 この記事では、GPS衛星から車の現在の速度、座標、時間に関する情報を受信する自家製の速度計に焦点を当てます。 また、この記事は、Cortex Mコアを使用した32ビットマイクロコントローラーの開発の最初のステップに役立ち、その開発で使用するリアルタイムオペレーティングシステム(RTOS)の1つをマスターしたいと考えています。
この記事では、GPS衛星から車の現在の速度、座標、時間に関する情報を受信する自家製の速度計に焦点を当てます。 また、この記事は、Cortex Mコアを使用した32ビットマイクロコントローラーの開発の最初のステップに役立ち、その開発で使用するリアルタイムオペレーティングシステム(RTOS)の1つをマスターしたいと考えています。
ハードウェア実装
彼は自分自身のために座って、16番目と18番目のpic'kiの下でアセンブラーで書いたが、彼は悲しみを知らなかった。 しかし、32ビットマイクロコントローラーを研究する時が来ました。 最も有望なのはSTM32(つまり、ARM Cortex M3コア)の選択でした-RuNetでは、指数関数的に増加する記事の量が多いため、マイクロコントローラーは価格が非常に魅力的で、多くの機能を備えており、大きな可能性があります プロジェクトの成長に伴い、このカーネルのより生産的なバージョン-Cortex MからCortex Aに作業を移すことができます。さらに、AppleはiPhone、iPad-ARM Cortexで同じコアを使用します。 より強力な「A」のみ。
衛星速度計を実装したデバッグボードとして、eBayでHY Redbullクローンの1つを約70ドルで購入しました。

このボードは、STM32F103VCT6マイクロコントローラー(72MHz、512Kb FLASH、64kb SRAM、3ACP、2CAP、DMA、FSMC、5xUSART、2xI2C、3xSPI、CAN、USB 2.0 FSなど)とその周辺機器に精通しているほか、基本的な外部機器を習得できます-MP3 / WMAデコーダーVS1003、イーサネットコントローラーENC28J60、タッチスクリーン付き3.2インチLCDスクリーン(SSD1289コントローラー)、SDカード(コネクターボードの下)、USB、CAN、RS232 / 485、CH376コントローラー(USBホストインターフェイスを実装) / SD <-> UART / SPI / 8ビットパラレル、SDカードとUSBフラッシュドライブをMKに接続します)。
UART経由でSTM32にファームウェアをアップロードできます。 実際、プログラマー自体は必要ありません。 ただし、ボードのJTAGポートが対象とするデバッグツールを使用する方がはるかに便利です。 JTAGデバッガーにさらに20〜50ドルを費やすことができますが、組み込みのDiscoveryシリーズデバッガーを備えた独自のSTデバッグボードを使用することをお勧めします。 費用は10ドルからです(同時に、STM32をマスターするために必要なものの基本である、それは本当にすべてです)。 STM32F4-DiscoveryデバッグボードをJTAGのデバッガーとして使用しました(一般的に、セミナーの訪問者として無料で入手しました。費用は約600ルーブルです)。
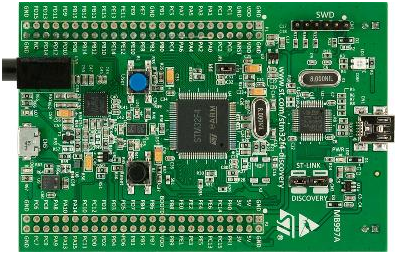
-ARM Cortex M4(STM32F407)のデバッグを目的としています。ボード上にビルトインデバッガがあります(ジャンパーはSWDを介してstm32f407デバッグから外部ボードデバッグに切り替えることができます。 このマイクロコントローラーはすでに168 MHzの周波数で動作します(ただし、リビジョン「A」の小石は湿っていますが、このリビジョンではパフォーマンスの低下はメモリアクセラレータによるものです)。 フラッシュ1MB、RAM 128KB。 内蔵の周辺機器から、USBデバイス/ホスト/ OTG、10/100イーサネット、カメラインターフェイス(最大1Mpixまで接続可能)、ハードウェアCRCカウント、およびDSPプロセッサに注目する必要があります。 外部周辺から、ボードにはLIS302DL MEMS加速度計、MP45DT02デジタルMEMSマイク、およびI2S CS43L22インターフェイスを備えたADCが含まれています。 ボードには多くの例がありますが、その中でも特に、プラグインUSBフラッシュドライブ(USB OTG、MEMSマイク、オーディオi2s dacのデモ)で動作するディクタフォンプレーヤーが気に入っています。
GPS受信機の選択に関しては独創的ではありませんでした。 彼は非常に一般的なEB-500を取りました。 ボードを配線するときに苦痛にならないように、すぐにキットにアクティブアンテナを備えたEB-500 EVBキットデバッグボードを用意しました。

受信機自体は、UARTを介してデータを出力します。 しかし、CP2102に基づくUART-USBコンバーターのおかげで、ボードはすぐにUSB経由で接続できます。 このバンドルには、チップの機能を実証するEB Viewソフトウェアが付属しています。 NMEAデータの出力を確認したり、チップが表示する必要があるフィールドのリストを設定したり、出力の頻度を設定したり、AGPSを試したりすることができます。 シリアルポートモニターを使用して、EB-500とのEB View通信のダイアログを監視し、デバイスの起動時に対応するeb-500セットアップを実装できます。 まあ、またはデータシートを調べてください)また、ボードには、デバイスの電源を切ったときにアルマナックを保存するための3ボルトのバッテリーがすでにあります。 後続のクイックスタート用。
また、これらのボードを切り替えるためにいくつかのケーブルを購入しました-www.dealextreme.com/p/30cm-breadboard-wires-for-electronic-diy-40-cable-pack-80207#open%20full%20view-とても便利で便利です。
ソフトウェア実装
Keil環境を選択しました。 豊富なサンプルを備えた便利で広範囲に渡って...一言で言えば「私の」。 :) Firebullボードに付属のライブラリを使用してGLCDを操作しました。
 彼は、リアルタイムオペレーティングシステム(RTOS)としてFreeRTOSを選択しました-その上に文学の海があり、活発に開発されており、これらおよび他の要因により、他のものと比較してより好ましいです-uC / OS、scmOSなど さらに、プリエンプティブモードとコーポレートモードの両方、および複合動作モードをサポートしています。 そして私にとって、初心者として、これはプラスです。 :) RTOSにまったく精通していないが、FreeRTOSの使用例に慣れてプロジェクトで使用したい場合は、 microsin.net / programming / ARM / freertos - part1.html-すべてそこに記載されている、開始する必要があります。 その後、FreeRTOSディストリビューションキットをダウンロードし、マイクロコントローラの既製の例をそこから取り出して、完成させ、作業を楽しんでください。 一見、すべてが実際にはそれほど複雑ではないことが判明しました。 :)
彼は、リアルタイムオペレーティングシステム(RTOS)としてFreeRTOSを選択しました-その上に文学の海があり、活発に開発されており、これらおよび他の要因により、他のものと比較してより好ましいです-uC / OS、scmOSなど さらに、プリエンプティブモードとコーポレートモードの両方、および複合動作モードをサポートしています。 そして私にとって、初心者として、これはプラスです。 :) RTOSにまったく精通していないが、FreeRTOSの使用例に慣れてプロジェクトで使用したい場合は、 microsin.net / programming / ARM / freertos - part1.html-すべてそこに記載されている、開始する必要があります。 その後、FreeRTOSディストリビューションキットをダウンロードし、マイクロコントローラの既製の例をそこから取り出して、完成させ、作業を楽しんでください。 一見、すべてが実際にはそれほど複雑ではないことが判明しました。 :)
それでは、EB-500 GPS受信機からデータを受信し、3.2インチのLCD画面に表示する衛星速度計のソースコードを見てみましょう。
int main(void)
{
prvSetupHardware();
vSemaphoreCreateBinary( xBinarySemaphore );
if (xBinarySemaphore != NULL){
xTaskCreate( vLEDTask, ( signed char * ) NULL , LED_TASK_STACK_SIZE , NULL , LED_TASK_PRIORITY , NULL );
xTaskCreate( vGPSTask, ( signed char * ) NULL , GPS_TASK_STACK_SIZE,NULL , GPS_TASK_PRIORITY , NULL );
//
vTaskStartScheduler();
}
return 0;
}
-セマフォを作成します(詳細は以下を参照)。 優先度の異なる3つのタスクを開始します。 vLEDTask()優先度が最も低くなります-LEDを点滅させ(「凍結していないので生きています!」)、現在のシステム時刻を画面に表示します。
vGPSTask()は優先度が高く、起動後はコニー...スリープ状態になり、セマフォの受信を待機します。
prvSetupHardware()は次のことを行います。
static void prvSetupHardware( void ){
SysTick_CLKSourceConfig( SysTick_CLKSource_HCLK );// HCLK
NVIC_Configuration();//
GPIO_Configuration();// /,
USART2_9600(); //UART2 GPS EB-500, 9600/
RTC_Init();//
LCD_Initializtion();//
LCD_Clear(Blue);// -
}
まず、カーネルのクロック用にHCLKを設定し、NVIC割り込みコントローラー(USART2でデータを受信するときに割り込みを有効にする必要があります)、GPIO、USART2ピン(GPS受信機が接続されている)を9600ボー、1ストップビット、パリティなし、8ビットに設定し、最後の行-RTC_Init()-組み込みのRTC周辺機器をオンにします-現在の時刻と日付を表示します。 そして、ボードにバッテリーを貼り付けると、電源がオフになったときに時間を無駄にしない本当の機会があります。 :)
割り込みハンドラーは、stm32f10x_it.cファイルで、アセンブリスタートアップ_ *。Sファイルで示されている名前で設定されます。 ハンドラーが1つだけ必要でした-GPS受信機からUSART2からバイトを受信するための割り込み:
void USART2_IRQHandler(void)
{
static portBASE_TYPE xHigherPriorityTaskWoken;
if (USART_GetITStatus(USART2, USART_IT_RXNE) != RESET){// –
IrqBuf[IrqBuf_idx++]=USART_ReceiveData(USART2);// EB-500
if (IrqBuf_idx==BUFSIZE){//
IrqBuf_idx=0;
}
else if (IrqBuf[IrqBuf_idx-1]==0x0A){//
IrqBuf[IrqBuf_idx]=0x00;
IrqBuf_idx=0;
xHigherPriorityTaskWoken = pdFALSE;
xSemaphoreGiveFromISR( xBinarySemaphore, &xHigherPriorityTaskWoken );
}
USART_ClearITPendingBit(USART2, USART_IT_RXNE);//
}
}
-割り込みハンドラーで、行の終わりを確認します。 改行文字0x0Aが見つかった場合、EB-500からのNMEAデータを含む文字列を解析できます。 割り込みハンドラーで直接、すべての処理を実行することはイデオロギー的に間違っており、時にはそれは単に危険です-次の割り込みが発生するまで間に合わない場合があります。 処理は、最も優先度の高い別のタスク-vGPSTask()で行われましたが、タスクは「スリープ」し、セマフォの受信を待機しています。 そして、割り込みハンドラーのxSemaphoreGiveFromISR()がその出力を担当します。 セマフォを設定し、割り込みフラグをリセットし、ハンドラを終了します。割り込みが発生する前に別のタスクが処理された場合でも、すぐに制御がvGPSTask()に転送されます。 これはセマフォのおかげで実行する権利を取得します。
NMEAデータの処理が開始されます。つまり、EB-500の次の行に関心があります。
$GPRMC,161229.487,A,3723.2475,N,12158.3416,W,0.13,309.62,120598,,*10
$GPVTG,309.62,T,,M,0.13,N,0.2,K*6E
$GPGGA,161229.487,3723.2475,N,12158.3416,W,1,07,1.0,9.0,M,,,,0000*18
-そのような各パッケージは、チェックサム(* 10、* 6E、* 18)および改行文字(0x0D、0x0A)で終了します。 すべてのデータは、$ GPRMCに「A」がある場合にのみ関連があると見なされます(上記の例のように)。 それ以外の場合、「V」を取得します。 この例の「V」では、「信号なし」が表示されます。 次に、データを解析して表示します。
*パッケージ$ GPRMCから、現在の時刻をhhmmss.sss形式で引き出します(上の例では161229.487です)
*パッケージ$ GPVTGから、現在の速度を時速キロメートル(0.2、K-時速0.2キロメートル)で取得します。
*パッケージ$ GPGGAから、地理的な経度と幅をddmm.mmmm / dddmm.mmmmの形式で取得します(例では、緯度は3723.2475、経度は12158.3416)
プロジェクトの完全なソースコードは、記事の最後のアーカイブにあります。 この例には欠点がないわけではなく、主な点は両方のタスクが同じハードウェアリソースを参照していることです。 ミューテックスまたはゲートキーパーを作成することで解決できます。 私は宿題の質に興味を持っている決定を残します。 しかし、これなしで例を使用することができます-すべてが動作します...
私の車でシステムを操作すると、良い結果が得られました。 寒い場所で車を始動しても、ボード(MC34063ベースのDC-DCダウンコンバーターへの電源供給)に問題はありません。 eb-500のコールドスタートは20、ホットスタートは0.5分でした。 予想どおり、駐車すると座標のドリフトが発生します。それに応じて、速度は最大0.5、場合によっては最大7 km / hになります。 モバイルデバイスの場合、これは無視できますが、私が取り組んでいるsim900 gsmモジュールに基づいた自家製の衛星信号では、これは具体的な問題です。 ポジティブな瞬間-このスピードメーターのおかげで、私の車の標準的なスピードメーターが時速5kmで急いでいることがわかりました。
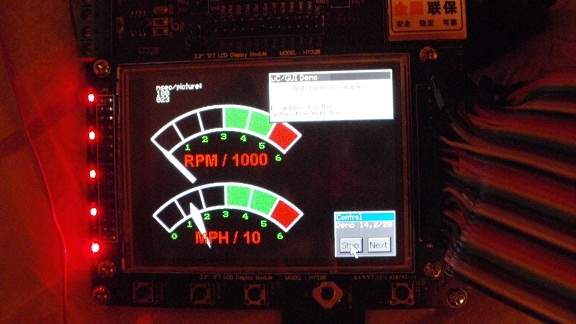
今が、自家製の衛星速度計の写真撮影の時です。


-画面上の16:45:03はUTC時間です。 モスクワに移動するには、4時間を追加する必要があります(冬時間への切り替えがキャンセルされたため)。 つまり 昨日19:45にこの写真を本当に撮りました。 地理座標-時間単位の座標(hh.mm.ss.ms)。 つまり、座標の最初の行では、55時間、48分、22秒、830ミリ秒です。 たとえば、Yandexマップを使用してこの場所を見つけるには、座標を必要な形式に変換します:55.48.22.830 = 55 + 48/60 + 22/3600 + 830/3600000 =〜55.806342(小数点第6位まで切り上げ)。 地理的な幅についても同じです:37.24.22.51 = 37 + 24/60 + 22/3600 + 510/3600000 =〜37,406253。 結果の値-37.406253,55.806342-をYandex.Mart検索バーに入力し、結果を取得します: maps.yandex.ru/?text=37.406253%2C55.806342&sll=&sspn=&z=&source=form
uC / GUIグラフィックスライブラリを使用して、この例をさらに開発できます。 グラフィックスピードメーターを表示します(同時に、stm32 ADCへの抵抗分割器とタコメーターを介してイグニッションコイルに接続します-デジタルカーダッシュボードのようなものが得られます)。
そして、あなたはあなた自身のナビゲーターを作ることができます(そう、簡単ではありませんが、不可能は何もありません):

アーカイブ内のGLCDライブラリには、USER / GLCD / GLCD_UCGUI.cファイルが既にあります。これは、uC / GUIをこのグラフィックスクリーンや他のグラフィックスクリーンに接続するためのインターフェイスです。 インターネット自体にダウンロードuC / GUI難しいことではないと思います。 したがって、この例をより有用なものに発展させるために必要なツールはすべて揃っています。
次の記事では、「スマートホーム」、「スマートカー」の概念を組み合わせたシステムであり、eCall / ERA-Glonassレスキューシステムを含む、自動車と住宅の自動化のためのこの作業のさらなる開発について説明します。
この記事で紹介したKeilのプロジェクトは、 ここからダウンロードできます 。