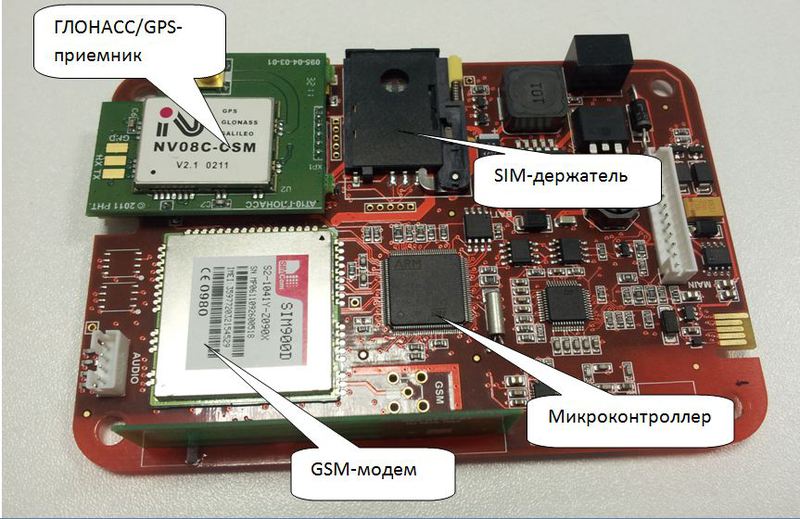
典型的なGPS / GSM搭載ユニットのレイアウト
実際、消費者用GPSナビゲーション機器の積極的な開発は、米国大統領令により民間のGPS受信機の精度の粗大化が廃止され、通常の「家庭用」GPS受信機で10〜15 mの誤差で物体の位置を特定することが可能になったときに始まりました。 Trimble、Tyco、uBloxなどの電子大手は、すぐに電子部品市場に参入します。
当時、これらは比較的かさばるデバイスであり、最初のGPSモジュールはマッチボックスのサイズでした(以下、ナビゲーションレシーバーは電子コンポーネント、ナビゲーションを担当するモジュールを指し、GPSナビゲーターやGPSトラッカーなどの完成したデバイスではありません) 。 比較のために、AutoTrackerブロックで使用され、システムオンチップ(SoC)を表す最新のGPSチップのサイズは約0.25cm²で、さらに小さくなっています。 さらに、彼は数倍の感度とチャンネルを持っています。 実際、2007年まで、ロシアには衛星電子部品市場はありませんでした;選択は非常に乏しかったです。 たとえば、1000個のGPSモジュールのバッチの公式ディストリビューターによる配達時間は、6か月以上になる可能性があります。 ロシア市場に参入した最初の企業の1つは、アメリカの企業Trimbleでした。 彼らはすぐに、電子部品から完成したシステムまで、多くの興味深い技術的ソリューションを提供しました。 さらに、彼らの製品は低価格で高品質でした。 これが、Trimble GPSレシーバーがAutoTracker航空機搭載ユニットの最初のモデルに含まれていた理由です。

2005年モデルの12チャネルTrimble 46240-25 GPSレシーバーの寸法は26 * 26 * 6 mmであり、これは当時としては悪くありません。 しかし、GPSチップの最新の開発は、それよりも500〜700倍小さいです!
しかし、電子部品の市場は急速に発展しており、2007年以降、中国メーカーを含む新しいプレーヤーがロシアに来ました。 競争は著しく激化し、技術と価格の競争が始まり、その結果、2005-2006年の受信機は巨人のように見えます。

56チャンネルGPS / GLONASSモジュールの最新モデルは、あらゆるモバイルデバイスに簡単に統合できます。
しかし、レシーバーの質量と寸法に加えて、すべてのパフォーマンス特性が大幅に改善されました。 特に、チャネルの数。 最新の受信機には50〜60チャンネルが含まれていますが、2006年には12チャンネルでした。 これは何に影響しますか? 2つの座標(経度と緯度)を特定するには、GPS受信機が3つの衛星からの信号を受信し、4つの衛星から3つの座標(経度、緯度と高度)を特定する必要があります。 ただし、信頼性の高い動作を実現するには、受信機が多数の衛星と連携できる必要があります。 たとえば、ある衛星から信号が失われた場合、GPS受信機は別の利用可能なチャネルを使用できます。 ほとんどの場合、通常の動作には8チャンネルの受信機で十分です。 チャネル数がさらに増加すると、GPSは1つの衛星(メインおよび反射)から複数の信号を受信する機会があります。 多数のチャネルを使用すると、受信機の全体的な感度とノイズ耐性が向上し、最終的に精度が向上し、座標を決定する時間が短縮されます。
ナビゲーションレシーバーのもう1つの非常に重要なパラメーターは感度です。 それが高ければ高いほど、衛星からの信号が弱く受信できるほど、受信機が座標を正確に決定できる可能性が高くなります。 GPS受信機の感度は、特に、衛星から受信した信号の処理と分析の機能によって決まります。 受信信号の主なパラメーターはレンジファインダー遅延であり、相関器のセットを使用して計算できます。 高感度を実現するには、GPS受信機が十分な数の信号遅延を同時に分析する必要があります。 多数の相関器が存在すると、受信機のパフォーマンスが大幅に向上し、感度が向上し、最初の位置決定までの時間が短縮されます(Time To First Fix、TTFF)。 そのため、2008年に登場したGPSモジュール(主にSiRF Star IIIチップ上)では、並列相関器の総数は200,000であり、これによりモジュールは–159 dBmの感度を達成できます。 良好な受信状態では、これは信号キャプチャがほぼ瞬時に発生することを意味します。 その瞬間まで、GPS受信機の相関器の一般的な数は8〜1万でした(たとえば、uBlox ANTARIS 4)。 コンポーネントを選択し、AutoTrackerのオンボード機器を開発するときは、これらすべてのパラメーターを考慮する必要があります。
別のトピックはGLONASS受信機です。 彼らの積極的な生産は比較的最近始まりました。 これは政治的要因などにより促進されました。2009年2月18日、連邦航海法に関する法律が施行され、後に公共交通機関、乗客、危険物などの輸送にGLONASSのサポートを義務付ける多数の法律が施行されました。 。 このような強制措置により、GLONASS民生用ナビゲーション機器の開発が促進されました。 最初は、受信機の開発者やメーカーからの申し出はまったくありませんでした。 ロシアの受信機のこれらの単一および小規模のコピーは、いかなる批判にも耐えず、GPS機器と性能を競うことができませんでした。 同時に、彼らは素晴らしいお金がかかり、その価値は250から300ドルに達しました。

最初のGLONASSモジュールの1つ
そのようなデバイスを購入したい人はほとんどいませんでしたが、妥協案が見つかりました。 オンボードユニットのAutoTrackerは標準のGPSでも変更されず、緊急の場合には外部GLONASSモジュールが接続されていました。 これにより、自動車のブロックを完全に交換するのではなく、一種の近代化を実施することができました。
その後、約1年後、ロシアの企業は、多かれ少なかれ許容できる品質と特性のGLONASS受信機の小さなバッチの生産を開始しました。 それはまだGPSからは程遠いものでしたが、2005年の同じTrimbleの寸法をreとさせる、かなりうまく機能しました。 さらに、それらはすべて2つのシステム(GLONASS / GPS)でした(そして、そうでした)。これにより、代替システムからの信号を使用してデータを絞り込むことができました。

KB NAVIS製GLONASSモジュールを搭載したチップ搭載ユニットAutoTracker AT-10
この時点での価格も大幅に低下しています。 しかし、約1年が経過し、GLONASS受信機の海外開発が登場しました。 コンパクトで、技術的に高度で、特性と価格がGPSに非常に近いものでした。 重要な瞬間は、GLONASSをサポートしたiPhone 4Sスマートフォンの登場です。 おそらくこれは、国際的な電子企業がGLONASS機器を製造するための推進力となったのでしょう。 現在、ナビゲーションレシーバーのGLONASSバージョンは、Trimble、uBlox、SiRF、Telitなど、ほとんどの主要な外国メーカーから入手できます。

16 * 12.2 * 2.4 mmの寸法のGLONASS / GPS / Gallileo Telitモジュールは、従来のGPSモジュールに代わる完全に許容可能な代替品です
そして、私たちは引き続きこの市場を綿密に監視し、定期的に新しいレシーバーのサンプルを分析およびテストして、空中ユニットで最高の開発を実施します。 以下の投稿のいずれかで、このようなテストの方法論と結果を紹介します。