
ヘリコプターの簡単な構造に関するrcexplorerの記事に触発され( ここに私の翻訳があります )、3つのモーターを備えた小さな飛行ユニットを作りました。
以前の記事で詳細に説明されているように 、いくつかのことについては説明しません。
フレーム
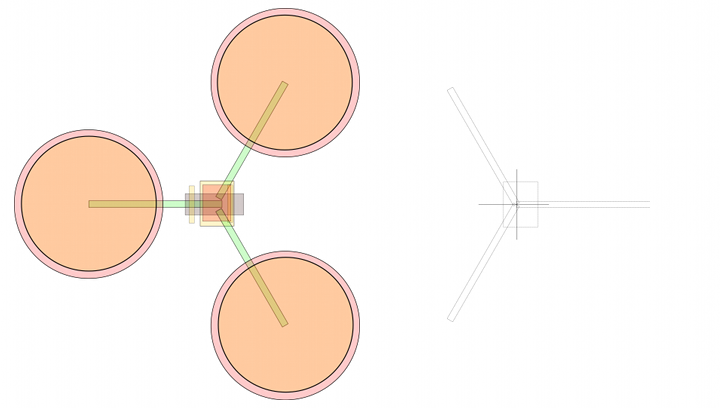
フレームは非常にシンプルです。 ファイバーグラスまたは他の同様の薄くて耐久性のある材料を取り、希望するサイズの中央部分の2つの部分を切り取り、両面テープで結果の部分を固定し、ビームを取り付けるために6つの穴を開けます:ビームごとに2つの穴、および120度の角度で各ビーム この場合、モーターの軸から光線の接続の中心までの距離を事前に計算することをお勧めします。そうしないと、フライトコントローラーの将来の構成に問題が生じる可能性があります。
グラスファイバーの入手先がわからない場合は、taydaelectronics.comでいつでも注文できます。6x 6インチの正方形は1ドルを少し上回りますが、パッケージの最小重量に合うように少なくとも5個購入する必要があります。

次に、軽量で耐久性のあるアルミニウムプロファイルが必要です。 私は買い物に行くのが面倒で、時間がなくなっていたので、GoodLuckBuyのウェブサイトから長さ25 cmの4本の光線を注文しました 。
私は通常、インクスケープの場所と寸法を把握し、アウトラインを残して印刷し、ワークに貼り付けます。
建設の時点では、フォイルグラスファイバーの小さな部分しかなかったので、65 x 85 mmの長方形が2つありました。 その後、バッテリーとカメラを備えたサスペンションを取り付けるために、さらに4つの穴が開けられました。

その結果、 プラスチック製のボルトとナットで固定されたこのようなフレームが得られ、さらにひどく折りたたまれません(後で美しくなりませんが、まだコンパクトです)
スイベル機構
トリコプターの最も困難で問題のある場所は、後部モーターの回転機構です。これは、回転を補正するだけでなく回転する役割も果たします。 それは彼が長い間「3ルーブル」を作るのをためらいましたが、経済と輸送のためにフレームを簡単に折りたたむ能力を考慮して本当に欲しかったからです。 デビッドの記事のように、私はこれらのものを取りました:

しかし、サーボにエラーがありました(少し節約したかったのですが、2回購入しなければなりませんでした)ため、メカニズムの最初のバージョンはかなり大きくて重いことがわかりました。

したがって、 Davidの記事に示されているサーボBMS-385DMAXをすぐに使用することをお勧めします。
スイベルメカニズムを保持しているスクリードは飛ばないので、プロファイルをわずかに曲げてください。 また、メカニズムの白いブロックのくぼみに小さな木片をねじ込むことと、両面テープまたは接着剤を使用することをお勧めします。

スピードコントローラー、モーター、プロペラ
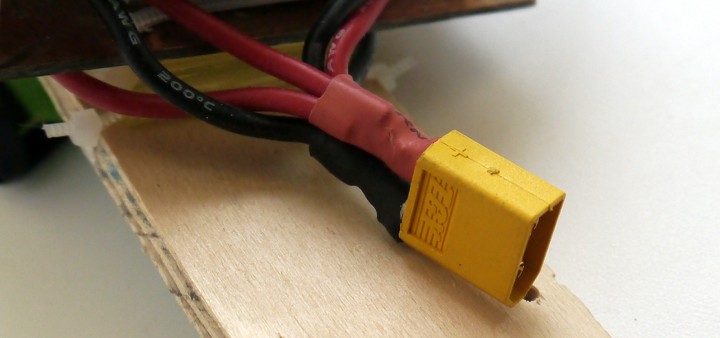
伝統的に(そしてそれは自宅で入手可能だった) HobbyKing BlueSeries 30Aスピードコントローラーと20-22Lモーター。 速度コントローラーは、便利に電源コネクタを引き抜くために、そしてバッテリーにさえ届くために電源線を長くしなければなりませんでした。 そしてもちろん、スピードコントローラーの設定をわずかに変更し、ブレーキをオンにして、タイミングをHighに上げ、スムーズな加速を削除する必要があります(スピードコントローラーの異なるパラメーターには異なるパラメーターがありますが、一般的には、すべてがより速くなるようにすべてを設定します)。
プロペラは 、モーターの回転に応じて多方向に移動します:左前が時計回りに回転し、右前が反時計回りに回転し、設定に応じて後部が回転します(回転方向を変更するには、速度コントローラーからモーターまでの2本のワイヤーを交換するだけで十分です)。
ジンバル、バッテリー、ラック
この場合のジンバルは、バッテリーの幅に合わせてカットされた合板です。 マジックテープは合板(バッテリー上の他の部分)に接着され、同時に追加のマジックテープがねじ込まれ、バッテリーを確実に固定します。

シリコンチューブはスクリードを介してサスペンションに取り付けられ、他のシリコンチューブはスクリードのフレームに取り付けられ、カメラの振動を減衰させるために互いに固定されます。

ヘリコプターがバッテリーに着陸しないように(非常に危険です)、PCBの残骸から3つの小さな長方形を切り取り、それらに穴を開けた後、タイでビームに固定します。
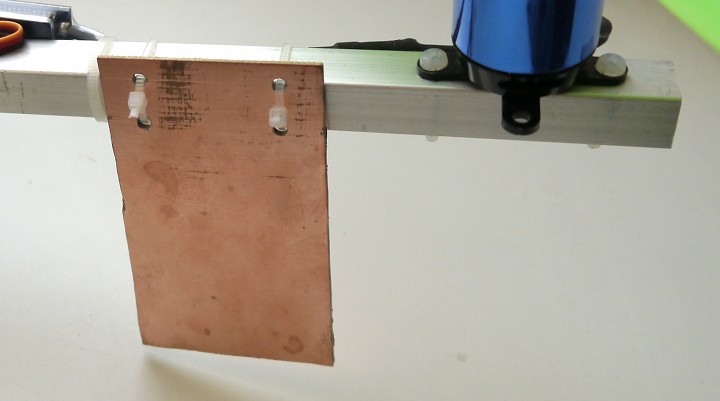
比較的ハードに着地すると、スクリードは落下し、落下のエネルギーの大部分を吸収するため、バッテリーは影響を受けません(アスファルトの7メートルからの落下でテスト)。
Crius Liteフライトコントローラー
少し前まで、atmega328pと一連のセンサーを備えた非常に安価なフライトコントローラーがgoodluckbuyのWebサイトに登場しました。Lite バージョンではジャイロスコープ+加速度計、 Standartバージョンでは追加の気圧計とコンパスです。 Liteバージョンを購入した理由は2つあります:価格(購入時、差は2倍)と他のセンサーの無感覚(コースはコンパスなしで完全に保持され、bmp085センサーでジャンプ+ -2メートルで高さを保持することは私を刺激しません)。

ほとんどすべての中国人が接触を閉じて、単にコントローラーを殺すことができる多くの導電性の汚れを残したので、購入後、私はすべての余分を取り出してアルコールでハンカチをすすぐことをお勧めします。

発泡粘着テープを使用して、ボードと関連機器(レシーバー)をフレームに固定します。 非常にしっかりと保持し、同時に振動を少し除去します。 (アンテナを取り付けないのは、遠くに飛ぶ場合のみです)。
ヘリコプターの重量は約800グラム、2.2Ahのバッテリーとカメラで最大200グラムの飛行時間は約10分ですが、パワーリザーブは約40〜50%です。
これにより、鉄の部分が終了し、ソフトウェアでゲームが開始されます。
ソフトウェア
ボードの最初の接続後、アップロードされたファームウェアは非常に古く、センサー軸が混ざっていても、つまり この上を飛ぶ必要さえありません。 したがって、 Arduino IDEと新しいファームウェアをダウンロードします (devをダウンロードしないでください!)、 またはさらに良いことに、 多くの改良を加えたmahowikからのポートです。
カスタマイズ
Arduino IDEからスケッチファームウェアを開きます。 構成全体はconfig.hファイルに記述されています(ほとんどのパラメーターと設定の詳細については、 こちらをご覧ください 。この記事では、多くの小さなことは省略されています)。 トリコプターの場合、フレームタイプ#define TRI、センサーボードタイプ#define CRIUS_LITE、およびジャイロスコープ用フィルター#define ITG3200_LPF_42HZを設定します。 そして今、Arduino IDEの設定で、328p arduinoを選択し、結果のスケッチを記入します。
システムのMultiWiiConfを起動します。

私たちの回転機構は、重い負荷の下で燃焼する能力を備えたサーボを使用しているため、サーボ偏差の限界を見つけて設定することをお勧めします。 これを行うには、コントロールパネルのYAWスティックを使用して、サーボを左右に回し、極端な位置にあるサーボの最大値と最小値を覚えてから、これらの値をconfig.hファイルに入力します
/* you can change the tricopter servo travel here */ #define TRI_YAW_CONSTRAINT_MIN 1340 #define TRI_YAW_CONSTRAINT_MAX 1855
そして、スケッチをコントローラーにリロードします。 これで離陸を試みることができますが、ヘリコプターが回転することに注意してください。そのため、離陸および飛行中に回転がないようにリモコンのYAWチャンネルをトリミングしてから、MultiWiiConfに戻り、SERVOフィールドでこの値を見て、それを変更します
#define TRI_YAW_MIDDLE 1630 // tail servo center pos. - use this for initial trim; later trim midpoint via LCD
注意! 新しいファームウェア(2.0以降)では、そのようなトリミングはLCDスクリーンまたはターミナルを介して行われます。どちらも持っていない場合は、Output.inoのコードをわずかに変更する必要があります。
#ifdef TRI motor[0] = PIDMIX( 0,+4/3, 0); //REAR motor[1] = PIDMIX(-1,-2/3, 0); //RIGHT motor[2] = PIDMIX(+1,-2/3, 0); //LEFT servo[5] = constrain(TRI_YAW_MIDDLE + YAW_DIRECTION * axisPID[YAW], TRI_YAW_CONSTRAINT_MIN, TRI_YAW_CONSTRAINT_MAX); //REAR #endif
私のトリコプター用の既成の構成ファイルnekaka.com/d/sgNj8AXp2Y-誰かが役に立つかもしれません。
これで、PIDの設定、 カメラジンバルコントロールの追加などができます 。 、位置を保持して帰宅する機能を備えたGPSサポートを追加します。
おわりに
実際、構築して設定するとき、理解できず興味深いものがたくさんあります。 しかし、航空機のモデリングに従事するのは中毒性があり、ヘリコプターに従事するのは中毒性があります。特にプログラマーであり、オープンソースプロジェクトのコードを改善したい場合は中毒性があります。
最後に、最近の飛行のビデオをご覧ください。ヘリコプターはひどく損傷を受けましたが、現場ですぐに修理されました(カプラーとプラスチックボルトのおかげです)。
撮影は2台のデバイスから実行されました。GoProカメラを搭載したクアドロコプターとオンボードFPVカメラを搭載した私のトリコプターで、その写真は古いminiDVカメラで地上に記録されました。
ps:質問がある場合は、質問してください。可能な限り記事を更新します。