Inhaos RF-2400PモジュールはBK2421チップをベースにしており、Nordic NRF24L01が組み込まれているようです。 したがって、それらを使用するには、 Nordicで作成されたMirfライブラリを使用できます。
私が解決した問題は、複数のモジュール間のデータ交換を整理することでした。そのため、Mirfで使用され、一対のモジュール間の相互作用に基づいた作業のロジックはあまり便利ではありませんでした。 代わりに、複数のデバイスで同時に使用される無線インターフェイスを介して、仮想メモリが編成され、同期されました。 結果は 、arduinoのようなライブラリです。

Inhaosは、RF-2400Pモジュールに加えて、同じBK2421上に構築された非常に優れたUSB「ホイッスル」 RF- 2410Uを提供しますが、すでにC8051F321マイクロコントローラーと連携しています。
私の意見では、それは「スマートホーム」などのシステムの非常に手頃な価格で興味深いソリューションであることがわかりました。価格のおかげで電球や「ホイッスル」の形でコンパクトな制御インターフェースに統合できる安価な無線モジュールの束です。配線とシリアルポートの可用性。
RF-2400デモ
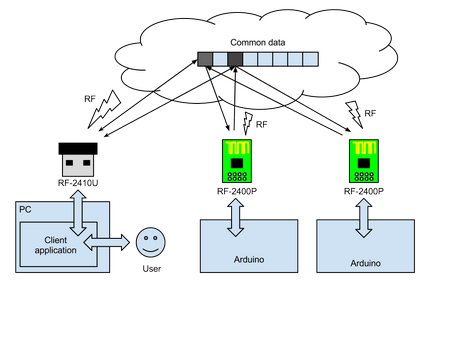
これらのデバイスを理解し、それらの共同作業を説明するプロセスを簡素化するために、次のデモをご覧ください。
鉄
- クライアントデバイス-Arduino + RF-2400P
- サーバーデバイス-Arduino + RF-2400P
- オブザーバー-Windows PC + RF-2410U
原則として、(1)または(3)なしで実行できます。
ソフトウェア
- クライアントおよびサーバーパーツ用のRFSyncライブラリとarduinoスクリプト。
- RF-2410Uのファームウェアとそのドライバー。
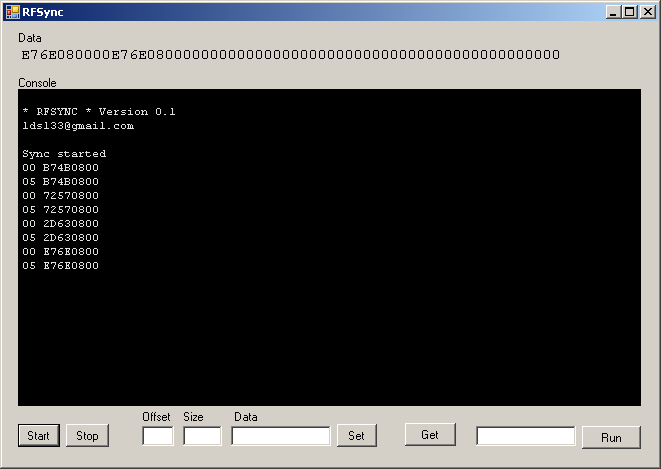
- WindowsクライアントアプリケーションRF-2410U。
作業ロジック
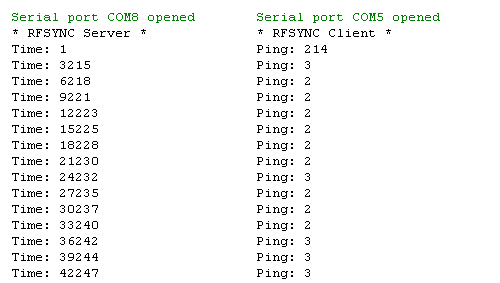
- クライアントardunボードでは、現在の時刻が同期されたアレイのアドレス0に書き込まれます。
- サーバーボードでは、同期後、アドレス0で読み取られたデータがアドレス5で複製されます。
- 同期が完了すると、アドレス5の値がクライアントボードで読み取られ、同期に費やされた時間が計算されます。
- このすべての
サーカス同期プロセスは、クライアントアプリケーションを使用して接続されたRF-2410Uモジュールを備えたWindowsマシンで観察されます。
打ち上げ
1.次のように、RF-2400PモジュールをArduinoボードに接続します。
| モジュール | Arduino |
|---|---|
| 味iso | 12 |
| MOSI | 11 |
| SCK | 13 |
| CE | 8 |
| CSN | 7 |
| 3.3 V | 3.3 V |
| GND | GND |
2. ライブラリコードをarduinoフォルダーにコピーし、 クライアントスクリプトとサーバースクリプトをフラッシュします 。
3.シリアルインターフェイスを介したデータ交換を監視します。
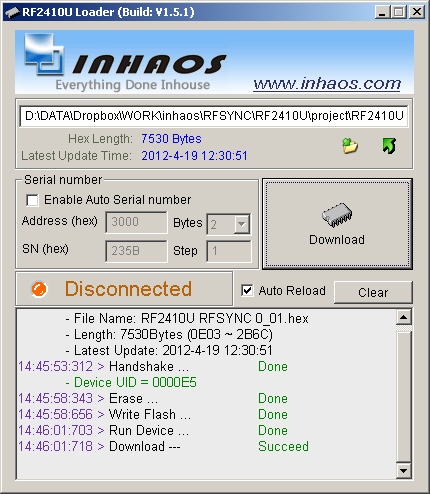
4. ファームウェアをRF-2410Uにダウンロードします 。
- モジュールがコンピューターに接続されていないことを確認してください
- ファームウェアアプリケーションを実行します 。
- ファームウェアを選択し、「ダウンロード」をクリックします
- RF-2410UモジュールをUSBポートに挿入します
- 「ダウンロード成功」というメッセージを待ちます
5.接続すると、RF-2410Uはドライバーを要求し、ドライバーに渡します 。
6. クライアントアプリケーションをダウンロードし、スタートボタンを押して、リアルタイムで同期プロセスを観察します。