カット写真の下の注意。

このデバイスについて簡単に繰り返します。 開発者のアイデアによれば、ホイールを備えた特定のデザインが採用され、その上にネットブックが配置されます。 ネットブックは、USBワイヤを介してカートのマイクロコントローラーに接続されており、Arduino(このアイデアの主な機能)で動作する任意のプログラムから制御できます。 カートは、デスクトップコンピューターまたはAndroidアプリケーションを介して、オペレーターによってリモートで制御されます。 作業時には、内蔵のネットブックカメラが使用されます。
それはトロリー自体の注文から始まりました。 実際、これらのデバイスを製造している会社はカナダのバンクーバーにあるため、そこからパッケージを配送すること自体が長期的なビジネスです。 まず、 xaxxon.comに登録して注文する必要がありました。 注文時(および執筆時点)のトロリーのコストは269.99ドルで、ロシアへの配送コストはさらに85.32ドルでした。

注文後、Colin Adamsonから連絡があり、注文と支払いの詳細を明確にしました。 支払いは2つの方法で可能です。クレジットカードを使用して会社のウェブサイトを介して、またはPayPalを介して(Colinは会社のPayPalページへの直接リンクを発行しました)。
支払い後、私は彼らが新しいバッチを集めるのに約1ヶ月半待たなければなりませんでした。 彼らはカナダのいくつかの工場と協力して、トロリー用のケースとボードを製造しています。 そのため、3月11日(ただし、長い間待っていたが、カート用のソフトウェアを作成するプロセスによって明るくなった)、注文が送信されたことを知らせる通知がメールで届きました。 貧しいコリン、この1か月半にわたって、ボードのさまざまな側面、ファームウェアなどについて質問して彼を拷問しました。
幸いなことに、手紙には小包の追跡番号があり、バンクーバーとレドモンド、モスクワ、モスクワのロシア連邦の習慣、国中の出荷と終点まで、海とヨーロッパを横断する方法を追跡することができました。 最初にカナダ郵便局、次にロシア郵便局。 一日中、彼はピンと針に座って、夕方にパンを郵便で走りました。 彼女は3月26日に到着しました。 パッケージは道路で2週間過ごしました。 ヨーロッパ全土と北米大陸の2か国を通過したと仮定すると、悪くはありません。
小包を外に出すのを忘れました-ちょうど40x60x40cmの段ボール箱で、内側にはすべての側面に新聞紙が並んだトロリーがあります(これらの新聞からカナダの新聞の全数を集めました-誰もバンクーバーで40万ドルで家を買いたくないですか?:))

トロリー自体は、耐久性のあるマットブラックのプラスチックでできています。 デザインは鋳造ではなく、さまざまな形状とサイズのプレートから組み立てられ、強力な接着剤で接続されているか、熱処理を使用して溶接されています-私は理解していませんでした。 プラットフォームのキャリア部分は「2階建て」です。上部にはネットブックが配置され、下部にはモーター、Arduinoボード、充電接点、すべてのワイヤが敷かれ、まだ多くの空きスペースがあります。
ネットブックの背面カバーはトロリーの「タワー」に寄りかかっており、2つの可動要素によってこの位置に固定されています。 要素が修正され、ネットブックの落下を防ぎます。 「タワー」の少し上にあるのは、ミラーの構造を制御するサーボモーターです。 ここにアイデアがあります-最初はネットブックのカメラの傾きを制御する方法がないため、2つのミラーの潜望鏡システムが発明されました。これは、下部ミラーが明らかにカメラの反対側にあるような高さに設置されます。 この設計全体は、上下に回転するサーボモーターにかかっており、オペレーターの視野角を変えます。 シンプルで便利。
Xaxxonには、いくつかのトロリーアクセサリーが販売されています。
-「タワー」の左側に掛けられたトロリー用の追加のLED懐中電灯は、USBを介して個別にオンになります。
-Asus Xtionセンサー用マウント(Kinectのアナログ)。
私はそれらを購入しなかったので、写真に表示できません。 すべての情報はXaxxon Webサイトにあります。
トロリーは、ATmega328上のArduino Duemilanoveボードの独自の変更を使用しており、Hブリッジ回路は既にボードに配線されています。 ボードはusbを介してネットブックから電力を受け取り(そう、トロリーにはエンジン用のバッテリーがありません)、モーターとペリスコープサーボモーターに電力を供給します。 エンジンの場合、ピン2、3、4、7、8、11が使用され、それらは引き出されません(11ピンを除く)。 4つのPWMピン5、9、10、11、2つのアナログ出力12および13、および標準のRX、TX、5V、GND、RSTを使用できます。 小規模な完了には十分すぎるほど。

モーターは2つあり、ギアを介して2つの車輪に接続されていますが、車輪はステアリングされていません。 タキシングは、車輪の反対の回転をオンにすることによって(または移動中に回転速度を変更することによって)実行され、後輪は回転を促進するように設計されています。


残念ながら、私は自宅にネットブックを持っていないので、長いUSBコードを介して接続することにより、仕事用ラップトップからカートを制御する必要がありました。 長いケーブルの抵抗はその役割を果たし、トロリーは非常に速く移動しませんが、非常に柔らかいカーペットの上でも自信を持って移動します。
カートは、Javaで記述されたソフトウェアを使用して制御されます。 Arduinoculusのすべてのソフトウェアとファームウェアは、code.google.comからダウンロードできます。 WindowsとLinuxの両方で機能するが、追加のコンポーネントをインストールする必要はない(Java VM自体を除く)と記載されています。 Windows Ultimate x64(noob、私はJavaを使用しています)での実行に成功しなかったとすぐに言います。x64プラットフォーム自体のJava仮想マシンに何かが接続されています。バッチファイルが開始され、そこで機能したようですが、応答がありませんスクリプト。 x86では、問題なく起動しました。 ソフトウェアはネットブックのローカルポート5080にしがみつきます。そこで、アクセス用のパスワード、クライアントを接続するための外部IPアドレスとポートを設定し、カメラを指定し、機器のパラメーターを調整できます。 バッチファイルを開始すると、ブラウザーのページが自動的に開き、これらすべてのパラメーターを構成できます。 開かない場合は、何かが間違っています。
メインコントロールは別のフォームから使用できます。
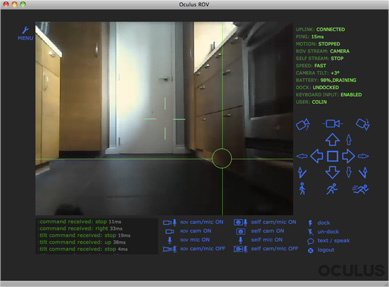
すべてが明らかだと思います。 正直に言うと、私は標準ソフトウェアで長い間掘りませんでした。すぐにボードを修正されたFirmataファームウェアに変更し、開発に使用しました。したがって、何をどのように詳細に伝えることはできませんが、それはYouTubeのビデオにあります
標準ファームウェアは非常にシンプルで、ボードを管理するためのコマンドが約12個あります。新しいモジュールを記述することで、標準ソフトウェアを簡単に拡張できます。
トロリーには、ネットブックのバッテリーを充電するためのドッキングステーションが付属しています。

充電スキームは簡単です-ネットブックの充電器からのワイヤがドックの側面に引っかかっています。 カートがドッキングステーションに近づくと、2つの接点がある前面がカートの下部にある2つのプレートに接触します。 これらの接点から、別の延長コードがカート内に延び、ネットブックの充電コネクタに差し込まれます。 また、簡単で正常に動作します。 もちろん、それはすぐに酸化する可能性があるため、連絡先をフォローする必要があります。
標準ソフトウェアは、ドッキングステーションに目を付けて写真を認識し、自動的にその近くに移動して、しっかりと接触します。 さて、ドッキング解除機能があります-カートは単に0.5メートル後ろに傾きます。
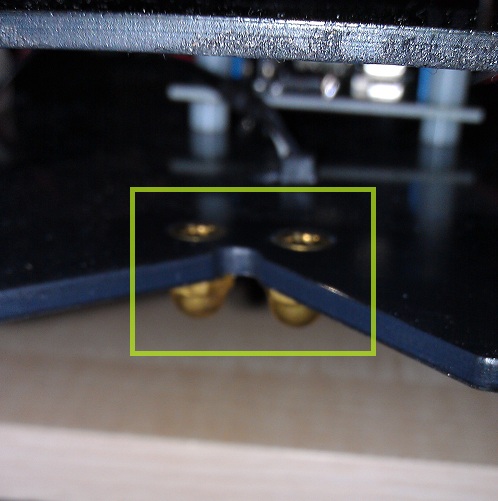
写真では-ドックの連絡先。
まとめ-関心のあるエンジニアにとって、それほど高くない価格でエンターテイメントにふさわしい候補者。 開発者は、Arduinoculusボードで作業する余地を残して試しました。トロリー自体は非常にシンプルで信頼性が高く、実際に失敗するものはありません。
PS写真の品質と書き方のために強く叩かないでください:)