ESAとNASAは、宇宙飛行士が宇宙ステーション、惑星または小惑星の周りの軌道複合体からロボットを制御できるようにする通信プロトコルをテストしました。 ISSの宇宙飛行士によるテストは来週に予定されています。
先週、ボルダー大学の宇宙ステーションユーザーセンターから、米国は国際宇宙ステーションのNASAラップトップにチームを送り、ドイツのダルムシュタットにある欧州宇宙機関(ESA)のESOCオペレーションセンターでMocup Roverを制御するスクリプトを実行しました。 ローバーは前進して写真を撮る命令を与えられ、彼はそれを計画通りに行った。
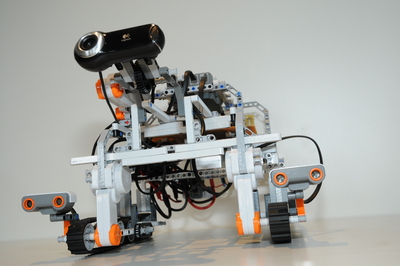
Mocup画像1119Kbを拡大します 。 出典:ESA
Mocupについて
Meteronプロジェクト(多目的エンドツーエンドロボットオペレーションネットワーク)-多目的エンドツーエンドロボット操作ネットワーク-宇宙飛行士は、ドイツのダルムシュタットにあるESAオペレーションセンターからMocupロボットの制御をテストします。
Mocupは、Meteron Operations and Communications Prototypeの頭字語です。
Mocupは、Meteron Operations and Communications Prototypeの頭字語です。
Mocupは、Meteron ESAのテストローバーの1つです。これは、月、火星、その他の天体への将来のミッションのためのイニシアチブです。

ビッグプレビューMocup 1176Kb
宇宙探査は、人々をこれらの土地に送る前に、未知の惑星で水を探索するために研究ロボットを送る経路をたどる可能性があります。
遠方の惑星の場合、これらのロボットは、惑星の軌道上の宇宙船からの宇宙飛行士によって制御されることができます。
「これらのテストでは、地球が月または火星であるふりをします」と、Meteron's Ground Projectの運用マネージャーであるKim Nergaard氏は言います。
信頼できる接続
このパスに沿ってチームを送信することは、見かけほど簡単ではありません。 地球または地表のデバイスの間に直接見通し線がない場合、リンクが切断される場合があります。
理想的な条件に満たない場合でも適切な動作を保証するシステムを開発する必要があります。 科学者は、信頼できる通信のための「インターネット空間」の一形態として破壊的耐性ネットワークを開発しました。
ネットワークプロトコルは、信号が失われた場合にコマンドを記憶し、通信が回復するとすぐにコマンドを送信します。
最初の通信テストが完了したので、ラップトップは、ベルギーのオペレーションセンターからESAコントロールセンターにISSに転送されます。

。 ビッグプレビュー1774Kb
スニータウィリアムズのEVA
(NASAの宇宙飛行士スニタウィリアムズ、32人の遠征飛行士、ミッションでの3回目の宇宙遊泳中。2012年9月5日に6時間28分間続いた宇宙遊泳中に、スニタウィリアムズと星出昭彦宇宙飛行士が修理を完了しました。 ISS MBSU冗長電源システムスイッチングユニットカナダアーム2ロボットアームにもカメラが設置され、右の背景にはESAラボコロンバスESAラボがあります。
(バックアップユニットをインストールする最初の試みが2本のボルトの1つを突き刺し、宇宙飛行士が金属ピンと歯ブラシで作られた即興ツールのセットを使用してボルトと穴を掃除し、バックアップユニットを設置したことは注目に値します-Cholgaa)
(バックアップユニットをインストールする最初の試みが2本のボルトの1つを突き刺し、宇宙飛行士が金属ピンと歯ブラシで作られた即興ツールのセットを使用してボルトと穴を掃除し、バックアップユニットを設置したことは注目に値します-Cholgaa)
来週、NASAの宇宙飛行士スニータウィリアムズが宇宙からMocupのリアルタイムローバーを最初に飛ばします。
彼女は、ローバー自体から直接彼女に向けられた入り口を使用します。 ESOCは、後続の分析のためにプロセスのみを監視します。
「これは、火星への将来の有人ミッションに必要なシステムをテストするための最初のステップです」と、キムは言います。 「接続が機能することを確認したらすぐに、アイロンと操作のテストを開始します。」