私の場合、4つのドライブを使用することになっていた。 このプロジェクトでは、小さなボードを作成しました。


ボード自体はシンプルです-Atmega16A-AUマイクロコントローラー、コントローラー用のスタビライザー、ドライブ用の2つのスタビライザー、およびドライブを接続するためのPLSコネクター。 私の場合、ドライブにはほとんど負荷がありませんでした(サーボは紙の部品で移動していました)。そのため、ドライブには小さなラジエーターに1つのリニアスタビライザーで十分でした。
ドライブ制御については、 alex-exeとdi haltに関する2つの最も興味深い記事を見つけました。 ただし、どちらの方法にも欠点があります。 最初の場合:頻繁に割り込みを発生させる必要があるため、メインループの実行がほとんど遅くならず、高い位置決め精度を得ることができません。 実装中、ドライブは非常に強く収縮し、インストールの精度は約1度です。 実際に、ここにビデオがあります:
DI HALTメソッドは、フォーメーションを昇順で想定しています。つまり、シグナルを追加で計算する必要があります。
この点で、これらの困難の両方を回避する別の方法を提案したいと思います。
サーボドライブの制御原理は単純です。0.8〜2.3ミリ秒のパルスを15〜20ミリ秒の周期で送信する必要があります。 パルス幅は、サーボの位置を決定します。 提案された方法は、図に示すように、MKの脚でのパルスの形成を次々に伴います。
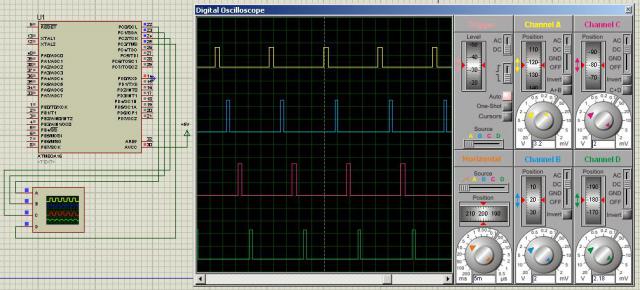
このメソッドを実装するには、1つのタイマーで十分です。 マイクロ秒ごとに増加するようにタイマーを設定します。 信号周期全体は18000μsで、1つのパルスの形成時間は4500μsです。 4つのサーバーを制御するときのタイマー割り込みは、8回呼び出されます。 これは、メソッドの制限を意味します。1つのタイマーが8台を超えるドライブをハングさせることは機能しません(20msで、2.3msの持続時間で最大8個のパルスを生成できます)。
変数angle1-angle4は、メインプログラムサイクルで変化する正規化単位の角度です。 角度を0から180度に変更するには、800から2200に変更する必要があります。すべての制御は割り込みハンドラーで行われます。 タイマーが最初にトリガーされると、最初のドライブを担当するユニットが1に設定されます。 このドライブの角度値は、すぐにOCR1Aレジスタに書き込まれます。 次にトリガーされると、レッグは0に設定され、1つのドライブの制御期間の終了までに残ったサイクル数がOCR1Aレジスタに書き込まれます(4500に設定されています)。 その後、2番目のドライブを担当する脚で同じことが行われます。 したがって、1本の足で4.5msごとに、必要な持続時間のインパルスが表示され、最大1µsの精度で! つまり、角度の設定の精度は10分未満であり、ドライブ自体の特性によって制限されます。 したがって、コード自体:
ISR(TIMER1_COMPA_vect) { if (takt == 0) { PORTC |= 0b00000001; OCR1A = angle1; } if (takt == 1) { PORTC = PORTC & 0b11111110; OCR1A = cycle - angle1; } if (takt == 2) { PORTC |= 0b00000010; OCR1A = angle2; } if (takt == 3) { PORTC = PORTC & 0b11111101; OCR1A = cycle - angle2; } if (takt == 4) { PORTC |= 0b00000100; OCR1A = angle3; } if (takt == 5) { PORTC = PORTC & 0b11111011; OCR1A = cycle - angle3; } if (takt == 6) { PORTC |= 0b00001000; OCR1A = angle4; } if (takt == 7) { PORTC = PORTC & 0b11110111; OCR1A = cycle - angle4; } takt = takt + 1; if (takt == 9) takt = 0; }
プログラム全体のテキストは提供しません。メインサイクルのコーナーは、少なくともUARTに従って、少なくともADCを使用して、任意の方法で形成できます。 実際に、どこで、どこで、どのくらいの長さで立つかなどを手で決めました。 トグルスイッチもありました。 オンの位置では、サーボはプログラムに従って移動し、オフにすると元の位置に戻ります。 必要に応じて、すべてのプロジェクトソースをメールに送信できます。
4つのドライブのビデオを次に示します。
左下隅のドライブに注意してください-動きはほとんど目立ちません! このドライブはクレーンブームを制御します。 ドライブ自体についてさらに説明します。 私の手には4つの異なるドライブがありました。2つのアナログと2つのデジタルです。 両方のドライブが動作しているにもかかわらず、両方のアナログドライブが正常に数分間しか正常に動作せず、ランダムにひきつり始めたり、極端な位置で固定したりすることは注目に値します。 デジタルドライブは、数時間(または数日)にわたってすべてを明確かつ安定して実行しました。 お客様から苦情を聞いたことはありません。 クレーンブームには、ハイテクアクチュエータを使用しました。これは、最小ステップで位置を変更しました。
そして最後に-レイアウトの写真。 残念ながら、動画をアップロードできません。

UPD:
主な記事は現在ここに保存されています 。