電子部品および機械部品。
デバイス図。

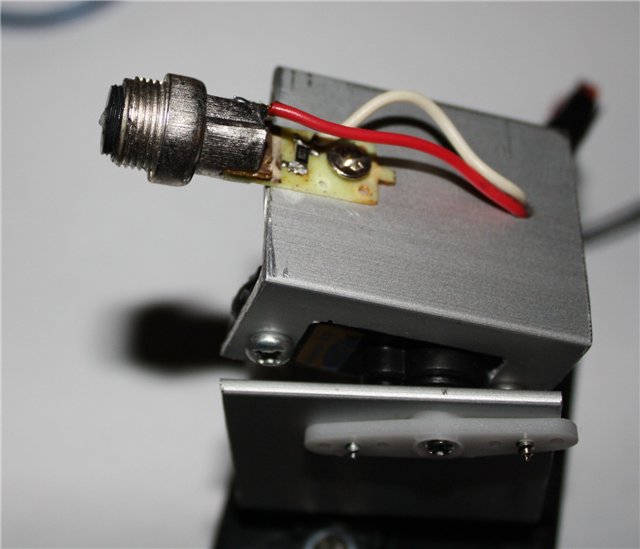
(図1)
レーザーポインターからの光学系を備えたレーザーダイオードをエミッターとして使用しました。 100オームの電流制限抵抗もそれから取得されます。
(図2)
機械部品は、ラジコンモデルストアから購入した2つのCorona CS-928BBサーボで構成されています。 それらは他のものと交換できます。 サーボドライブは次のように相互接続されます。

(図3)
剛性を高めるために、ジョイントは厚さ1.5 mmのアルミニウムコーナーで作られています。
制御トランジスタは、任意の逆導電率にすることができます。 私は自宅でKT805BMのみを見つけ、うまく適用しました。
この回路は、7805スタビライザー(5ボルト、消費電流300 mA以下)を介してネットワーク整流器から給電されます。
ソフトウェア部
サーボは小さな範囲(ストローク全体から60度以内)でランダムに回転して、床上のレーザーバニーの位置を制限するか、わずかに高くします。 短時間のエミッターのプログラムされたシャットダウンも実行されます(猫に興奮を与えるため)。
このコードは、AVRマイクロコントローラーのプログラミングに関するトレーニングコース-Linkから取得しています。
Codevision AVRのプロジェクトファイル、PCBレイアウト、Proteusの回路図、および準備が整ったファームウェアは、ここからダウンロードできます。
プログラムのメインサイクルでは、UARTコマンドを受信するためのコードが残っているため、ファームウェアを簡単に作り直して、コンピューターからデバイスを制御できます。
デバイス操作ビデオ-http://youtu.be/YE37brOZqlc
まあ、実際に猫とのビデオ
猫は喜んでいます!