
ロボットのシャーシにお金がないため、私は最も安くて簡単にすることにしました。 感覚器官として超音波距離計が選ばれました。

アイデア
私は自分のアルドゥインのために安くて作りやすいプラットフォームを作りたかった。
ラジコンジープを使用しようとしましたが、モーターシールドの電力が通常の動作に十分ではありませんでした(偶然エンジンドライバーを火傷しました)4つのトランジスタで構成されるhブリッジが必要でした。 おもちゃのスキームを理解するのは面倒でした(そして、私はそれを壊したくはありませんでした)が、それをはんだ付けするには、祖国の大箱を調べてトランジスタを探す必要がありました。
私が自由に使えるのは、いくつかのモーター、アルミニウム板のスクラップ、ソビエトの金属製造業者でした。
設計
インターネットを旅して、車輪もトラックも持たず、最も重要なことにはギアボックスのないビームロボットに出くわしました。
全体の秘密はモーターにあり、モーターは床に対して斜めに配置されていました。 ロボットはシャフトの上に立っていました。
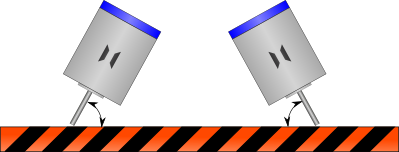
これにより、ギア比、エンジン出力を心配する必要がなくなります。 モーター自体は、シャフトの直径が小さいため、ギアボックスです。
建物
フレーム
モーターホルダーをアルミニウムシートから切り取り、デザイナーからフレームに取り付けて、arduinoホルダーをネジ止めしました。 複雑なことはなく、ドレメル、ドライバー、最大15分の時間です。
エレクトロニクス
前述のように、arduinoはモーターシールドを介してモーターを制御し、マイクロプロセッサーを焼かないように別々の電源を備えています。 その後、シャットダウンボタンを追加しました。 超音波距離計SRF05がボードに接続されています。 彼は2つのモードでの作業方法を知っているので、詳しくは説明しません。最初のモードでは、2つの連絡先(音声を送信するためのトリガー、2番目のデータ受信)、および彼が選択した2番目のトリガーをそれぞれ使用する必要があるとしか言えません。 センサー用のアダプターがはんだ付けされました。これには、2番目のモード(接地1接点)のセンサーが含まれていました。
プログラミング
以下のビデオは、最も単純なアルゴリズムを示しています。 ここで、より意味のあるコードを示します。 コメントにはコメントがあります。
アルゴリズムは次のとおりです。
1)軸を中心に回転し、最大距離を見つける
2)最大距離に向かって曲がる
3.1)方向転換できる場合は、ある時点までまっすぐ進みます
3.2)前進できなかった場合
4.1)スタックしている場合(前進しますが、距離は変わりません)、後退してポイント1に戻ります
4.2)壁に到達したら、停止してポイント1に戻ります
ソース:
#include <AFMotor.h> #define MaxRange 23 // #define MaxTries 3 // int srfPin = 16; // Pin for SRF05 int ledPin = 2; // AF_DCMotor motorL(2); AF_DCMotor motorR(1); boolean isInRange(int value,int leftBorder,int rightBorder){ return (value>leftBorder && value<rightBorder); } // int getDistance(){ delay(50); int duration=0; // pinMode(srfPin, OUTPUT); digitalWrite(srfPin, LOW); // , delayMicroseconds(2); digitalWrite(srfPin, HIGH); // 10 delayMicroseconds(10); digitalWrite(srfPin, LOW); // pinMode(srfPin, INPUT); duration = pulseIn(srfPin, HIGH); // return duration/58; // } // void goForward(){ motorL.setSpeed(255); motorR.setSpeed(255); motorL.run(FORWARD); motorR.run(FORWARD); } void goBackward(){ motorL.setSpeed(255); motorR.setSpeed(255); motorL.run(BACKWARD); motorR.run(BACKWARD); } void turnLeft(){ motorL.setSpeed(255); motorR.setSpeed(255); motorL.run(BACKWARD); motorR.run(FORWARD); } void turnRight(){ motorL.setSpeed(255); motorR.setSpeed(255); motorL.run(FORWARD); motorR.run(BACKWARD); } void stopMovement(){ motorL.run(RELEASE); motorR.run(RELEASE); } // int getMaxDistanseAround(){ unsigned long timeStart=millis(); int maxFound=0; // if(random(100)<50){turnLeft();}else{turnRight();} // while(millis()-timeStart<3000){ int curDistance=getDistance(); if( curDistance > maxFound ){ maxFound=curDistance; } } return maxFound; } // boolean turnToDistance(int distance){ unsigned long timeStart=millis(); // if(random(100)<50){turnLeft();}else{turnRight();} // while(millis()-timeStart<3000){ // // , if( isInRange(getDistance(),distance-5,distance+5)){ // usb Serial.print("Turned to "); Serial.println(getDistance()); // ( ) goBackward(); delay(200); stopMovement(); blinkLed(); return true;// 1, .. } } Serial.println("distance not found"); return false;// } // , float getMySpeed(){ int secToMeas=2; float firstDistance=getDistance(); goForward(); delay(secToMeas*1000); stopMovement(); float newDistance=getDistance(); return (firstDistance-getDistance())/secToMeas/100; } // void blinkLed(){ digitalWrite(ledPin, HIGH); delay(1000); digitalWrite(ledPin, LOW); } float mySpeedSm=0;// /c float mySpeedM=0;// /c void setup() { Serial.begin(9600); // set up Serial library at 9600 bps // .. // randomSeed(analogRead(0)); // , pinMode(ledPin, OUTPUT); Serial.println("Testing systems"); blinkLed(); // getDistance(); if(getDistance()>0){ Serial.println("Ultrasonic sensor ready"); } delay(1000/4); // motorL.setSpeed(255); motorR.setSpeed(255); stopMovement(); blinkLed(); delay(1000/3); Serial.println("Getting averange speed"); blinkLed(); mySpeedSm=getMySpeed(); mySpeedM=mySpeedSm/100; blinkLed(); blinkLed(); blinkLed(); } int tries=MaxTries; // void loop(){ // int maxDist=getMaxDistanseAround(); Serial.print("Found max distance"); Serial.println(maxDist); delay(500); // if(turnToDistance(maxDist)){ tries=MaxTries;// int lastDistance=getDistance(); // while(lastDistance>MaxRange){ goForward(); delay(500); // int newDist=getDistance(); if(isInRange(newDist,lastDistance-2,lastDistance+2)){ goBackward(); delay(1000); lastDistance=0; } else{ lastDistance=newDist; } } }else{ // // tries--; if(tries==0){// - if(getDistance()>MaxRange*2){ goForward(); delay(1000); } else{ goBackward(); delay(1000); } } } stopMovement(); delay(500); }
映像
おわりに
ある晩、簡単なロボットを作ることが本当に可能になります。 もちろん、不完全な点もあります。たとえば、センサーをサーボモーターに掛けて、ワイヤを通常の状態に戻す必要があります。 このロボットをお楽しみください。