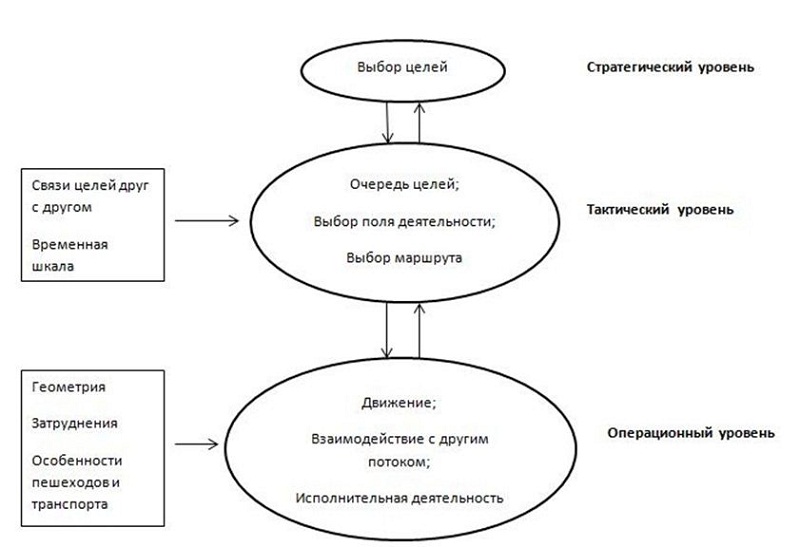
戦略レベルでは、歩行者はどのような目標を達成し、どのような順序でそれらを達成するかを決定します。 戦術レベルは、地形の特性、交通量に応じて最適なルートを選択するなど、短期的なソリューションの選択を担当します。 操作のレベルは、歩行者の動きを直接表します。 衝突などを避けるために必要な即時決定
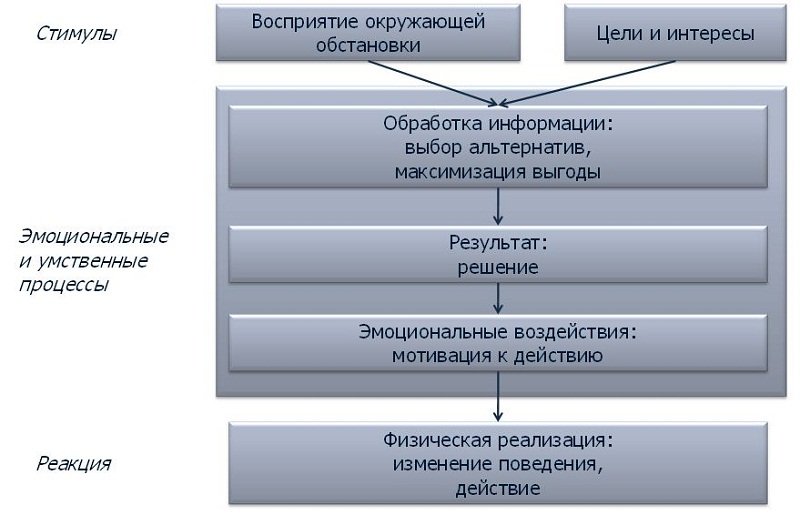
意思決定スキームは次のように表すことができます。
歩行者フローモデルのもっともらしい動作を再現するには、社会学、心理学など、他の分野からの大量の情報を処理する必要があります。この情報を理解することで、2つの上位レベルの歩行者動作で作業する機会が得られます。 運用レベルをモデル化するために、それらは多くの場合、人間の流れを表すさまざまな物理モデルに基づいています。たとえば、チェス盤上の大きな分子または図形で構成される特定の物質としてです。 このアイデアの目的は、可能な限り実装が簡単なモデルを見つけることですが、同時に人間のストリームの「現実的な」動作を再現します。これは実験結果に近く、複数回再現できます。
モデルを選択する際には、モデルに含まれるいくつかのパラメーターを決定する必要があります。
•微視的または巨視的モデルの選択。 微視的モデルの提示では、特定の数の歩行者を区別し、その特性を決定し、経路を追跡できます。 巨視的モデルでは、別個の歩行者を区別することは不可能であり、歩行者の流れは基本です。
•離散モデルまたは連続モデル。
•決定論的モデルまたは確率モデル。 決定論的モデルでは、考えられるすべての反応が定義され、変更されていません。 確率モデルでは、歩行者は同じ状況に対して異なる反応をすることができます。
•ルールベースまたは力ベースのモデル。 ルールベースのモデルでは、現在の状況と歩行者の目標に基づいて決定が行われます。 力に基づくモデルでは、歩行者は他の歩行者およびインフラストラクチャ側から彼に作用する力を「感じる」ため、決定は、その人に作用する力の合計の結果値のサイズに応じて行われます。
•高精度または低精度。 それはモデルの「リアリズム」を特徴づけます。 精度の高いモデルは、可能な限り現実に近い意思決定、パスなどを選択するアルゴリズムを使用して、フローの移動を実装しようとします。 精度が低いモデルには、インテリジェンスがまったくない場合があります。 最初の方法は、モデルの複雑さの増大、変数の数の増加、そしておそらく、応答時間の増加につながります。 大量のデータが処理されます。 精度の低いモデルは、実装が容易で、高速に動作しますが、精度が理想的ではないことに留意する必要があります。
歩行者の流れの既存のモデルの中から特定できます。
•誘引力のモデル:歩行者は磁場中の電荷の形で表されます。 歩行者と障害物はプラスの料金、トラフィックターゲットはマイナスの料金として提示されます。
•キューイング理論を使用して、確率関数を使用して歩行者の交通を記述するモデル。
•セルラーマシン:空間全体は、各歩行者が1つのセルしか占有できないグリッドです。 動きは、特定のルールに従ってセル間の人々の動きとしてモデル化されます。
•気体動力学モデル:ここでは、歩行者は液化ガス中の分子として表示されます。 歩行者分子の正確な速度と位置は不明ですが、代わりに、粒子の統計的分布はボルツマン方程式に基づいて既知です。
•社会的勢力のモデル:ニュートン力学を使用して、歩行者の動きを記述します。 力は社会的相互作用によって生成されます。
•計算モデル:ほとんどのパラメーターは実際の実験のデータに基づいて一度計算されます;歩行者の数と部屋の大きさに対するこれらのパラメーターの依存関係の表が作成されます。 将来、これらのデータは歩行者の流れの動きを記述するために使用されます。
これらのモデルの動作原理をより詳細に検討してください。
1.磁力モデル
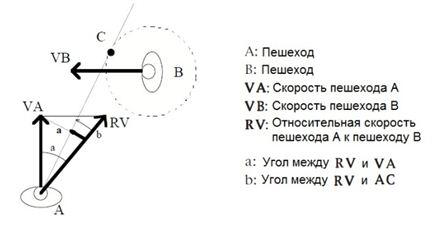
1970年代後半に、岡崎教授と松下教授によって開発されました。 これは微視的な連続モデルです。 このモデルによると、すべての歩行者と障害物は正の電荷を帯びています。 負の電荷は、歩行者が努力する場所に集中します。 歩行者は目標に向かって動き、衝突を避けます。 各歩行者は2つの力の影響を受けます。 1つはクーロンの法則で定義された磁力です。これは、歩行者の電荷の大きさと、歩行者とその運動の目的との間の距離に依存します。
2番目の力は歩行者に作用し、加速を使用して他の歩行者または障害物との衝突を防ぎます。
図 3加速度aは、ベクトルRVをACラインの方向に変更するために歩行者Aに作用します。 ACラインは、歩行者Aから歩行者Bに外接する円への接線です。この円は「個人空間のゾーン」であり、見知らぬ人がその境界に違反することは望ましくありません。 その半径は文化的特性に依存し、S。岡崎の研究では、60センチメートルの円半径が採用されました。
モデルの利点:
•実装の容易さ。
•高速モデル。
モデルの欠点:
•歩行者の個別化の不可能性(身長、体重などの決定)。
•パニック、無礼、緊急事態などの現象を考慮することができない(人間の行動が予測不能になるとき)。
•目標を達成し、他の歩行者または障害物との衝突を回避するように努力する以外は、歩行者に異なる動作ラインを指定することはできません。
2.キューイングモデル
キューイング理論では、運動は確率密度関数の観点から説明されます。 歩行者は一定の確率でサーバーに到着し、サービスを提供し、並んでいます。 キューイングシステムの3つの主要な要素は、到着、サービスメカニズム、およびキューイング(FIFO)です。 Laszlo Lovasは、キューネットワークを整理するプロセスとして、建物内の歩行者をモデル化できる確率モデルを提案しました。 このプロセスでは、各歩行者が他のオブジェクトと相互作用する唯一のフローオブジェクトと見なされます。 作成されたキューネットワークのノードは部屋であり、通信はドアと見なされます。 移動の過程で、人は特定の確率に従って新しいノードを選択し、時刻tから瞬間t + hまでの歩行者数の変化を記述する新しい方程式を導きます。 得られた方程式から、施設から人々を避難させることの有効性(つまり、サイト内の予想される残りの人数と予想される避難する人数)を評価することができます。
3.セルオートマトン(セルオートマトンモデル)

セルラーマシンは、歩行者をシミュレートするための簡単で高速な方法です。 オートマトンのセルラーモデルでは、空間全体がグリッドです。
各グリッドセルは、1人の歩行者が占有できます。 この動きはセルの変化としてモデル化され、いくつかのルールがマシン(歩行者)に適用されます。 これらのルールセットは、このモデルの実装によって異なります。 モデルのいくつかの実装については、後で説明します。
ブルーとアドラーは、歩行の2つの要素である前進運動と紛争解決を特定しました。 前進することは、特定の目標を達成するための歩行者の欲求を示し、各歩行者の速度と加速度を決定することになります。 紛争解決とは、物理的な接触を避けたいという欲求を意味します。
BlueとAdlerが提案する一連のルールは、4つの異なる段階で適用される6つのルールで構成されています。 最初のステップは、ルートを変更するためのルールを適用します。 第2段階では、新しいセルがすべての歩行者に割り当てられます。 第3段階では、各歩行者にプロモーションルールが適用されます。 最後の段階で、歩行者は新しいセルに飛び込みます。
このモデルでルートを変更するには、5つのルールが適用されます。 変更は、隣接するセルにアクセス可能で、歩行者がいない場合にのみ可能です。
1.左右のセルに直接アクセスできるかどうかを判断する
2.隣接するセルが使用可能な場合、ソリューションは一貫性がありませんが、このセルには2つのルートが適用されます。 この段階で、どの歩行者がセルにアクセスするかをランダムに決定します。
3.両方の隣接セルが使用できない場合、ルート変更を完了します。
4.アクティブおよび未使用の隣接ルートの未使用距離を計算します。 距離が一意で最大の場合、このルートに歩行者を割り当てます。 これは、歩行者が可能な限り最大のエリアで矛盾のない経路を選択することを意味します。 一意の最大距離が見つからない場合は、ルール5に従ってルートを割り当てます。
5. 3つのルートが最大距離につながる場合、現在のルートと2つの隣接するルートに80/10/10の分離が適用されます。 2つのルートが最大距離につながる場合、50/50の分割が適用されます。
ルートを決定した後、歩行者は割り当てられたルートに沿って移動します。 これは、第2段階で実行されます。 第3段階では、歩行者に移動速度が割り当てられます。 この段階では、歩行者は一定の確率で場所を変えることができます。 これは、2人の歩行者が互いに向かっている場合に起こります。 ステージ4では、すべての歩行者が移動します。
このモデルは、一方向の歩行者用路地と双方向の流れに適用されました。一方向に移動する歩行者の数は、反対方向に移動する歩行者よりもはるかに多くなります。
Dijkstra、Jessurun、およびTimmermansは、路地で歩行者を動かすことに焦点を当てたモデルを提案しました。 歩行者の移動中に、4つのステップが強調表示されます。
1.歩行者が決定(アクションの終了またはコアネットワークノード)に合格したかどうかを確認します。 これに該当する場合は、手順3に進みます。 それ以外の場合は、手順2に進みます。
2.歩行者がソリューションセル(ネットワークノード)にいる場合は、歩行者の動作を調べ、歩行者を目的の方向に向けます。 したがって、決定が下されます。
3.選択した新しいセルが空の場合、歩行者をセルに移動します。 それ以外の場合は、手順4に進みます。
4.左または右のセルが占有されていない場合は、左または右に移動します。
このモデルでは、運動は目標に向けられ、意思決定の瞬間にのみ変更されます。 他の歩行者との相互作用は考慮されませんでした。
Young Lizhongらは、火災避難用のセルオートマトンのモデルを開発しました。 彼らは、火災(危険度)の場合にルートを計算するための特別なルールを提示しました。 この危険度は、位置の危険度(最も近い出口までの距離で決定)と火災の危険度(火災までの距離で決定)で構成されます。 彼らのモデルは3つのフェーズを定義しています。
1.各歩行者は、自分の見解と比較して、危険度が最小のセルを選択します。 隣接するすべてのセルがビジーであるか、危険度が高い場合、乗員は動きません。
2.複数の居住者が同じセルに移動したい場合、希望する人の1人がランダムに選択されます。 この段階での残りは予想されるはずです。
3.各居住者は危険度を更新します。
4.気体動力学モデル
歩行者のダイナミクスには、液体との明らかな共通性があります。 たとえば、障害物の周りの動きは、障害物の周りの「流体の流れ」に非常に似ています。 中密度の動きは制限されています(短期相関)。 したがって、輸送ダイナミクスに関して、歩行者ダイナミクスの最も初期のモデルが流体力学またはガス動力学理論からインスピレーションを得たことは驚くことではありません。 通常、これらの巨視的なモデルは、力の相互作用に基づいて決定論的であり、精度の低いモデルです。
ヘンダーソンは、大群衆と古典的なガスとの類似性を引き出しようとしました。 低密度(「ガス含有量」)の条件下でさまざまな群衆の動きを追跡した結果、彼は速度分布関数とMaxwell – Boltzmann分布の間の対応を見つけました。
この観察に触発されて、彼は後に歩行の流体力学理論を開発しました。 歩行者間の相互作用を、粒子が運動量とエネルギーを交換する一連の衝突として説明する場合、均一な群衆は気体の運動理論によって説明できます。 ただし、数量の解釈は完全には明確ではありません。 たとえば、圧力と温度の類似物は、歩行のコンテキストにあります。 温度は、必要な速度の分布に関連する速度差と相関させることができますが、圧力は特定の方向に力に逆らって移動するための要件を表します。
ガス動力学モデルには、すべての巨視的モデルに共通の問題である、低い交通量の問題があります。
5.社会的勢力のモデル(社会的勢力モデル)
社会力のモデルは、ヘルビングとモルナーによって開発されました。 このモデルでは、歩行者のさまざまな動機と影響が、さまざまな種類の力によって記述されます。 このモデルは主にニュートン力学に基づいていますが、質量は1です。これにより、力のモジュラスが得られます。 このモデルは、歩行中に発生するいくつかの自然現象を再現できます。
1.通常、歩行者は最速のルートを選択します。
2.状況、性別、年齢、環境などを考慮して、歩行者は個々の速度で移動します。 速度はガウス分布です。
このモデルで使用される力とパラメーターを検討してください(記事はまだ概要なので、数学的な装置なしで説明します)。
1)最も明らかな力はいわゆる駆動力であり、これは歩行者が必要な速度で目標に向かって移動する衝動を反映しています。
2)歩行者間の最も重要な相互作用は、他の歩行者と一定の距離を保ちたいという欲求です。 この行動を説明するために、社会的力のモデルに反発が実装されています。 反発力-歩行者間の距離に応じて-至近距離で最大値を持ちます(ただし、上限を超えない)。歩行者間の距離が長くなるとゼロになる傾向があります。 これは、指数関数を使用して実現でき、歩行者間の相互作用を説明する力につながります。
3)通常、歩行は異方性です。 つまり、歩行者の前での行動は、歩行者の後ろで行われる行動よりも重要です。 人々は他の人々の行動を予測する機会を持っているため、他の人々が行った行動に対応することができます。 社会的勢力のモデルでこれを実現するには、歩行者の視野で行われるアクションは、すべての視野で生成される歩行者のアクションよりも大きな影響力を持つ必要があります。 この動作を説明するために、視野のフォームファクターを実装して、目的の移動方向と歩行者の方向との間の角度に依存し、反発力を示すようにします。

ラムダが1未満の場合、歩行者のトラフィックは異方性と見なされます。歩行者はオブジェクトに対して異なる反応を示します。 前方の物体は、歩行者の横または後方よりも行動に大きな影響を与えます。
4)滑り摩擦力は、高速で短距離を走行する他の歩行者との衝突を回避しようとする歩行者の結果です。
5)アトラクターは歩行者の行動に影響を与える可能性があります。 たとえば、窓や特別なアトラクタは歩行者を引き付けることができ、彼はアトラクタに移動し、一部(火災、警告標識)を怖がらせることができます。 アトラクタの魅力は時間に依存し、ゼロまで直線的に減少します。 アトラクターは、歩行者間の社会的力と同じ方法でモデル化できます
6)歩行者はしばしばグループで歩きます。 分離した後(たとえば、歩行者が障害物との衝突を回避する必要がある場合)、個々の歩行者はグループを再び変換しようとします。 これは、歩行者Aから歩行者Bに作用する重力の影響を受けます。
7)すべての歩行者は個人の行動によって特徴付けられるため、その動きは採用されている法律と異なる場合があります。 この動作は振動で表されます。 振動は通常分布しており、ベクトルに垂直であり、目的の方向を示しています。
社会的力のモデルは、実際に歩行者に影響を与えるさまざまな影響を表す多数の力で構成されています。 すべての力の合計は、歩行者の動きと方向を表します。
シミュレートされたケースに応じて、すべての力を考慮する必要はありません(たとえば、パニックや避難プロセスがモデル化されていない場合、体力を無視できます)。
ところで、PTV VISION VISSIMで歩行者の流れをモデル化するために使用されるのは、社会的勢力のモデルです。
6.モデルの設計
計算モデルの使用には、環境条件に応じて歩行者の流れのパラメーター(速度、密度など)の変化のパターンを特定するために、多数の人々を含む大規模な実験が含まれます。
ロシアでは、いわば「公式モデリング」に、GOST 12.1.004-91「火災安全」を使用できます。 一般的な要件」。これは、ガス運動モデルで行われる方法と同様の歩行者の流れの表現を備えた計算方法に基づいています。 このGOSTは、構成レイアウトの有効性に関するおおよその考えのみを提供します。
GOST 12.1.004-91には、次のような多くの欠点があります。
•定義済みの値への大きな依存(人の水平投影の平均密度の3つのバリアントのみが考慮されます-大人、冬服の大人、ティーンエイジャー。
•人の体格が非常に大きく変化する可能性があるという事実は考慮されていません。
•モデリングの精度が低い(たとえば、人間の流れの減圧は考慮されません。下図を参照)。
•火災安全のみに焦点を当てます。
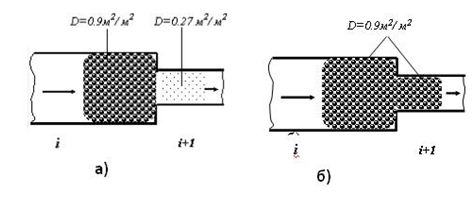
a)歩行者の流れの実際の減圧、およびb)GOST 12.1.004-91による。
----------------------------
これで私はこの記事を終了したいと思います。 このトピックは非常に大きく興味深いものですが、その中の数学については意識的に触れませんでした。 この記事は少なくとも1.5倍に膨れ上がりますが、入門記事では、現在のバージョンは非常に膨大でした。 現時点では、このトピックに特化したロシア語の出版物はほとんどありません。私の記事が興味をそそるなら、私はそれについて嬉しいだけです。