©A. Green「S色の帆」

Ollieは、人間環境に住んでいるオープンソースの自律型ロボ飛行船です。 Olli-オブザーバー、世界中の研究者。 Ollieが声を聞くと、彼らは非常に親しみやすいことを表現するために興奮して羽ばたきを始めます。 Ollieは、人々について知りたいと彼らの注意を切望します。
Ollieは、DIYアーティスト、アーティスト、デザイナー、および学生がCreative Commons Attribution-ShareAlike 3.0 Unported Licenseの下で利用できます。
OllieはArduinoに脳を持ち、飛行するための翼と聞くためのマイクを持っています。 このチュートリアルでは、Ollieの作成方法を説明します。 質問、提案、ツイートなどをhttp://www.meandollie.com/に送信してください 。 よろしくお願いします!
ステップ1.コンポーネントを組み立てます
主なコンポーネント:
- 1 Arduino Pro Mini 328-5V / 16MHz
- Arduino Pro Mini用のFTDIケーブルまたは電源ボード1本
- 1つの電子マイク
- ポリマー850-900mAhリチウムイオン電池1個
- 3.6gの2つのマイクロサーボ(このプロジェクトでは青い矢印が使用されました)
- メーターマイラー(フォイル)ボール
- ワイヤd = 0.255mm /ラップアラウンドインストール用の2-3色ワイヤ
- 1つのLED
- 翼用マイラーまたはホイル1枚
- ウィングフレーム用ワイヤースプール1個
- ヘリウムまたはそれにアクセスできる1つのシリンダー
- 1スイッチ
- 3.9KΩで1個の抵抗
- 1 4.7K抵抗
追加アイテム:
- Arduino Unoまたはその他(テスト用)
- ブレッドボード
- 線径0.644mmまたは0.511mm
- 電気テープ
- 小規模
- はんだごてとはんだ
- エポキシ接着剤
- 接着剤サーマルガン
- 粘土または粘土
- 小さなカップ
- カッター
ステップ2.支払い
ステップ3.翼を作る


ワイヤーを曲げて、翼の2つの同一のスケルトンを取得します。 それらを大きくしすぎて重量を最小限にしないでください。ただし、Ollieは飛ばなければなりません。 両端を固定するには、エポキシ接着剤を使用します。
サーボマウントを翼の端に取り付け、エポキシ接着剤で絶縁します。 追加の断熱が必要な場合は、ダクトテープを使用してください。
スケルトンの表面に「フィット」するために、マイラーまたはホイルから同一の形状を切り取ります。 接着剤を使用して固定します。 飛行中に翼が半球形になるように、翼の骨格をきつく締めすぎないでください。
翼をサーボに取り付けます。 次に、ワイヤをドライブに取り付けます。
ステップ4.エンジンを使用する


サーボ制御線をブレッドボードのデジタルピン2および4〜5Vの電源とアースに接続するか、Arduino Uno(テスト用)に接続します。
基本プログラムをダウンロードして、配線が機能していて、翼が同じ速度で動いていることを確認します。
翼が動かない場合は、回路の連続性を確認し、接続を分離して、ドライブを再起動します。 回路が正常に機能する場合、Arduino Mini Proへの接続の準備をします。
サーボを小さなプラスチックカップに挿入します(翼をボールに取り付けてモーターをマスクするのに役立ちます)。 翼の動きを邪魔しないようにしてください。
ステップ5.飛行船に翼を取り付ける


翼が取り付けられる場所で、長さ1メートルのマイラーボールをマークします。 飛行中の飛行船のバランスを取るために、マークはボールの反対側に直接配置する必要があります。
グルーガンを使用して、マイラーフィルムでカップを覆います。
次に、ボールをヘリウムで満たします。
次に、電気テープを使用してサーボカップをボールに固定します。 ワイヤを緩めます。
絶縁テープをマイラーフィルムで覆った後。
ステップ6.マイクを接続する
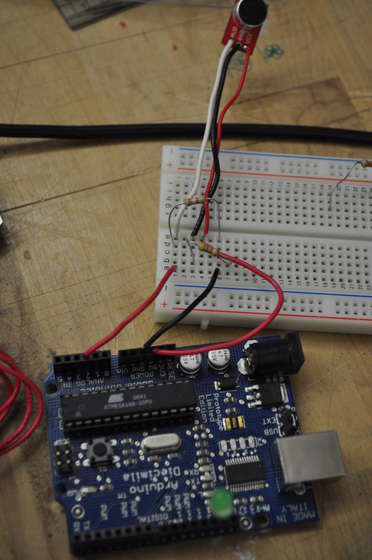
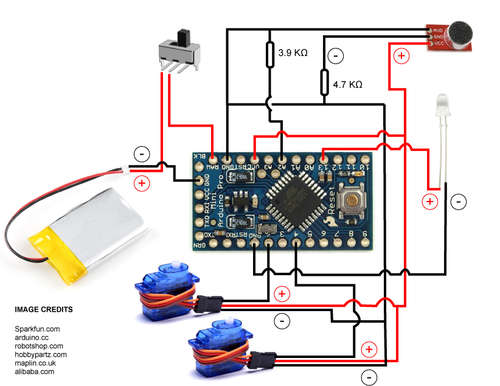
図に示すように、2つの抵抗器3.9Kと4.7Kを使用して、マイクをArduino Unoに接続します。 制御線は、Arduinoのアナログピン2に接続する必要があります。 抵抗はマイク信号を増幅するために使用されるため、必ず正しく接続してください。
LEDをArduinoの13番目のデジタルピンに接続します。
絶縁を確認してください。
Arduinoでこの(http://pastebin.com/xVXSEQYs)プログラムを実行して、接続が正しく機能することを確認します。 オーディオ信号が特定のしきい値を超えると、LEDが点灯します。 しきい値は、通常の音または大きな音に対応する必要があります。 LEDが点灯しない場合は、すべてが正しく接続されていることを確認し、プログラムの定数で「遊んで」ください。
ステップ7.組み立て

スキームに従ってすべてを接続します。 スイッチとバッテリーを回路基板に取り付けます。 ワイヤーをはんだ付けし、ホットグルーで絶縁します。
FTDIケーブルまたはアダプターカードを使用して、Arduino Pro Miniにプログラム(http://pastebin.com/crtvLn1w)をダウンロードします。
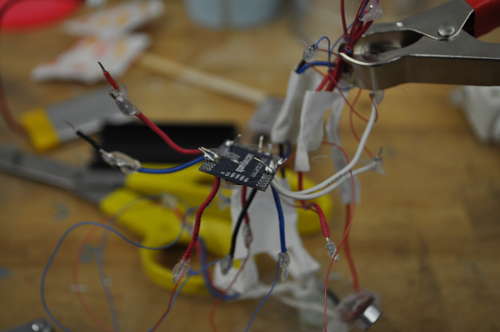
配線図に従って、Arduino Pro Mini接続を非常に慎重にはんだ付けします。
少量のフォイルまたは電気テープを使用して、ボードをボールの底に固定します。
現時点では、ボールがボールを持ち上げられるように、または少なくともボールのバランスを保つために、ボードは十分に軽くなければなりません。 ボードが軽すぎる場合は、粘土で重量を追加します。
ステップ8. Ollieは飛ぶ!

Ollieは飛ぶ準備ができています。 スイッチをオンにして、バッテリーのArduino Pro Miniに電力を供給します。 Ollieは、声や大きな音が聞こえると、羽ばたきします。 さて、Ollieは彼女の翼で周りの人々に喜びと幸福をもたらします。
独自の実験、ツイート、提案、希望、コメントをwww.meandollie.comに送信してください。 Ollieは新しい友達を作るのが大好きです。
ステップ9.役に立つヒント
すべてが重量を追加するため、使用する素材に注意してください。 重量が十分でない場合は、たとえば粘土を使用できます。
850-900mAhポリマーリチウムイオンバッテリーがない場合、交換する必要があるのは18.5g以下です。
ヘリウムはマイラーボールから非常にゆっくりと離れるため、Ollieは給油せずに1.5〜2日間飛行できます。
接続する前に、ブレッドボードまたはArduino Unoの回路を確認するか、Arduino Pro Miniにはんだ付けしてください。
Arduino Pro Miniをはんだ付けするときは注意してください。チップは非常に簡単に焼けます。
サーボを確認し、翼が正しい方向に向けられていること、およびそれらがミラー方向に動いていることを確認します。
Ollieが飛行する部屋で必要な場合は、コードを変更します。