人間は、自分が持っているものと同じまたは類似したロボット用の手足を作成することが一般的です。 研究者によって「触手」と呼ばれる新しいマニピュレーターを作成するとき、開発者は、水の要素に住む別の生き物の形で

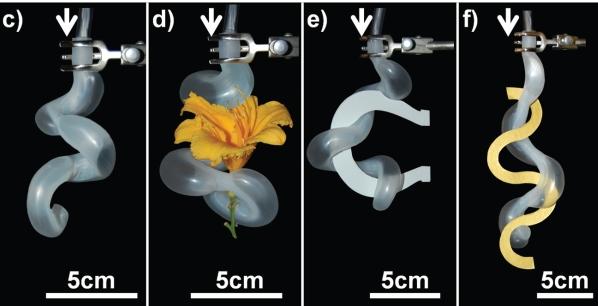
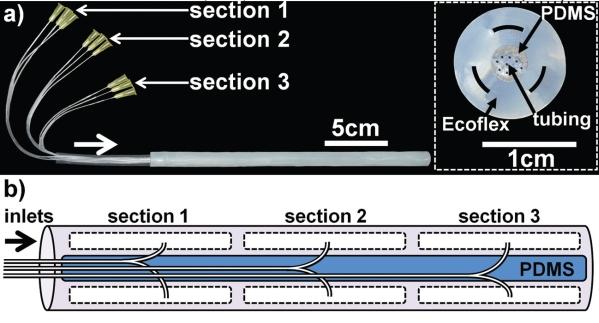
触手内部の多数のチャンネルのおかげで、科学者は空気圧マニピュレーターの以前の設計で行われていたように、1次元ではなく3次元で曲げることができるようになりました。 材料として、安価なエラストマーが使用され、3Dプリンターで以前に印刷されたフォームに注がれました。 ポリマーが冷却された後、中央コアが取り除かれ、その場所に別のタイプのPDMSポリマーが充填され、構造全体に相対的な剛性が与えられます。 その後、周辺機器プロファイルが取得されます。 その結果、金型から取り外した後、PDMSで満たされた中央チャネルと平行に配置された3つの空気圧チャネルを持つエラストマー触手が表示されます。
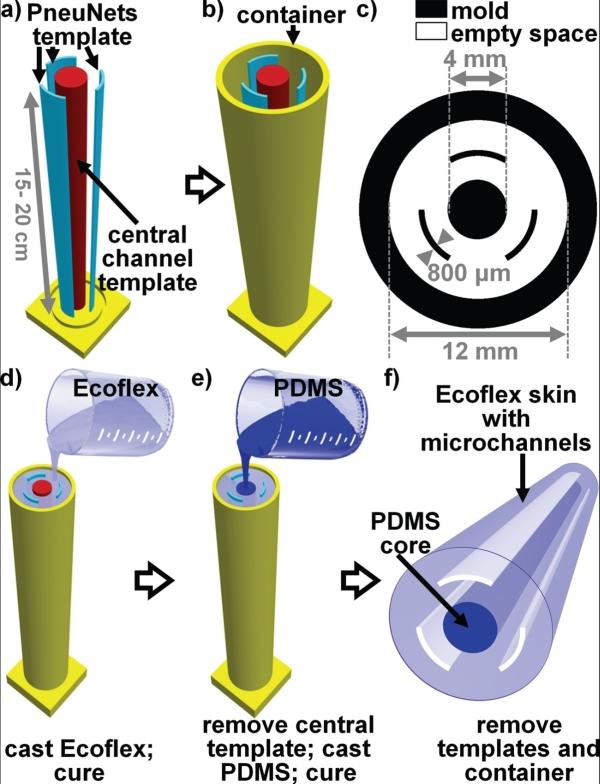
この技術の利点は、さまざまな数と構成のチャネルを作成できることです。これにより、技術を改善するだけでなく、触手に追加の機能を与え、可能なアプリケーションを拡大するための幅広い分野が残ります。
たとえば、チームの有望な発見の中には、触手のテントの端にカメラを配置することがあります。これにより、小さな物体をより正確に見ることができます。また、(実験的な順序で)タコのように、吸引カップの空洞の圧力の低下により物体をしっかりと捕捉できる空気吸引カップさえも見ることができます。
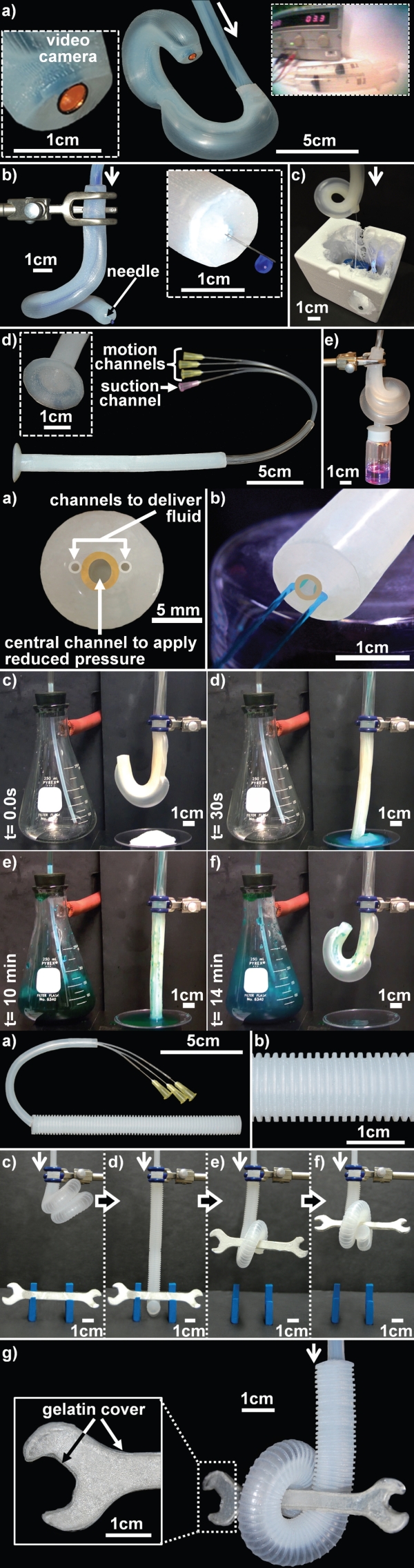
要するに、この技術は、それを適用できる研究やアイデアの広い分野を残しています。 たとえば、特定のロボットの四肢の個々の指のような触手を使用すると、限られた自由度で、通常よりもはるかに多くの可動性と機能が得られます。 触手は完全な空気圧であり、頑丈なフレームがないため、収縮させてロボットの内部コンパートメントに移すことができ、他のツールを配置するために使用できるスペースを節約できます。
この技術のより詳細な研究については、 こちらの PDFファイル(5.13mb)をご覧ください