Mityaのソースコードの起動(私のロボットにフックされた名前)とシステムの予定外の再配置についてのメールで私に出された質問の背景に対して、私は使用する環境、それを構成する方法、ソースを展開する方法、およびMityaを起動する方法を説明することにしました。 興味があれば、さらに読み進めてください。 開発環境のセットアップに関する写真、ビデオ、テキストのドライストリームはほとんどありません。 ロボット工学の厳しい裏側。
この記事が、.NETアプリケーションまたはAndroidアプリケーションのプログラミングを整理した経験のないDIYの愛好家に役立つことを願っています。 プログラミング言語の質問を提起するつもりはありませんが、主な質問:「どこから始めればよいのか」はここで明らかになると思います。
.NETアプリケーション、Androidアプリケーション、およびArduinoスケッチを開発するための3つのIDEのインストールについて説明するほか、Microsoft Visual C#2010 ExpressでのStyleCop(C#コードの設計の制御)のインストール、EclipseでのCheckStyle(Javaコードの設計の制御)のインストールについても説明します同じExpress StudioとEclipseでの単体テストの編成。
開発ツールのそのような選択を決定するものは...私のプロジェクトは非営利で、家庭的でオープンです。 したがって、それに関与するすべてのソフトウェア製品は無料になるという考え。 Windowsがこのシリーズに適合しないことを除いて(オペレーティングシステムWindows 7 x64がコンピューターにインストールされています)。 しかし、現在、Android用とUbuntu用のArduino用に開発しています(ビデオをロボットからPCに転送するために必要でした)が、これは別の話であり、それについて話すには時期尚早です。 職場では、Visual Studio(Professional)の有料版を使用することに慣れていると言わなければなりません。 Expressバージョンとは異なり、拡張可能であり、私が使用しているプラグインのセットにより、仕事がより楽しくなります。 それにもかかわらず、私は必要なものをすべてExpressバージョンに「配置」し、もう少し機能的にすることができました。
この記事を公開するかどうか、DIYで公開するかどうかは疑問でしたが、ロボットメカニクスを組み立てたり、電子機器を設置することと同じくらい重要なことはミティアの不可欠な部分だと考えました。 多くの場合、DIYプロジェクトでは、メカニック、電子工学、プログラミングなど、非常にさまざまなトピックを一度に組み合わせます。 そして、ここでのプログラミングは、Arduino、Android、およびWindowsの3つのプログラミング言語と3つの異なる開発環境で実現しました。 DIYの愛好家は原則としてジェネラリストですが、助けても彼を傷つけることはないと思います。この記事は別のプロジェクトで役立ちます。
この記事は再び大きな記事になったため、目次を示します。
私のロボットがミティアである理由を一言。 彼の妻は彼に名前を付け、プロストクヴァシノのTr-tr Mityaを思い出しました(誰か知らない場合、「Tr-tr」はTRakToRであり、「Mitya」はエンジニアTyapkinのモデルです)。 そのため、同名の名前が判明しました。 私はタイプキンではありませんが そしてミティアは自分が呼ばれることを許しません。 そして彼はトラクターではありません。 しかし、あなたはそれをあなたの妻に証明することはできず、ミティアという名前は自宅で、職場で、友人の間で私のトラクターに割り当てられたので、記事ではさらにスキップします。
順番に。
ソースをダウンロード
プロジェクトはGoogleサービスコードで公開されています 。 Subversionバージョン管理システム(SVN)を使用しているため、ソースコードを取得するには、TortoiseSVNなどのSVNクライアントをインストールすることをお勧めします。
TortoiseSVNの最新バージョンをこちらからダウンロードしてください 。 ロシア語の言語パックはすぐにレイアウトされましたが、どういうわけか私はそれを使用することに慣れていませんでした。
この記事の範囲を超えてバージョン管理システムのトピックを取り上げますが、念のため、SVNに精通していない人のために、ソースをローカルディスクにダウンロードする方法について説明します。
TortoiseSVNをインストールしたら、「robot-mitya」などの名前を付けてフォルダーを作成します。 それを右クリックして、コンテキストメニューで[SVN Checkout ...]を選択します。 開いたウィンドウの「リポジトリのURL」フィールドで、「http://robot-mitya.googlecode.com/svn/trunk/」というテキストをコピーします。 「robot-mitya」フォルダーが「Checkout directory」フィールドに示されている必要があります。 OKをクリックします。 すべてのソースが「robot-mitya」フォルダーにロードされ、Android、Arduino、およびWindowsのディレクトリがそこに表示されます。
窓
Windowsフォルダーには、ユーザーインターフェイスを実装し、コマンドをAndroidアプリケーションのレベルに転送するWindowsアプリケーションのソースコードが含まれています。 アプリケーションは、XNAフレームワークを使用してC#で記述されています。 すべての設定方法を説明します。
Visual Studioをインストールして構成する
より正確には、Microsoft Visual C#2010 Expressのインストールと構成。 ここからインストールファイルをダウンロードします。 インストール中に、Microsoft SilverlightおよびMicrosoft SQL Server 2008 Express Editionをオプトアウトできますが、Mityaはこれらを必要としません。
次に、Microsoft XNA Game Studio 4.0をインストールします。 配布はこちらです。 スタジオへのインストール後、「Windows Game」テンプレートに基づいて作成されたプロジェクトで作業できるようになります。 RobotGamepad.csprojプロジェクトはまさにその例です。
StyleCopをインストールしてソリューションを構成する
C#コードの品質を制御するには、 StyleCopを使用します 。 これは必須ではありませんが、私の意見では、非常に便利なツールです。 特に初心者向け。
使用したくない場合、またはVisual Studio Professionalバージョン以降を使用している場合は、プロジェクトファイル「robot-mitya \ Windows \ RobotGamepad \ RobotGamepad \ RobotGamepad \ RobotGamepad.csproj」および「robot-mitya \ Windows \ RobotGamepad \ RobotGamepadTest \ RobotGamepadTest.csproj」。 次の行は使用できません。
<プロジェクトのインポート= "$(ProgramFiles)\ MSBuild \ Microsoft \ StyleCop \ v4.3 \ Microsoft.SourceAnalysis.Targets" />
「Microsoft.SourceAnalysis.Targets」ファイルへのパスはわずかに異なる場合があります。 StyleCopのバージョンに依存します。
Visual Studio Professional以降でStyleCopを使用する場合は、デフォルトのインストールオプションを選択してインストールします。 ディストリビューションはここからダウンロードできます 。 インストール時に、StyleCopはStudioに統合されます。
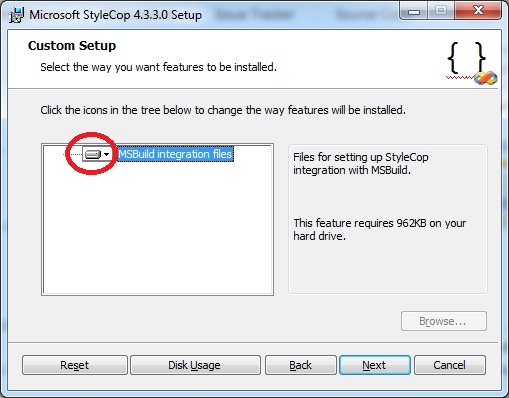
ExpressのVisual StudioバージョンでStyleCopを使用する場合は、Expressバージョンでは拡張機能がサポートされていないため、もう少し化学反応を行う必要があります。
インストール中に、「カスタムセットアップ」を選択し、インストール用に「MSBuild統合ファイル」を選択します。
StyleCopをインストールした後、コード品質管理を有効にするプロジェクトファイル( "robot-mitya \ Windows \ RobotGamepad \ RobotGamepad \ RobotGamepad \ RobotGamepad.csproj"および "robot-mitya \ Windows \ RobotGamepad \ RobotGamepadTest \ RobotGamepadTest.csproj" )、行の後
<プロジェクトのインポート= "$(MSBuildBinPath)\ Microsoft.CSharp.targets" />
行を追加する必要があります
<プロジェクトのインポート= "$(ProgramFiles)\ MSBuild \ Microsoft \ StyleCop \ v4.3 \ Microsoft.SourceAnalysis.Targets" />
メモ帳で改善する。 「Microsoft.SourceAnalysis.Targets」ファイルへのパスは、まず「Program Files」ディレクトリで明確にする必要があります。 この行の追加は、StyleCopをExpressバージョンのStudioに「ねじ込む」ためにのみ必要であることをもう一度強調します。 Professionalバージョン以上では、何もする必要はありません-StyleCopインストーラーはすべてを自分で行います。
StyleCopがインストールされ、コード設計の規則からの逸脱はコンパイラーの警告で処罰されます。
NUnitをインストールして構成する
単体テストには、NUnitを使用します。 この記事の執筆時点では、これはNUnitバージョン2.5.10でした。 インストール時に、すべてのインストーラーオプションがデフォルトで残されます。
設定するには、次の手順を実行します。
- プロジェクト「RobotGamepadTest」で、リンク「nunit-console-runner」および「nunit.framework」を削除して再追加します。 ライブラリはNUnitがインストールされたフォルダーにあり、それらへのパスはプロジェクトにインストールされたものと異なる場合があるため、再リンクすることをお勧めします。
- 「c:\ Program Files(x86)\ NUnit 2.5.10 \ bin \ net-2.0 \ nunit-x86.exe」を実行します。 テストを実行し、すべてが機能することを確認します。 「X86」は存在しない可能性があります。Windows7 x64とx86でビルドされたテストプロジェクトがあります。
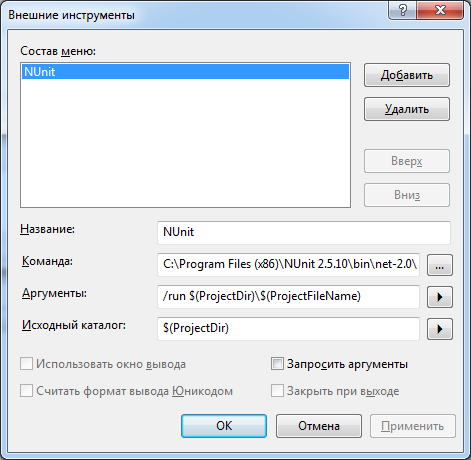
- テスト実行を構成します。 これを行うには、NUnitユーザーインターフェイス呼び出しをStudioの外部ツールに追加します。
- [ツール]> [オプション]> [詳細オプション]の下のボックスをオンにします。 「オプション」ではなく「オプション」だけです!
- [ツール]> [外部ツール...]を選択します。
- [外部ツール]ダイアログで、フィールドに入力します。
- RobotGamepadTestを起動されたプロジェクトに割り当てます。 これを行うには、RobotGamepadTestプロジェクトを右クリックし、コンテキストメニュー項目「開始するプロジェクトとして設定」を選択します。
Android
ここでは、Android向けのプログラミング環境の基本的なセットアップについて説明します 。 公式のロシア語の翻訳はまだないので、以下に私の行動を説明します。 さらに、プロジェクトの機能を使用して基本セットアップを拡張します。
ところで、このトピックはすでにHabréで取り上げられていますが、私の記事の目標はMityaロボットプロジェクトの環境を準備することなので、どこかでそれを繰り返す必要があります。 さらに、違いがあります。
Java Development Kit(JDK)をインストールします
配布はこちらです。
Windows 7 x64の場合、jdk-7u3-windows-x64.exeという最新のJDKバージョンをダウンロードします。 インストールは難しくありません-デフォルトですべてのオプションを残します。
Android SDKをインストールする
ここからSDKをダウンロードします。 Windowsインストーラーを使用するか、zipアーカイブを使用できます。 私はこれをやったのですが、今ではもう「Android-SDK」フォルダーを別のハードドライブからコピーするだけです(もうすべてを手に入れたら)。 「c:\ android-sdk」フォルダーにインストールすることをお勧めします。
IDEをインストールする
Eclipse Classic 3.7.1を使用しています。 こちらからダウンロードできます。 繰り返しますが、Windows 7のバージョン(私の場合、x64の場合)。 アーカイブ「eclipse-SDK-3.7.1-win32-x86_64.zip」を取得します。 ドライブCのルートディレクトリに直接展開しました。一度、Windows VistaおよびWindows 7のバージョンのMicrosoft Virtual Storageを既に「理解」していました。この狂気に対処することはできますが、同じ熊手を歩きたいとは思いません。 したがって、EclipseをProgram Filesに入れません。 ルートディレクトリを乱雑にしたくない場合(フォルダをそこに配置します)、ルートに1つ作成し、残りをそこにダンプすることをお勧めします。
これでEclipseを実行できます(c:\ eclipse \ eclipse.exeがあります)。 最初の起動時に、「Workspace Launcher」ウィンドウが表示され、作業ディレクトリを選択するための提案が表示されます。 「c:\ robot-mitya」と示しました。 次に、Eclipse IDEが開きます。 ミティアのプロジェクトはまだ開かれていません-まだやるべきことがあります。
Eclipse用のADTプラグインをインストールする
Android Development Tools(ADT)プラグインは、Androidソフトウェア開発の観点からEclipseの機能を拡張します。 ADTプラグインをインストールして構成するには、次の手順を実行します。
- [ヘルプ]メニュー> [新しいソフトウェアのインストール] ...
- 追加ボタン。
- [リポジトリの追加]ダイアログの[名前]フィールドに、たとえば[場所]フィールドに「ADTプラグイン」と入力します-「https://dl-ssl.google.com/android/eclipse/」、[OK]をクリックします。
- [利用可能なソフトウェア]ダイアログで、[開発ツール]の横にあるチェックボックスをオンにし、[次へ]をクリックしてから、[次へ]をクリックしてライセンス契約に同意し、[完了]をクリックします。
- Eclipseを再起動します(提案します)。
- 再起動後、Eclipseから「Welcome to Android Development」ウィンドウが表示され、Android SDKを再ダウンロードするか、インストール済みのSDKのフォルダーを指定するように提案されました。 当然、最後の1つを選択して[次へ]をクリックし、Googleへの統計の送信を拒否する権利を利用して、このウィンドウを終了しました。 ちなみに、私がこのすべての知識を引き出したマニュアルには、このウィンドウに関する言葉はありませんでした。 Android SDKへのパスを設定する別の方法について説明します。 念のために説明します。[ウィンドウ]> [設定]メニューで、左側の[Android]を選択し、右側の[SDKの場所]フィールドに入力します。
プラットフォームのパッケージのインストール/更新
「SDK Manager」を起動します。 これはEclipse([ウィンドウ]メニュー> [Android SDKマネージャー])から直接実行できるようになり、便利なようですが、お勧めしません。 事実、マネージャーは何らかの理由でモーダルウィンドウとして開き、マネージャーで作業しているときにEclipseを失います。 今はまだ怖くありませんが、プログラミングを始めると不便になります。 したがって、IDEをバイパスしてマネージャーを実行することをお勧めします:“ c:\ android-sdk \ SDK Manager.exe”。
これは、私のAndroid開発環境をセットアップするのに最も嫌いな場所です。 理由はわかりませんが、SDKマネージャーは非常に遅いです。 トラフィックアカウントはギガバイトになります。ギガバイトは何時間もカウントされます(夜も残されます!)。 私はそれが何に関連し、そこで何をするのか理解していませんが、パッケージをインストールするための簡単なステップを挙げることはできません。 以前に構成したディレクトリc:\ android-sdkをコピーしたため、この手順をスキップできました。 そして、外付けHDDからコピーするのに約20分かかりました。 このディレクトリには約67000個のファイルが含まれています。
私が理解しているように、Mityaの場合、Android 2.3.3(API 10)の「SDK Platform」および「Google APIs by Google Inc.」パッケージ、および「Tools」および「Extras」グループのパッケージで十分です。 確かに、私はすべてのプラットフォームの下にパッケージを置きます。 欲から、そしてあなたは私が取り上げるプロジェクトを知らない。 したがって、パッケージのインストール時間を大幅に節約できます。
正直なところ、ほとんどのパッケージの目的は私には謎です。 それらのいくつかはインストールされていませんが、これは、私が理解しているように、正常です。
Android SDKがインストールおよび構成されています。必要に応じて、中身を確認し、その内容についてはこちらをご覧ください 。 コマンドラインが好きな人には、パスをtools /およびplatform-tools /フォルダーにPATH環境変数に追加することをお勧めします。 これまでのところ、コマンドラインは不要です。
Eclipse Marketのインストール(オプション)
Eclipseでプラグインを見つけてインストールするための非常に便利なサービス。 Eclipse Indigo(インストールしたばかりのバージョン)をインストールした後、MarkはすでにIDEの一部でしたが、いや、間違っているか、まだないようです。
インストールするには、次を実行します。
- [ヘルプ]メニュー> [新しいソフトウェアのインストール] ...
- 表示される[インストール]ダイアログの[作業]フィールドで、ドロップダウンリストから[Indigo-http://download.eclipse.org/releases/indigo]を選択します。
- たとえば、フィルターフィールドに「market」という単語を入力します。 フィルターされたリストで、「Marketplace Client」の前にチェックマークを付けます。
- 次に、次に、ライセンス契約の条件である[完了]、[今すぐ再起動](Ecplipse)に同意します。
これで、[Eclipse Marketplace ...]アイテムが[ヘルプ]メニューに表示されます。
Checkstyleのインストール(オプション)
Visual StudioのStyleCopに類似した便利なツール。コードを作成するときに混乱することはありません。 特に初心者には(そして次に行く場所はありません)置くことを強くお勧めします。 インストール:
- [ヘルプ]メニュー> [Eclipse Marketplace] ...
- 「検索」フィールドに「checkstyle」と入力し、「実行」ボタンを押します。
- 「Checkstyle Plug-in」が見つかります。「Install」ボタンをクリックすると、すべてが明確になります。
これで、Checkstyleルールの観点から見たコードの悪い部分は黄色でマークされ、修正する必要があります。 私のプロジェクトでは、プラグインに含まれている「Sun Checks(Eclipse)」ルールセットを使用します。 コード実行ルールはカスタマイズできますが、私は、チェックスタイルルール(およびコード実行の制御システム)を「自分用」、「会社用」、または「プロジェクト用」に微調整することを断固として禁止しています。 これはどこにも行かない方法であり、コードの設計を制御することはできません。 しかし、1つのルールにより、このすべての基本原則が理解でき、オフにする必要がありました。 悔い改めます。 これにより、文字列の最大長が80文字に制限されます。 現代のモニターの80文字は奇妙に見えます。 ルールの説明には、「理由:プリントアウトで長い行を読むのが難しい場合や、IDEがプロジェクトツリーやクラス階層などの追加情報を表示する場合など、開発者がソースコードの画面スペースに制限がある場合」 哀れな説明。
Checkstyleの構成はMityaのAndroidプロジェクトに既に追加されているため、他に何も構成する必要はありません。
作業ディレクトリ(ワークスペース)にプロジェクトを追加する
- RoboHeadプロジェクトを追加します。 ファイル>新規>プロジェクト...
- 開いた[新しいプロジェクト]ダイアログの[ウィザードの選択]ステップで、Androidリストを開き、[Androidプロジェクト]を選択します。 次へをクリックします。
- ステップ「Androidプロジェクトの作成」で、「既存のソースからプロジェクトを作成する」オプションを選択し、場所「c:\ robot-mitya \ Android \ RoboHead」を指定します。
- ここ(ステップ「Androidプロジェクトの作成」)で、「プロジェクト名」フィールドに「RoboHead」と入力します。 次へ
- 「ビルドターゲットの選択」ステップで、APIレベル10の「Google API」プラットフォームが選択されていることを確認します。
- 「アプリケーション情報」ステップの「アプリケーション名」フィールドで、「RoboHead」を指定します。 終わり
- 次に、RoboHeadTestプロジェクトを追加します。 再びファイルメニュー>新規>プロジェクト...
- 「ウィザードの選択」ステップの「新規プロジェクト」ダイアログで、Androidリストを開き、「Androidテストプロジェクト」を選択します。 次へをクリックします。
- [プロジェクト名]フィールドの[Androidプロジェクトの作成]ステップで、「RoboHeadTest」と入力します。
- ここで(「Androidプロジェクトの作成」ステップ)「既存のソースからプロジェクトを作成する」オプションを選択し、場所「c:\ robot-mitya \ Android \ RoboHeadTest」を指定します。 次へ
- 「ビルドターゲットの選択」ステップで、APIレベル10の「Google API」プラットフォームが選択されていることを確認します。 この時点でアクティブな[次へ]ボタンが押されていない場合に遭遇しました。 その後、テストプロジェクトを追加するステップにロールバックし、「Androidテストプロジェクト」としてではなく「Androidプロジェクト」として追加するのに役立ちました。
- 「アプリケーション情報」ステップの「アプリケーション名」フィールドで、「RoboHeadTest」を指定します。 終わり
仮想デバイスの作成(Android Virtual Device)
仮想デバイスまたはAndroid Virtual Device(AVD)は、Androidアプリケーションとテストを実行できる電話エミュレーターです。 私はしばしば電話で直接デバッグしましたが。
仮想デバイスを作成する前に、Windowsで環境変数を調整することをお勧めします。
- 「c:\ android-sdk」などの値を持つ新しいANDROID_SDK_HOMEシステム変数を追加します。 Windows 7およびこの変数の機能については、Web上で多くの議論があります。 Windows 7のエミュレーターでのAndroidロードエラーの場合、この変数を定義することをお勧めします。 このような問題は発生しませんでしたが、この変数が、作成された仮想デバイスのイメージと設定が保存されるディレクトリを再割り当てするという事実が気に入りました。 デフォルトでは、このディレクトリはユーザーのフォルダのどこかに埋まっています。
- 環境変数を設定するダイアログが表示されているため、PATH変数のパスのリストを補充できます。 「c:\ android-sdk \ tools \; c:\ android-sdk \ platform-tools \」を追加します。
仮想デバイスを作成するには、アプリケーション「c:\ android-sdk \ AVD Manager.exe」を実行します。 Eclipseから呼び出すこともできますが、何らかの理由でモーダルウィンドウ(Window> AVD Manager)の形式で(SDKマネージャーのように)呼び出すこともできます。 環境変数が定義される前にEclipseがロードされた場合は、忘れずにEclipseを再起動してください。 [新規...]をクリックし、開いたダイアログで[名前]フィールドに入力します。たとえば、[Google_APIs_Level_10](スペースは使用できません)、[ターゲット]フィールドで[Google API(Google Inc.)-APIレベル10]を選択します。 残りのフィールドは変更しないでおくことができます。 AVDボタンを作成します。 ANDROID_SDK_HOME変数を再定義すると、「。android」フォルダーが仮想デバイスのイメージと構成とともに「c:\ android-sdk」フォルダーに表示されます。
仮想デバイスを起動しようとします。リストでそれを選択し、「開始」ボタンをクリックしてから「起動」をクリックします。 最初の起動は非常に長くなります。
電話でアプリケーションを起動する
電話のセットアップ:
- 電話メニューで、[設定]> [アプリケーション]を選択します。 「不明なソース」オプションにチェックを付けます。
- ここで、「開発」サブアイテムを選択し、「USBデバッグ」オプションにチェックマークを付けます。
次に、電話にアクセスするためのドライバーをインストールする必要があります。 Android Developer Phone(もしそうなら)、Nexus One、またはNexus Sをお持ちの場合、Googleはそのドライバーを提供します。 それ以外の場合、Googleはメーカーを指します。 HTC Sensationでドライバーをインストールする最も簡単な方法は、 HTC Syncをインストールすることです(プログラムは無料です)。
これで、すべてを携帯電話にダウンロードして、RoboHeadアプリケーションを起動する準備が整いました。 Eclipseに移動し、RoboHeadプロジェクトで[実行]をクリックします。開いたダイアログで電話を選択すると、満足のいくミティアが画面に表示されます。
Arduino
開発環境のインストールと構成については、 ArduinoプロジェクトのWebサイトで詳しく説明されています。 Windowsのインストールについて簡単に説明します。 プロジェクトに必要な一般的なインストールへの唯一の追加は、2つのライブラリの追加です。
IDEのインストール
執筆時点での現在のスケッチは、Arduinoバージョン1.0用に書かれています。 Arduinoバージョン0022および0023と完全に互換性があります。他のバージョンについては何も言えません。チェックしていません。 IDE でアーカイブをダウンロードします。 アーカイブをドライブCのルートディレクトリに直接解凍しました。
Windows 7にArduino Unoドライバーをインストールする
彼らは、Vistaでのインストールが同一であることを約束します。 次の手順を実行します。
- Arduino Unoをコンピューターに接続します。 コントローラの緑色の電源LEDが点灯します。 Windowsはドライバーのインストールをかなりシミュレートし始めます。
- Windowsは、「ドライバーソフトウェアがインストールされていません」というメッセージを表示します。
- デバイスマネージャーを開きます。 Arduino Unoには感嘆符が付いています。 Arduino Uno、「ドライバーの更新...」を右クリックします。 次に、「このコンピューターでドライバーを検索する」を選択します。 そして、パス「C:\ arduino-1.0 \ drivers」を指定します。 Windowsはパブリッシャーが不親切であると疑いますが、私たちは粘り強くなければなりません。 結果:「このデバイスのソフトウェア更新は正常に完了しました。」 タイトルバーはポートを示します。 COM3がありました。 番号を覚えておいてください、それは私たちにとって有用です。
IDEの起動と構成
「c:\ arduino-1.0 \ arduino.exe」を実行して、「不明な発行元」を再度許可し、いくつかの便利なチェックマークを付けることができます。
- 「ファイル」>「設定」メニューで、「。inoファイルをArduinoに自動的に関連付ける」オプションを有効にできます。 奇妙ですが、このオプションは保存されていません。 ファイル拡張子をIDEに手動で関連付ける必要がありました。
- ツール>ボードメニューでArduino Unoコントローラが選択されていることを確認してください。
- [ツール]> [シリアルポート]メニューから、コントローラーが接続されているCOMポートを選択します。 以前、私たちはそれを覚えていました、私はそれをCOM3にしました。 覚えていない場合は、デバイスマネージャーを確認します。
Arduino IDEのインストールと構成の確認
arduino.cc Webサイトの手順では、デモスケッチを実行してIDEのインストールと構成を完了することをお勧めします。 これを行うには、次の手順を実行します。
- メニューファイル>例> 1.基本>点滅。 IDEウィンドウが開き、短いスケッチが表示され、コントローラーボードに取り付けられた黄色のLEDを点滅させることができます。
- スケッチのコンパイルを確認するには、メニュー項目[スケッチ]> [検証/コンパイル]をクリックします。
- スケッチをコントローラーのメモリにロードして起動するには、メニュー項目[ファイル]> [アップロード]を選択します。 すべて、コントローラーの13番目の脚のLEDが2秒間隔で点滅を開始します。
Mityaのスケッチに必要なライブラリのインストール
Mityaスケッチをコンパイルするには、標準のArduino IDEパッケージの一部ではない2つのライブラリが必要です。 プロジェクトページから、 IRremote.zipおよびUSBHostShield2.zipアーカイブをダウンロードする必要があります。 ライブラリをインストールするために必要なことは、これらのアーカイブを「C:\ arduino-1.0 \ libraries」フォルダに解凍し、Arduino IDEを再起動することです。
コントローラでMitinスケッチを埋めることができます。
ミティアの打ち上げ
PCからMityaを制御するには、電話とコンピューターが同じローカルネットワーク上にある必要があります。 私のスマートフォンがルーターとしても機能できるのは素晴らしいことです。したがって、外部のWi-Fiルーターがなくても実行できます。
したがって、現時点では:
- スマートフォンとPCは同じローカルネットワークに接続されています。
- Mitinコントローラーは、スケッチrobot_control.inoでアップロードされます。
- RoboHeadアプリケーションが電話にインストールされています。
- PCに接続されたXBOX 360ゲームパッド。
- コンパイルされ、RobotGamepad.exe Windowsアプリケーションを実行する準備ができました。
ロボットの電源を入れます。 サーボはホルダーを持ち上げて、電話の取り付けを簡単にします。 電話をホルダーに接続して固定します。 ロボットコントローラーへの接続の識別は電話で機能し、RoboHeadアプリケーションが自動的に起動します。
次に、PCでRobotGamepadアプリケーションを起動し、ゲームパッドの[スタート]ボタンを押します。 ミティアの準備ができました、行きましょう!
UPD:
Mityaの場合、AndroidおよびUbuntu(11.10)の開発環境を展開する必要があると既に述べました。 ここにはいくつかの機能があります。 すでに退屈な記事を繰り返してサイトのユーザーを苦しめることはありませんので、このトピックに興味がある人はここですべて説明します 。