だから、ポイントに右。
Viola Jonesメソッドの説明
この方法の基礎となる基本原則は次のとおりです。
- 画像は積分表現で使用され、必要なオブジェクトをすばやく計算できます。
- Haarの兆候が使用され 、その助けを借りて、目的のオブジェクト(このコンテキストでは、顔とその機能)の検索が行われます。
- ブースティングを使用して(英語から。 ブースト -改善、ゲイン)、画像の特定の部分の目的のオブジェクトに最適な機能を選択します。
- すべての符号は分類器の入力に送られ、結果は「true」または「false」になります。
- 機能のカスケードは 、顔が見つからないウィンドウをすばやくドロップするために使用されます。
分類子のトレーニングは非常に遅くなりますが、顔検索の結果は非常に高速です。そのため、画像内のこの顔認識方法が選択されました。 Viola Jonesは、認識効率/速度の比で最高の1つです。 また、この検出器は、顔の誤検出の可能性が非常に低いです。 アルゴリズムはうまく機能し、わずか約30度までの角度で顔の特徴を認識します。 傾斜角が30度を超えると、検出の割合が急激に低下します。 また、これにより、標準的な実装では、任意の角度で人の向きを変えた顔を検出できず、ニーズの増大を考慮して、現代の生産システムでアルゴリズムを使用することが非常に複雑または不可能になります
Viola-Jonesアルゴリズムが基づいている原則の詳細な分析が必要です。 この方法は、一般に、スキャンウィンドウの一般原則に従って、顔と顔の特徴を探します 。
スキャニングウィンドウの原理
一般に、デジタル画像で人物の顔と顔の特徴を検出するタスクは、次のようになります。
- 目的のオブジェクトがあるイメージがあります 。 これは、サイズw * hのピクセルの2次元マトリックスで表され、各ピクセルの値は次のとおりです。
-白黒画像の場合は0 255
。
-カラーイメージ(コンポーネントR、G、B)の場合0 255 3
。 - 作業の結果として、アルゴリズムは顔とその特徴を決定し、それらをマークする必要があります -検索は、検出された顔とその特徴が説明されている助けを借りて、 長方形の記号で画像のアクティブな領域で実行されます:
rectangle i = {x,y,w,h,a},
(1.1)
ここで、x、yはi番目の長方形の中心の座標、wは幅、hは高さ、aは画像の垂直軸に対する長方形の傾斜角です。
つまり、図面や写真に関しては、スキャンウィンドウに基づくアプローチが使用されます。画像は検索ウィンドウ(いわゆるスキャンウィンドウ)によってスキャンされ、その後、分類子が各位置に適用されます。 トレーニングシステムと最も重要な機能の選択は完全に自動化されており、人間の介入を必要としないため、このアプローチは迅速に機能します。
この原理を使用して画像内の顔を見つけて見つけるタスクは、特徴的な特徴を認識する方法の次のステップであることがよくあります。たとえば、認識された顔で人を確認したり、表情を認識したりします。
統合された画像表現
データを使用してアクションを実行するために、Viola-Jonesメソッドでは画像の積分表現 [3]が使用されます。 この表現は、他の方法、例えば、ウェーブレット変換、SURF、および他の多くの解析されたアルゴリズムでしばしば使用されます。 統合された表現により、特定の画像内の任意の長方形の合計輝度をすばやく計算できます。長方形が何であっても、計算時間は一定です。
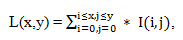
画像の積分表現は、元の画像と同じサイズの行列です 。 その各要素には、この要素の左と上のすべてのピクセルの強度の合計が格納されます 。 マトリックス要素は、次の式を使用して計算されます。
 (1.2)
(1.2)
ここで、I(i、j)は元の画像のピクセルの明るさです。
行列L [x、y]の各要素は、(0,0)から(x、y)までの長方形のピクセルの合計を表します。 各ピクセル(x、y)の値は、指定されたピクセル(x、y)の左と上のすべてのピクセルの値の合計に等しくなります。 行列の計算には、画像のピクセル数に比例した線形時間がかかるため、統合された画像は1回のパスで計算されます。
マトリックスの計算は、式1.3によって可能です。
L(x,y) = I(x,y) – L(x-1,y-1) + L(x,y-1) + L(x-1,y)
(1.3)
このような積分行列を使用すると、任意の長方形、任意の領域のピクセルの合計を非常にすばやく計算できます。
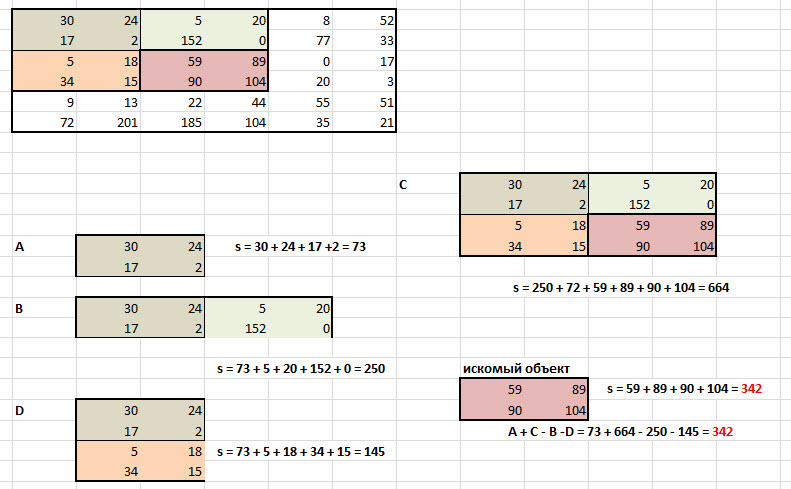
長方形ABCD内のオブジェクトDに関心があるとします。
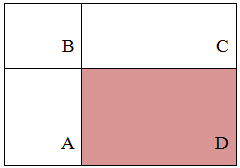
この図から、長方形内の合計は、次の式に従って隣接する長方形の合計と差で表現できることが明らかです。
S(ABCD) = L(A) + L() — L(B) — L(D)
(1.4)
おおよその計算ミスを次の図に示します。
ハールの兆候
符号はマッピングf:X => D fです 。ここで、D fは符号の許容値のセットです。 符号f 1 、...、f nが与えられた場合、符号x =(f 1 (x)、...、f n (x))のベクトルはオブジェクトx∈Xの特性記述と呼ばれます。 特性記述はオブジェクト自体で識別することができます。 さらに、集合X = D f1 * ... * D fnは、特徴空間[1]と呼ばれます。
記号は、集合D fに応じて次のタイプに分類されます。
- バイナリ記号、D f = {0,1};
- ノミナル属性:D f-有限集合。
- 順序属性:D f-有限順序セット。
- 量的属性:D f-実数のセット。
当然、兆候の種類が異なる問題が適用されますが、すべての方法がそれらを解決するのに適しているわけではありません。
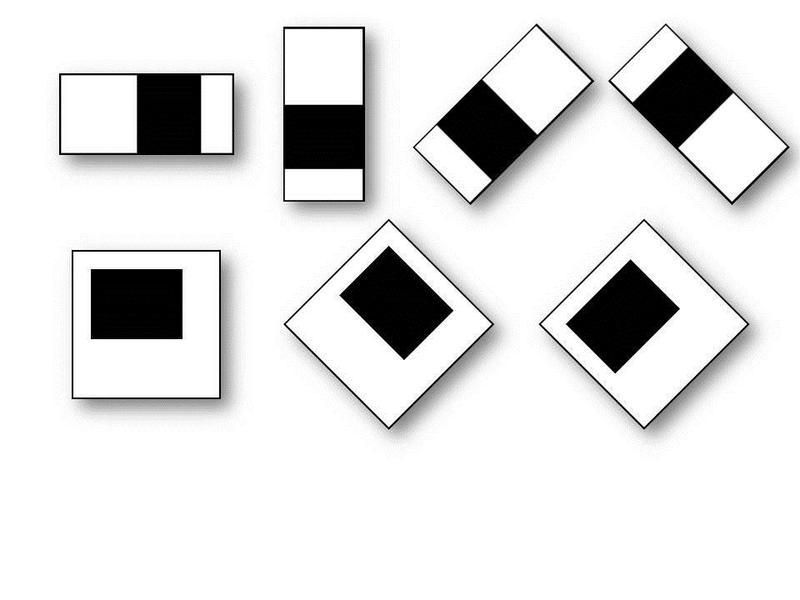
標準のViola-Jonesメソッドでは、下図に示す長方形の特徴が使用されます。これらはHaarプリミティブと呼ばれます:
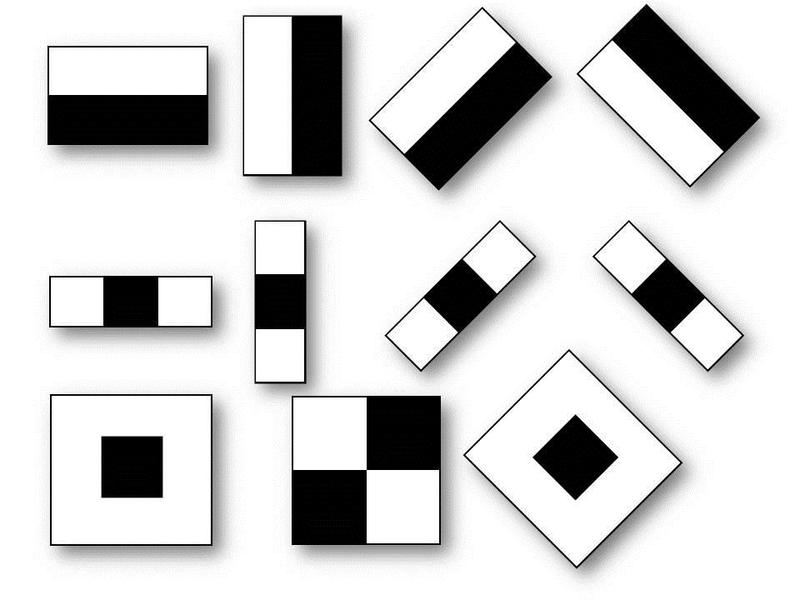
OpenCVライブラリで使用される高度なViola-Jonesメソッドでは、追加機能が使用されます。
そのような機能の計算値は
F = XY
、(1.5)
Xは記号の明るい部分で閉じた点の輝度値の合計であり、Yは記号の暗い部分で閉じた点の輝度値の合計です。 それらを計算するには、前述の統合画像の概念を使用します。
Haarの符号は、それぞれX軸とY軸に沿った輝度の差のポイント値を示します 。
ウィンドウスキャン
プログラムのスキャンウィンドウの視覚化:
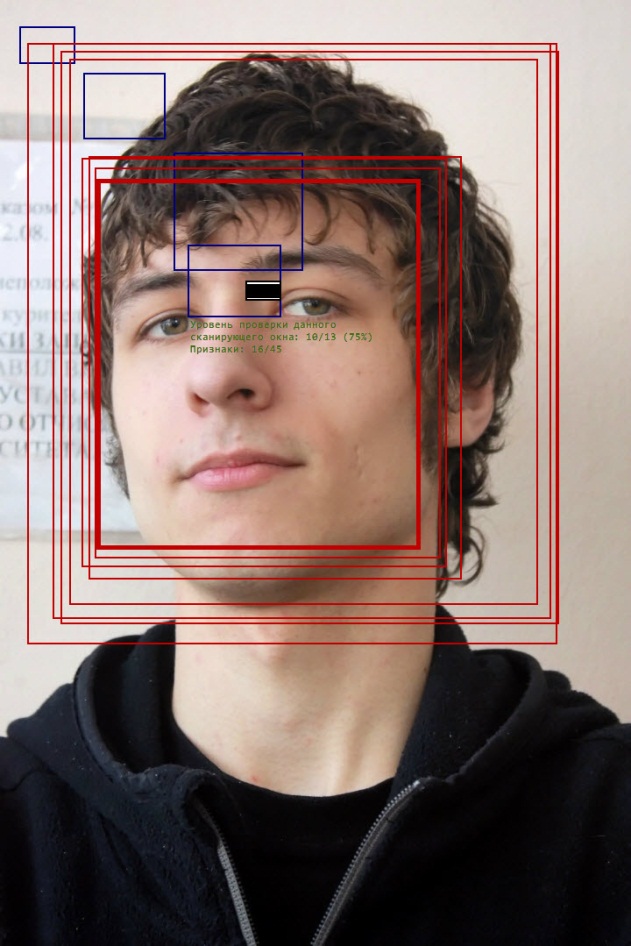
標識を使用してウィンドウをスキャンするアルゴリズムは次のようになります。
- 調査対象の画像があり、スキャンウィンドウが選択され、使用されている機能が選択されている。
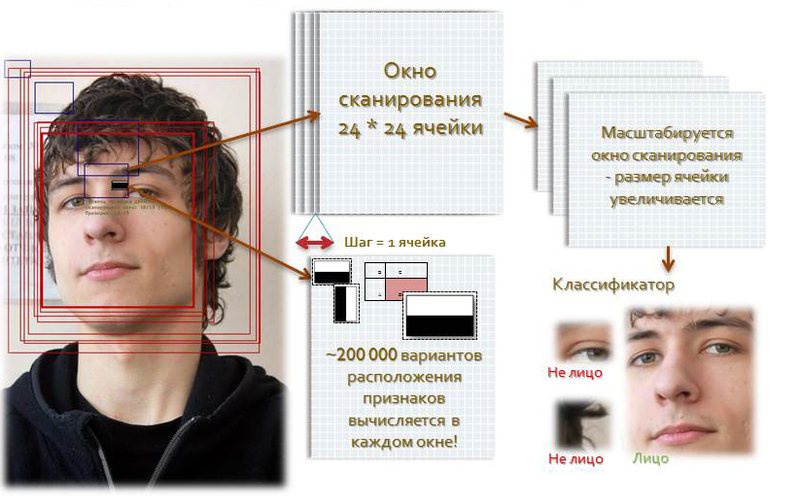
- さらに、スキャンウィンドウは、1ウィンドウセル単位で画像内を順番に移動し始めます(たとえば、ウィンドウ自体のサイズは24 * 24セルです)。
- 各ウィンドウで画像をスキャンする場合、スキャンウィンドウ内のサインのスケールと位置を変更することで、サインの場所に関する約200,000のオプションが計算されます。
- スキャンはさまざまなスケールで順次実行されます。
- 画像自体は拡大縮小されませんが、スキャンウィンドウ(セルサイズが変更されます)。
- 見つかったすべての兆候は、「判定を下す」分類子に分類されます。
低電力デスクトップPC上のすべての兆候を計算する検索プロセスは、単純に非現実的です。 したがって、分類子は、すべての属性の 特定の必要なサブセットにのみ応答する必要があります 。 特定のサブセットで個人を見つけるために分類器を訓練する必要があることは完全に論理的です。 これは、コンピューターを自動的にトレーニングすることで実行できます 。
アルゴリズムで使用される機械学習モデル
機械トレーニングは、モジュールによって新しい知識を獲得するプロセスです。 このプロセスには認識されている定義があります。
「機械学習は、作業中に自動的に改善されるコンピューターアルゴリズムを研究する科学です。」(Michel、1996)。 以下は機械学習プロセスです。
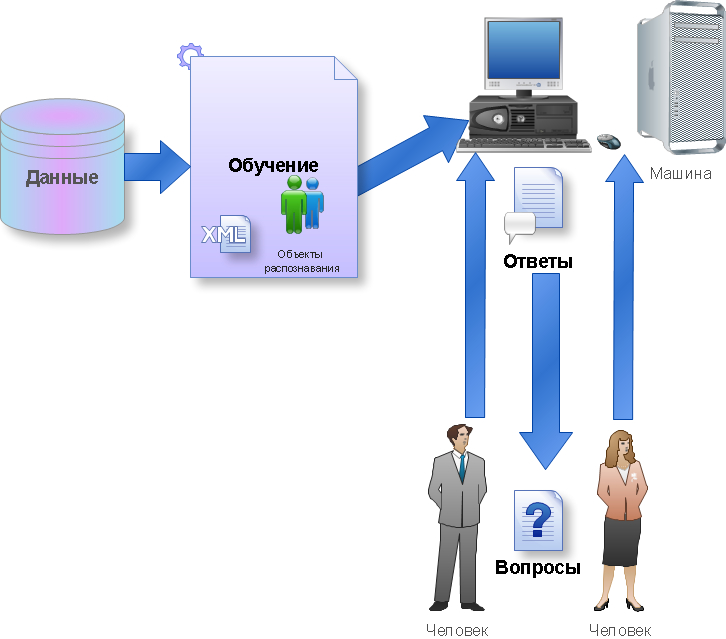
このプロセスは、機械学習に加えて、データベース理論、人工知能、アルゴリズム化、パターン認識などの分野を含む、 データマイニング (情報マイニングとデータマイニング)と呼ばれる概念と技術の一部です。
Viola-Jonesメソッドの機械学習は、 分類などの問題を解決します。
Viola-Jonesメソッドの分類器トレーニング
アルゴリズムのコンテキストでは、いくつかの方法でクラスに分割された多くのオブジェクト(画像)があります。 画像の有限セットが与えられ、そのクラスがどのクラスに属しているかがわかります(たとえば、「鼻の正面位置」のクラスなど)。 このセットはトレーニングセットと呼ばれます。 残りのオブジェクトのクラス所属は不明です。 初期セットから任意のオブジェクトを分類できるアルゴリズムを構築する必要があります[4]。
オブジェクトを分類するとは、このオブジェクトが属する番号(またはクラス名)を示すことです。
オブジェクトの分類 -この特定のオブジェクトへの適用の結果として分類アルゴリズムによって発行されたクラス番号または名前。
分類子 -分類問題では、これはこのオブジェクトが属するクラスを決定する近似関数です。
トレーニングセットは、有限数のデータです。
機械学習では、分類タスクは、クラスが分割されたときに 教師と一緒に学習するセクションを指します。 パターン認識は、本質的に画像と信号の分類です。 識別と顔認識のためのViola-Jonesアルゴリズムの場合、分類は2クラスです。
分類は次のとおりです。
X-オブジェクトの説明が格納されるセット、Y-クラスに属する数値の有限セットがあります。 それらの間には関係があります-マッピングY *:X =>Y。トレーニングサンプルは
X m = {(x 1 ,y 1 ), …, (x m ,y m )}
ます。 関数fは、特徴ベクトルXから構築されます。これは、Xの可能な観測値に対する回答を提供し、オブジェクトx∈Xを分類することができます。 この単純なルールは、新しいデータに対してうまく機能するはずです。
アルゴリズムで使用されるAdaBoostのブースティングと開発
このような複雑なトレーニングの問題を解決するために、 ブースティングテクノロジーがあります。
ブースティングは、分析モデルの精度向上に寄与する複雑な方法です。 分類エラーをほとんど許容しない効果的なモデルは、 「強力な」 モデルと呼ばれます。 逆に、 「弱」では、クラスを確実に分離したり、正確な予測をしたりすることができず 、作業に多くのエラーが生じます。 したがって、 ブースティング (英語から。ブースティング-増加、強化、改善)は、文字通り「弱い」モデルの「強化」を意味します [5]は、後続の各アルゴリズムが以前のすべてのアルゴリズムの構成の欠点を補おうとするときに、機械学習アルゴリズムの構成を順次構築するための手順です。
ブースティングのアイデアは、90年代後半にRobert Schapireによって提案されました[6]。1つを得るために、多くの悪い(ランダムとは少し異なる)学習アルゴリズムを持つという問題の解決策を見つける必要がありました。 このような考え方の基礎は、 カスケードと呼ばれる分類器のチェーン(アンサンブル)の構築です[5、6]。 カスケードは 、それぞれ(前者を除く) 前のミスから学習します。 たとえば、Boost1の最初のブースティングアルゴリズムの1つは3つのモデルのカスケードを使用し、1つ目はデータセット全体でトレーニングされ、2つ目はサンプルのサンプルでトレーニングされ、その半分が正解、3つ目が「回答」の例で最初の2つは別れました。 したがって、分類子のカスケードによる例の順次処理があり、各後続のタスクがより困難になります。 結果は単純な投票によって決定されます。この例は、カスケードのほとんどのモデルによって発行されたクラスを参照しています。
ブースティングは、 貪欲なアルゴリズム 、つまり貪欲なアルゴリズムです。最終的なソリューションが最適になることを期待して、各ステップでローカルに最適な選択を行うアルゴリズムです。 決定木のブースティングは、分類品質の観点から最も効果的な方法の1つと見なされます。 多くの実験で、組成が大きくなるにつれて、独立した試験サンプルでエラー率のほぼ無限の減少が観察されました。 さらに、テストサンプルの品質は、トレーニングサンプル全体のエラーのない認識を達成した後でも改善され続けることがよくありました。 これは、一般化能力を高めるためにアルゴリズムの複雑さを制限する必要があるという長年の信念を覆しました。 ブーストの例を使用して、 任意に複雑なコンポジションが適切に調整されていれば、品質が良いことが明らかになりました[5]。
数学的には、ブースティングは次のとおりです。
セットXおよびYに加えて、推定空間と呼ばれる補助セットRが導入されます。 重ね合わせa(x)= C(b(x))の形式のアルゴリズムを考えます。ここで、関数b:X→Rはアルゴリズム演算子と呼ばれ、関数C:R→Yは決定規則です。
多くの分類アルゴリズムには、そのような構造があります。最初に、オブジェクトのクラスへの所属の推定値が計算され、次に決定ルールがこれらの推定値をクラス番号に変換します。 評価の値は、原則として、分類の信頼度を特徴付けます。
アルゴリズム合成-a :X→Y形式のアルゴリズム
a(x) = C(F(b 1 (x), . . . , b T (x)), x ∈ X
(1.6)
アルゴリズム演算子b t :X→R、t = 1、...、T、修正操作F:R T →R、および決定規則C:R→Yで構成されます。
基本的なアルゴリズムは、関数a t (x)= C(b t (x))を示し、固定決定規則Cの場合、演算子b t (x)自体を示します。
フォームF(b 1 、...、b T )の重ね合わせは、XからRへのマッピングです。つまり、アルゴリズム演算子です。
2つの互いに素なクラスに分類する問題では、通常、実数のセットが推定のスペースとして使用されます。 決定的なルールには構成可能なパラメーターがあります。 そのため、Viola-Jonesアルゴリズムでは、 しきい値決定ルールが使用されます。ルールとして、演算子は最初にゼロ値で構築され、次に最適値が選択されます。 基本アルゴリズムのシーケンシャルトレーニングのプロセスは、おそらく、ほとんどの場合、コンポジションの構築に使用されます。
シャットダウン基準は、タスクの詳細に応じて異なる方法で使用できますが、いくつかの基準を一緒に使用することもできます。
- 所定の数の基本アルゴリズムTが構築されます。
- トレーニングセットのセット精度が達成されます。
- 制御サンプルで達成された精度は、特定のアルゴリズムパラメータを使用して過去数ステップにわたって改善することはできません。
このアプローチの開発は、1999年にJoab FreundとRobert Schapireによって提案されたAdaBoostブースティングアルゴリズム ( 適応ブースティング )のより高度なファミリの開発でした[9]。例、異なるステップで交互に適用します。
分類問題を2つのクラスY = {−1、+ 1}に考えます。 たとえば、基本的なアルゴリズムも-1と+1の2つの回答のみを返し、決定ルールは固定されています:C(b)= sign(b)。 目的のアルゴリズム構成は次の形式をとります。
 (1.7)
(1.7)
組成Q tの機能の機能は、トレーニングセットでエラーの数として定義されます。
 (1.8)
(1.8)
ここで、W l =(w 1 、...、w l )はオブジェクトの重みのベクトルです。
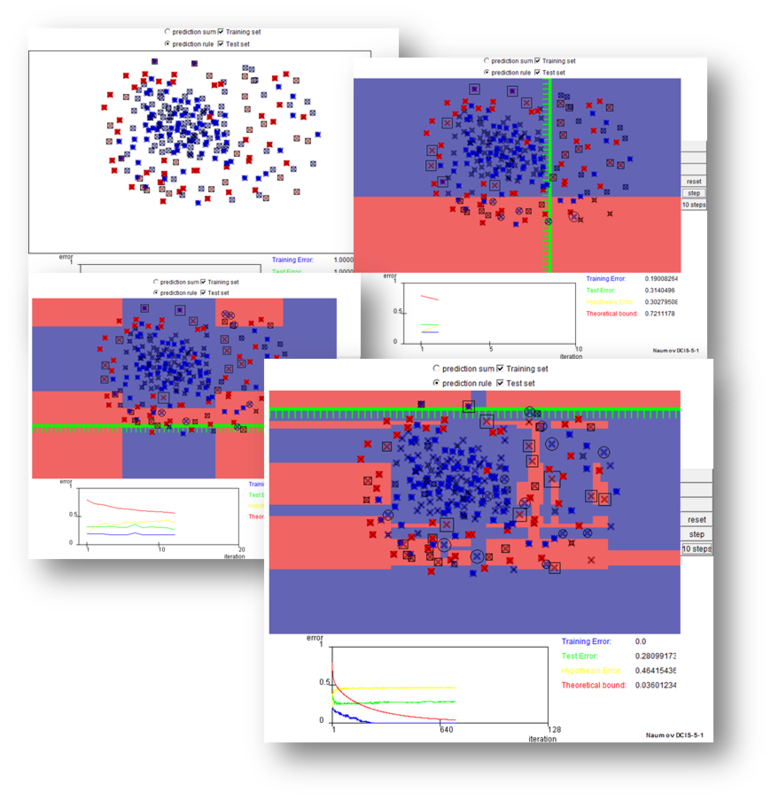
AdaBoosting問題を解決するには、しきい値損失関数[z <0]の指数近似が必要です。指数E z = e -z (以下のAdaBoostの動作を示す図を参照)。
したがって、 一般的な適応ゲインアルゴリズム、AdaBoostは次のとおりです。
:
Y = {−1,+1}, b 1 (x), . . . , b T (x) −1 + 1, X l – .
-
:
Y = {−1,+1}, b 1 (x), . . . , b T (x) −1 + 1, X l – .
-
:
Y = {−1,+1}, b 1 (x), . . . , b T (x) −1 + 1, X l – .
-
:
Y = {−1,+1}, b 1 (x), . . . , b T (x) −1 + 1, X l – .
:
Y = {−1,+1}, b 1 (x), . . . , b T (x) −1 + 1, X l – .
:
1. :
w i := 1/ℓ, i = 1, . . . , ℓ; (1.9)
t = 1, . . . , T, :
2 .  (1.10)
(1.10)
2 .  (1.11)
(1.11)
3. . .  , b t , , b t x i . , , :
, b t , , b t x i . , , :
 (1.12)
(1.12)
4. :
 (1.13)
(1.13)
準備段階、2番目のステップ、12番目と642番目のAdaBoostの実装を図に示します。 特定の数の基本的なアルゴリズム(たとえば数十)を構築した後、オブジェクトの重みの分布を分析する必要があります。 最大の重みw iを持つオブジェクトは、おそらくサンプルから除外されるべきノイズ放射であり、その後、再び構成を構築し始めます。
AdaBoostの利点:
- 優れた一般化能力。 実際の問題では、基本的なアルゴリズムよりも品質の優れたコンポジションがほとんど常に作成されます。 基本アルゴリズムの数が増えると、一般化機能が向上する場合があります。
- 実装の容易さ。
- ブースティング自体のオーバーヘッドはわずかです。 コンポジションを構築する時間は、基本的なアルゴリズムを学習するのにかかる時間によってほぼ完全に決まります。
- ノイズ放射であるオブジェクトを識別する機能。 これらは最も「難しい」オブジェクトx iであり 、そのために、構図を構築する過程で、重みw iが最大の値を取ります。
AdaBoostの短所:
- データに大きなノイズレベルがある場合、再トレーニングが行われます。 指数関数的損失関数は、多くの基本的なアルゴリズムが誤っている「最も難しい」オブジェクトの重みを大きくしすぎます。 ただし、ほとんどの場合、ノイズ放射であることが判明するのはこれらのオブジェクトです。 その結果、AdaBoostはノイズに同調し始め、再トレーニングにつながります。 この問題は、排出物を除去するか、より「積極的」な損失関数を使用することで解決されます。 特に、GentleBoostアルゴリズムが使用されます。
- AdaBoostには、十分に長いトレーニングサンプルが必要です。 他の線形補正方法、特にバギングは、より小さなデータサンプルから同等の品質のアルゴリズムを構築できます。
- 基本的なアルゴリズムの最適でないセットの構築があります。 構成を改善するために、以前に構築したアルゴリズムに定期的に戻り、それらを再度トレーニングできます。
- ブースティングは、数百のアルゴリズムで構成されるかさばる構成の構築につながる可能性があります。 このような構成は、意味のある解釈の可能性を排除し、基本的なアルゴリズムを格納するために大量のメモリを必要とし、分類の計算にかなりの時間を費やします。
現在、単純な分類器を強化するアプローチは、作業の高速性と効率性、および実装の相対的な容易さのために、一般的でおそらく最も効果的な分類方法です。
開発したアルゴリズムの決定木の原則
決定木は、葉が目的関数の値であるツリーであり、他のノードは、進むエッジを決定する遷移条件(たとえば、顔にスマイルがあります)です。 この観察で条件が真である場合、ライが右側にある場合、左端に沿った遷移が実行されます[4]。 たとえば、次の図にツリーを示します。

決定木を作成するためのアルゴリズムの例を以下に示します。
function Node = _( {(x,y)} ) {
if {y}
return _(y);
test = __( {(x,y)} );
{(x0,y0)} = {(x,y) | test(x) = 0};
{(x1,y1)} = {(x,y) | test(x) = 1};
LeftChild = _( {(x0,y0)} );
RightChild = _( {(x1,y1)} );
return _(test, LeftChild, RightChild);
}
//
function main() {
{(X,Y)} = __();
TreeRoot = _( {(X,Y)} );
}
このような決定的なツリーの利点は、可視性、それらとの作業の容易さ、速度です。 また、多くのクラスを持つタスクに簡単に適用できます。
開発したアルゴリズムのカスケードモデル
私の観点から顔を見つけるためのブースティングアルゴリズムは次のとおりです。
1.長方形記号の弱分類器の定義。
2.スキャンウィンドウの移動ごとに、各例で長方形の属性が計算されます。
3.各機能に最適なしきい値が選択されます。
4.最適な兆候と最適なしきい値が選択されます。
5.サンプルは再計量されます。
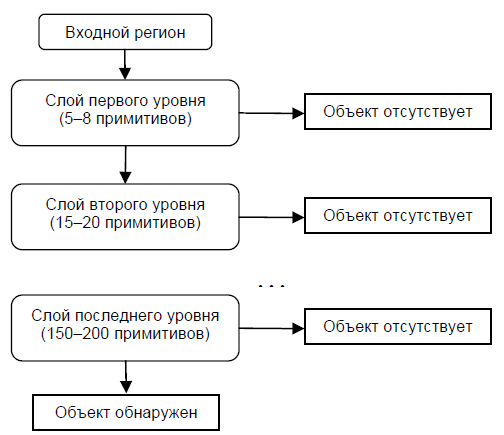
強力な分類器のカスケードモデルは、本質的に同じ決定ツリーであり、各ツリーノードは、関心のあるほぼすべての画像を検出し、画像ではない領域を拒否するように構築されます。さらに、ツリーのノードは、ノードがツリーのルートに近いほど構成されているプリミティブが少なくなるため、決定にかかる時間が短くなるように配置されます。このタイプのカスケードモデルは、検出された画像の総数が少ない画像の処理に適しています。
この場合、メソッドは領域に画像が含まれていないことをすぐに判断し、次の領域に進むことができます。強力な分類子のカスケードモデルの例:
このようなカスケードの学習の複雑さはO(xyz)であり、xステージ、y例、z属性が適用されます。
さらに、カスケードは画像に適用され
ます。1.「単純な」分類子を使用します-この場合、「ネガティブ」ウィンドウの一部は破棄されます。
2.最初の分類器の正の値は、2番目の分類器を開始し、より適応させます。
3.任意の段階で分類子の値が負の場合、次のスキャンウィンドウにすぐに移行し、古いウィンドウは破棄されます。
4.分類子のチェーンがより複雑になるため、エラーがはるかに少なくなります。
このようなカスケードをトレーニングするには、次のアクションが必要です。
1.各ステージの誤り率(これらはトレーニングセットの画像への適用で定量化されるべきプリビュー)の値を設定する-それらが呼び出され、検出および偽陽性率 -検出レベルが高いことが必要であり、偽陽性率のレベルは低いです。
2.計算されたステージのパラメーターが設定レベルに達するまで、記号が追加されます。ここでは、次のような補助的なステップが可能です。
a。 追加の小さなトレーニングセットのテスト。
b。AdaBoostのしきい値は、より多くのオブジェクトを見つけるために意図的に下げられますが、これに関連して、オブジェクトのより多くの不正確な定義が可能です。
3.偽陽性率が依然として高い場合、次のステップまたはレイヤーが追加されます。
4.現在の段階での誤検出は、すでに次のレイヤーまたは段階で否定的なものとして使用されます。
で、より正式なカスケード学習アルゴリズム以下に指定されています。
a) f ( ) d ( )
b) F target
c) P –
d) N –
e) F 0 = 1,0; D 0 = 1,0; i = 0
f) while ( F i > F target )
i = i+1; n i = 0; F i = F i-1
while (F i = f * F i-1 )
n i = n i + 1
AdaBoost(P, N, n i )
F i D i ;
i- , d*D i -1 ( F i ) ;
g) N = Ø;
h) F i > F target , , , N.
結論
Viola-Jonesアルゴリズム(Viola-Jones)の動作メカニズムが詳細に検討されました。この方法を改善し、修正することができます。これは、作成したプログラムで達成しました。これについては、次のトピックで説明します。
参照:
1. P. ViolaおよびMJ Jones、「単純な機能のブーストカスケードを使用した高速オブジェクト検出」、IEEE Conf。コンピュータビジョンとパターン認識(CVPR 2001)、2001
2. P. Viola and MJ Jones、“ Robust real-time face detection”、International Journal of Computer Vision、vol。 57、いいえ。 2、2004
.、pp。137–154 3. R.ゴンザレス、R。ウッズ、「デジタル画像処理」、ISBN 5-94836-028-8、出版社:テクノスフィア、モスクワ、2005。-1072 p。
4. Mestetsky L. M.、「パターン認識の数学的方法」、モスクワ州立大学、モスクワ、モスクワ、2002–2004。、P。 42から44まで
5月Sochman、Jir'ıマタス、«のAdaBoost»、機械知覚センター、チェコ工科大学、プラハ、 2010
6. Yoav Freund、Robert E. Schapire、「ブースティングの簡単な紹介」、Shannon Laboratory、米国、1999年、pp。771-780
PSこの記事の掲載について、昨日プラスになった人々に感謝し、2カルマポイントを獲得したため、この記事をHabraUsersに提出することが可能になりました。良い週末を!