隠れマルコフモデルは、モデリングの上記の両方の側面を処理できます。 2段階の確率的プロセスでは、セグメンテーションの情報はモデルの内部状態から取得できますが、データ信号自体の生成は2番目の段階で行われます。
このモデリング技術は、アプリケーションの成功と自動音声認識の分野でのさらなる発展の結果、非常に人気を博しました。 隠れマルコフモデルの研究は、競合するすべてのアプローチを上回っており、主要な処理パラダイムです。 プロセスやシグナルを記述する能力は、長い間成功裏に研究されてきました。 この理由は、特に、人工ニューラルネットワークを構築するための技術が、音声認識や同様のセグメンテーションの問題に使用されることはめったにないためです。 ただし、両方のモデリング手法を活用する隠れマルコフモデルと人工ニューラルネットワークの組み合わせで構成されるハイブリッドシステムが多数あります(セクション5.8.2を参照)。
定義
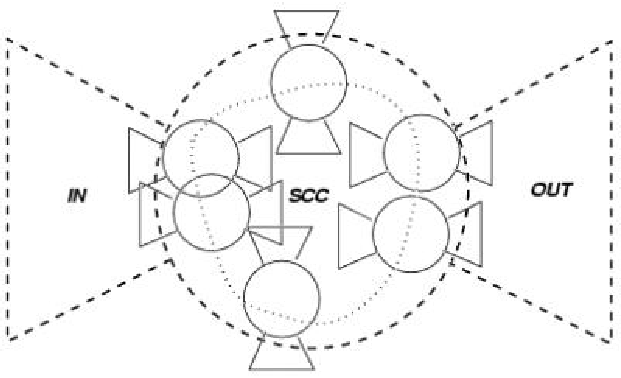
隠れマルコフモデル(SMM)は、2段階の確率過程を記述します。 最初の段階は、静的、原因、および単純な離散確率プロセスで構成されます。 状態空間は有限と見なされます。 したがって、プロセスは、離散状態、有限状態空間への遷移状態を確率的に記述します。 これは、遷移の確率でラベル付けされた状態のペア間の違いを持つ有限状態マシンとして視覚化できます。 所定の時間tでのプロセスの動作は、先行する要素の即時状態のみに依存し、次のように特徴付けることができます。

第2段階では、時間tの各瞬間について、出力または出力によってOtが追加で生成されます。 連想確率の分布はStの現在の状態のみに依存し、以前の状態や出力には依存しません。

出力データのこのシーケンスは、モデルの動作で観察できる唯一のものです。 一方、データ生成中に採用されたシーケンス状態は調査できません。 これは、いわゆる「ステルス」であり、そこから隠れマルコフモデルの定義が導き出されます。 モデルを外部から見ると、つまり、その動作を観察すると、シーケンスを観察する理由として、出力状態Oi、O2 ... OTのシーケンスへの参照が頻繁にあります。 さらに、このシーケンスの個々の要素は、観測結果と呼ばれます。
文献では、SMMの動作を認識するパターンは常に特定の時間間隔Tで考慮されます。この期間の初めにモデルを初期化するには、追加の確率を使用して、時間t = 1での状態の分布の確率を記述します。 原則として、最終状態の同等の基準はありません。 したがって、モデルのアクションは、時刻Tで任意の状態に達するとすぐに最終状態になります。状態の終了をより正確にマークするために、静的基準も宣言的基準も使用されません。
ただし、通常はAで表される1次の隠れマルコフモデルは完全に記述されています。
•状態の有限セットの確立{s | 1 <s <N}。文献では、原則として、インデックスのみが呼び出されます。
•状態遷移確率、マトリックスA

•状態の始まりのベクトルπ

•特定の確率分布の状態
 モデル出力のf
モデル出力のf
ただし、出力の分布は、生成中の出力のタイプに応じて区別する必要があります。 最も単純なケースでは、出力は離散確率分布{O1、O2 ... OM}から生成されるため、シンボリックタイプです。 パラメーターbj(ok)は、離散分布確率を表し、出力データの確率行列にグループ化できます。

このシミュレーション出力の選択により、いわゆるディスクリートSMMが得られます。
の場合、連続確率分布関数に基づいて記述された分布データの出力ではなく、シーケンスxe IRnの値のベクトルが観測されます。
信号解析タスクへのSMMの最新のアプリケーションは、いわゆる連続SMMのみを使用しますが、連続分布をモデル化する必要があるため、解析の複雑さが大幅に増加します。
第5章の翻訳(1段落)
Gernot A. Fink「理論から応用までのパターン認識のためのマルコフモデル」