このサイバープラットフォームは、最大9グラムのペイロードを搭載しています。
キャタピラを取ります。 ある時点で、彼女は自分自身を蝶に作り直し始めます。 質問は簡単です: サイボーグ昆虫を入手できるようにするために、彼女の合成成分を組み立て用に与えることは可能ですか? 答えはイエスです、できます。 そして、Michelle Maharbizがそれをやった。
このバークレーの科学者が最初のサイボーグの甲虫を作成したとき、軍はすぐに彼に来て(DARPA)、彼が人々を殺すつもりであるかどうかに加えて、彼の甲虫が逃げて必死に増殖し始めたらどうなりますか?
マハルビズは、サイボーグは性交渉中に集会の指示を伝えないので、彼は人を殺さず、危険な昆虫を(まだ)するつもりはなく、生殖を恐れていないと説明した。 彼は動物の権利活動家にカブトムシを苦しめなかったと説明し、虐待についての苦情はありませんでした。 確かに、彼は現在、昆虫を電子機器のコンポーネントとして使用することの倫理的側面を検討していますが、これは10番目のことです。
メディア選択
マハルビズはカブトムシを基礎としていた。 選択は非常に興味深いです。事実は、カブトムシの生物学的デザインは、バッテリーパックのようなものを含み、その重量の20%以上を運ぶことができるということです。 つまり、カブトムシにはアップグレードと機能のための予備があり、さらに長時間それを供給して使用の自由を広げるバッテリーがあります。
管理技術
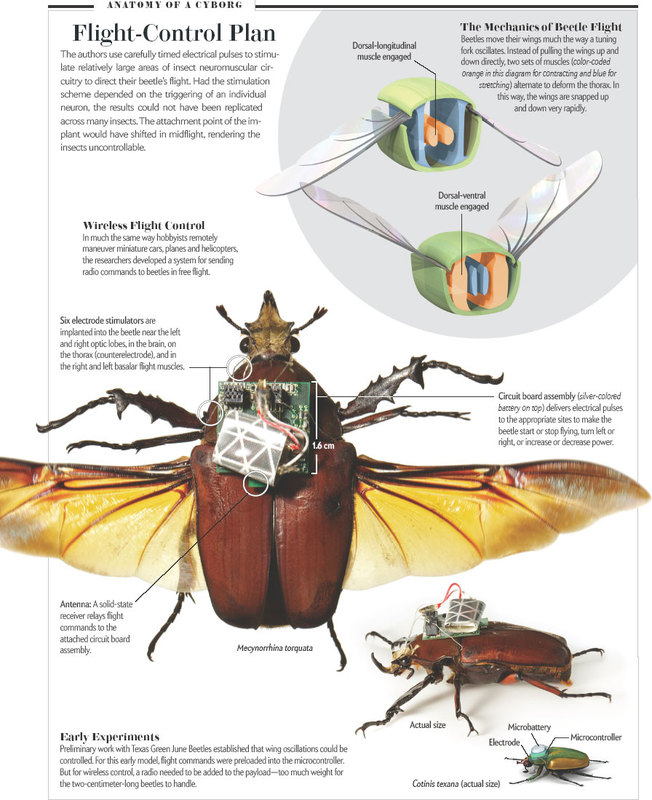
簡単に言えば、カブトムシは特定の共振周波数を介して制御されます。 筋肉のさまざまな出来事が甲羅の共鳴のさまざまな刺激を引き起こし、それが順番に他の特定の筋肉群の活動を活性化します。 共鳴を制御することにより、バグにコマンドを与えることができます。
マハルビズは、カブトムシの脳の視覚刺激剤と、基本的な筋肉のペアの電気刺激剤を取り込んで挿入しました。 相互作用の最初のタイプは、脳での作業です:開始と終了の振動。 2番目のタイプは、ターンのための両側の基底筋の刺激です。 大ざっぱに言えば、甲虫のこの筋肉が緊張すると、甲虫はターンがあることを完全に理解し、そうし始めます。 割り込みシステムのようなもの。
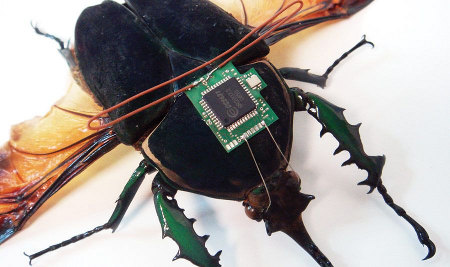
その後、システムはマイクロアンテナに変換されました。マイクロアンテナは、振動を聞いて翼を同期させるために送受信機と小さなマイクを備えたマイクロコントローラーです(甲虫は非常に複雑なパターンで飛ぶため、これは非常に重要です)。 Wiiはリモートコントロールとして接続され、バグとしてプレイし始めました。
最初に判明したのは、甲虫の脳内に、甲虫を「開始」および「停止」するコマンドが正しく実行される可能性が98%ある場所があることです。 信号に応じて、たとえば、カブトムシの生物系は飛行位置に適応し、信号が停止するまで停止できないサイクルに陥ります。 そのため、たまたま、「飛行着陸」と「右折-左折」という2つのチャネルを介してカブトムシを制御する方法を学びました。
7-9グラムのペイロードを運ぶことができるカブトムシがあることを考えると、その瞬間に軍隊がマハルビズと生物学全般に鮮やかに興味を持っていた理由は明らかです。
制限事項
誇張されたサイボーグのタイトルにアップグレードされたとしても、このバグはロボットではないことは明らかであるため、システムを調整することは不可能です。 制御エラーは昆虫ごとに異なります。実際、各サイボーグは独自の生物学的バランスシステムに加えて、外界からのさまざまな衝動に反応する世代のために構築された独自の神経システムを持っています。 カブトムシは角質が異なるため、シンクロナイザー-キャリブレーターとして機能するコントロールチェーンの中間リンクがないと、同じ反応は機能しません。
別の問題は同じ神経系に起因します。 管理は依然として低レベルです。つまり、影響の基本レベルに影響します。 責任ある任務を遂行する過程で、サイボーグは花、「異性のバグ」、または他の興味深く重要な何かに興味を持つかもしれません-そして、これは優先システムをすぐに破壊するか、単に外部活動を引き起こします。 最終的には、科学者とペンタゴンに関するバグについて誰も説明しなかったため、彼は何とか自分で生きようとします。
継続的な研究
その後、マハルビズの同僚は、飛行の管理を単独で担当した筋肉の石を見つけました。 特別な設置場所で昆虫をモデル化したため、直接的な影響のレベルではなく、おおまかに言って、生理学的な効果で甲虫の「思考」を導く制御の精度を高めることができました。 現在、科学者は正確な制御のために昆虫感覚システムからのフィードバックを欠いていますが、これはすでに決定されています。
プレイヤーを作りましょうか?
デジタル小型化は、生物学と非常に密接に関連しています。 生物系は自然界で広く利用可能であり、安価で再現が容易です。 多くの生物が存在し、加えてそれらは目的の段階まで除去することができます。 その結果、さまざまな機器のコンポーネントとしていくつかの昆虫を使用できるようになりました。 例えば、彼らはすでに内蔵のジャイロスコープ、飛行ユニット、標準センサーを持っています。
状況を想像してみてください。たとえば、1000ルーブルに加えて、約3〜4千ルーブルなどの昆虫のコストで制御されたプラットフォームを作成するために、ストリームに配置すると、制御用の基地局があります。 昆虫のこの非常に粗雑な使用は、最初は娯楽であり、次に産業であることが判明する可能性があります。
続けましょう。 あなたは、生きている鎖と生きていない鎖の混合物になる様々な奇妙なものを作り始めることができます。 合成制御ネットワークと生物学的コンポーネントはすでに現実のものであり、少し怖いです。 そして、これはまさにマハービズが現在バークレーで行っていることです。
おそらく、そのようなものの1つが既にあなたの後ろを飛んでいるのでしょう。
今、神経系を制御する
サイバーインプラントは、形成された段階でchに挿入できます(早すぎず-死に、遅すぎず-拒否されます)。 日本の科学者は、昆虫の頭へのマイクロコントローラーの埋め込みに関する研究を行ってきました。 このことが開発されたとき、コントローラーは、必要な周辺機器と電源をすべて接続できる理想的な制御システムになりました。 メディアはパニックに陥ったが、オープニングには特別な実用的な意味はなかった。
バークレーで1年半後、ニューロンが目に通過する蝶にインターフェースを埋め込む方法が見つかりました。 仮説を確認しました。穴の開いた柔軟なポリマーがchに埋め込まれ、驚くべき融合をもたらしました。 目は正しく形成されましたが、ニューロンはインプラントを通過しました。そして、このインプラントはそれらからデータを取得できました。 簡単に言えば、目からの画像を記録する技術を作成することが判明しました(ただし、入力の内容は明確ではありませんが、昆虫内部のデータ転送の「プロトコル」をデコードする必要があります)。
そのようなインプラントを持つ昆虫は通常通りに行動し、通常、それ自体の種類を含む外の世界に反応します。 現在、Maharbizグループは神経イベントを記録し、データを分析しています。 より多くのイベントを記録するためのインターフェースを減らす予定です。 夢は、昆虫センサーからすべてのデータを収集し、それらを自動制御やその他のタスクに使用することです。
そして電池も
次のブレークスルーは昆虫の燃料電池です。 科学者はグルコース燃料電池を修正し、バグに取り付けました。 カブトムシは体内にブドウ糖を送り(それと一緒に製品を食べる)、細胞は他のカブトムシのサイバーシステムのために電気を生成します。 現在、このようなセルは数週間機能しており、10〜20μWを出力します。 将来-数年と100mkW。 より多くのことができ、より高度な技術や昆虫のより多くの細胞が必要になります。 ラジオトランスミッターは、非常に困難なく簡単に組み立てることができ、高価です。

Maharbizは、バークレーからの信号のテストでHabrに挨拶を送ります。 今、彼はタイからの新しいバグを見せています:それからあなたは役に立つ何かを集めることができます。
参照資料
- デジタル10月のロシア語と英語の最近の講義 (昆虫の設計と生物工学研究の本質についてはたくさんあります)。
- バークレーのウェブサイトのミシェルについて 。
- DARPAおよびバグへの関心に関するニュース 。
- アルファ版のテストバグを含むビデオ 。
そして最後に、これらの素晴らしい人々の研究室で、神経系のプロジェクトが回転し、それが出力として塵を与えます。 スキンに適用して、たとえば携帯電話とのインターフェースを確立することが計画されています。 未来へようこそ。
PS Digital Octoberでの以下の無料の講義は、プロジェクトが投資されるべきものに最も近いものであり、 EQについてもう少し詳しく説明しています。