 設置作業の過程で、レベルゲージをタンクにするタスクが登場しました。 時折、オーバーフローのケースがあり、地下に8〜10トンの水があり、これはかつて魚雷をテストするためのプールでしたが、3階のバケツですべてを引き出すのは非常に困難です。 タスクには特別なことは何もないように見えますが、いくつかの困難が現れました。
設置作業の過程で、レベルゲージをタンクにするタスクが登場しました。 時折、オーバーフローのケースがあり、地下に8〜10トンの水があり、これはかつて魚雷をテストするためのプールでしたが、3階のバケツですべてを引き出すのは非常に困難です。 タスクには特別なことは何もないように見えますが、いくつかの困難が現れました。
条件:
- タンク容量:2から8000リットル
- タンクの地理的位置:2階(地下8メートル)
- 床の天井:木材
- 必要なレベル精度:±10リットル
- クリティカルレベルの警告
- 職場の表示
アナログオプション
プローブが極端な位置にあるオプションは、現在のレベルに関する情報が不足しているため、すぐになくなりました。 最初のアイデアは、アナログ原理でコンパレータを実装することでした。 基礎はLM3915N-1で、これは主に音響学の対数指標に使用されます。 スキーム-どこも簡単。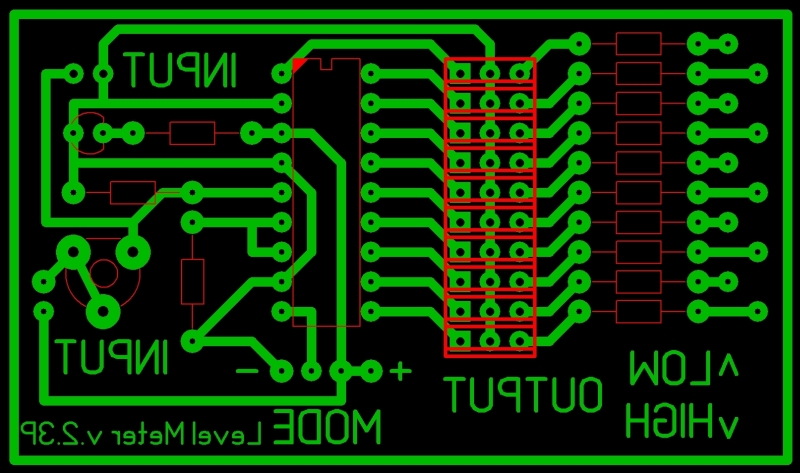
レベル出力-LEDライン上のドットまたは列。 ボードには、初期レベルを設定する分圧器の片方の肩があります。
1.5メートルの抵抗チェーンが測定要素として作られました。これは、ミクルヒの入り口の仕切りの2番目のアームでもありました。 抵抗値は、LM-kiのデータシートで必要な出力電圧が2〜5 Vで変化するように選択されました。 チェーンは、タンクに沿って目視検査するためにチューブに浸されています。 「プローブ」との通信-15メートルの2線式ワイヤ。

アイデアの原理は、抵抗器が浸水すると、抵抗器の一部がそれぞれ水で閉じられ、コンパレータの入力電圧が増加し、LED列が満たされることでした。 このアイデアの利点は、実装の速度とシンプルさです。2〜3週間後にこの軽い集団農場は撤退しました。 インジケーターのレベルは徐々に低下し始め、タンク内のレベルは正常でした。 チューニングトリマーを使用して、デザインがまったく機能しなくなるまで、彼を通常の状態に戻しました。 理由は透明であることが判明しましたが、その前に推測することはできませんでした。 抵抗器チェーンのはんだ付けは主要な電気分解にさらされ、水塩はいくつかの場所で簡単にそれをかじりました。 この不名誉の解決策は、各リンクの磁石とリードスイッチを備えたフロート、または「プローブ」リンクを閉じるホールセンサーの束だけですが、これはより集合的なファームになり、同じ弱い離散性と精度で設計の複雑さが増します。 回路は分解されています。
古い図面ボードに戻ります。
新しい実装として、コントローラー上にデバイスを作成することにしました。 私はArduinoとアナログを原則として使用しません。何かを学ぶことはできますが、すべてをゼロから行う方がより興味深いです。 私はコントローラーで少し作業しますが、最大で1年半ですので、各開発で新しいことを学ぼうとしています。これは、はるかに安価な要素(ディスプレイ、通信)でできることですが、あまり面白くありません。 また、実装とコードをあまり気にしないでください。新しいアイデアは、超音波距離計を使用して、水面までの距離を測定することです。 タンクのサイズがわかっている場合、容積を計算するのは簡単な作業です。
コンポーネント:
- ディスプレイ:128x64グラフィックNoNameとebay
- コントローラー:AT Mega16a PU
- 超音波センサー: HC-SR04 with ebay
- 通信:BT JY-MCU HC-06 V1.03とebay
- 受信機: BluetoothドングルアダプターUSB 2.0
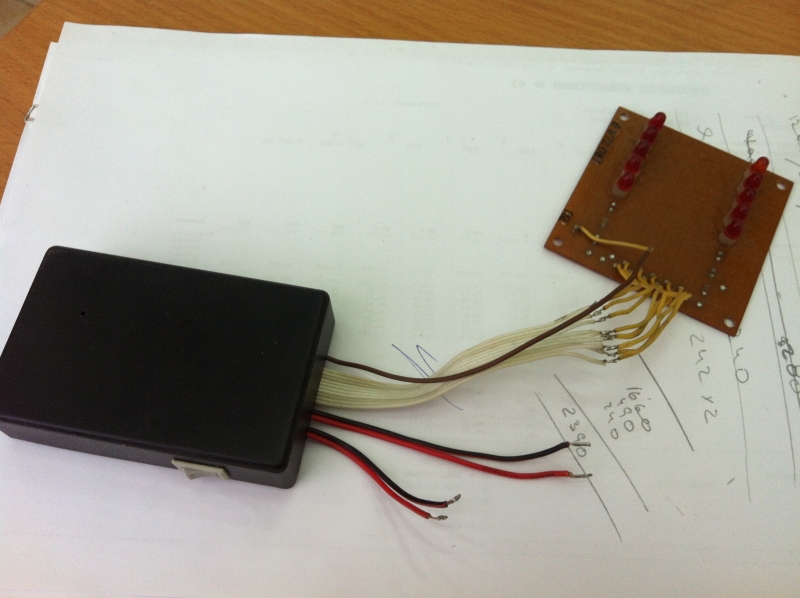
これらはすべて、タンクを覆う断熱層に埋め込まれています。ここは、タンクシースに埋め込まれたブロックの裏側の内部です。

コントローラープログラムは、Delphi 7のクライアント部分であるC(CodeVision AVR)で作成されました。
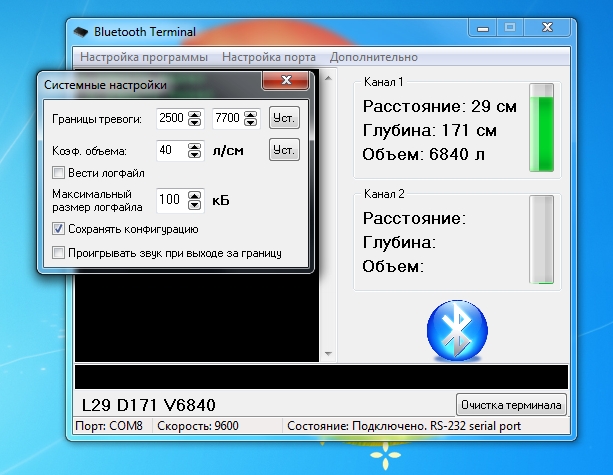
作業の本質は次のとおりです。タイマーコントローラーは、超音波センサーからのエコーパルスの持続時間を計算し、距離、次にボリュームに再カウントします。 ブルートゥース上のデータはコンピューターに転送され、タンクの充填、表面までの距離、深さのグラフィック出力があります。 これらはすべてコントローラーで計算されます。 クライアントからは、コントローラーで最大境界と最小境界が設定され、低照度の赤色または緑色のLEDが点灯すると、コンピューターのプログラムで音が出力され、境界に到達したタンクのディスプレイが点滅します。 容積係数[l / cm]も設定されているため、センサーを配置したり、異なる形状のタンクに設置することもできます。 すべてのパラメーターはEPPROMに保存されます。 システムには2つのチャンネルがあり、データは2つのタンクから同時に送信されます。 撮影時には、1つの戦車が下げられ、目が遅くなりすぎないようにこのチャンネルをオフにしました。
当初、アイデアは有線でデータを送信することでしたが、天井から15メートルのワイヤーを敷くことは問題でした。 空路では、距離は約8メートルでした。 受信機は、鉱山の近くの特別なキャビネットにあるコンピューター内にあります。設置の制御システムは、実験用タンクが間隔を空けて設置されています。1人のオペレーターが鉱山とパイプラインの隣にあり、2番目は取り外されています。 センサー自体は、タンク内の直径100 mmのプラスチックパイプに取り付けられているため、水がタンクに排水されたときに、水しぶきがなく、レベルがスムーズに変化し、万一に備えて表面に波や波紋がありません。 これのプラスは、超音波センサーの放射パターンが狭くなったことです。 残念ながら、設置場所の写真はありません。タンクの蓋はすでに40個の小さなボルトにねじ込まれ、重量が測定されていません。自分で動かさず、修理を開始しました。
断熱材のディスプレイのタイプ(1チャネル):

グローバルに、地下タンクのレベル制御の問題を解決することに加えて、私は少し開発し、Bluetoothモジュールに触れ、グラフィック用のライブラリを追加し、超音波センサーに触れ、進歩は常に良好です。
すべてをシリコンまたは化合物で満たすことができますが、60-70%の湿度ではこれまで酸化されていません。中国は超音波センサー自体にIP68を書いています。
そのようなシステムが判明し、それが適切に機能し、誰かに役立つ可能性があり、井戸や他の手の届かない場所のコテージで非常に適用可能です。 主なものはアイデアです。
彼は、MKファームウェア、PROTEUSファイル、Delphi 7の生ファイル、コンパイルされた実行可能ファイル、すべてのライブラリ、つまりプロジェクトフォルダー全体を自発的にマージしました。 [アーカイブパスワード:idkfa]
AVR LevelMeterグラフィックLCD 2ch BLUETOOTH.rar [2.6 Mb]