
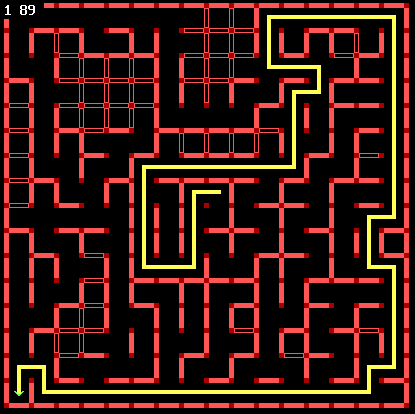
マイクロマウスは、小さなマウスロボットが16x16セルのサイズの迷路の中心への道を見つけるための競争です。 このイベントは、多くの国、特に英国、日本、韓国で人気があります。 ラビリンスは、長さおよび幅が16個の正方形のグリッドで、各正方形の壁のサイズは18 cm、高さは5 cmです。

マウスは、完全に自律的なロボットであり、迷路の中心に向かう必要があります。 これを行うには、彼は自分の場所を追跡し、壁を発見し、迷路を探索する必要があります。 マウスが目標に到達するとすぐに、最初から中心までの最適なルートが見つかるまで、迷路内で逆探索を実行します。 最適なルートが見つかると、マウスはすぐに中心に到達します。
ロボットは毎秒3メートルまで加速できます。 現在、迷路の設計に応じて、ロボットは目標を達成するのに数秒しか必要としません。
マウスはさまざまな検索アルゴリズムを使用できます。 最も一般的なものは、もちろん、 A *とベルマンアルゴリズムのバリエーションです。
この図は、最短経路を見つけるだけでなく、移動の軌跡を最適に計算することも重要であることを示しています。 右上隅では、ロボットは回転する代わりに、余分な回転に時間を無駄にせずに直進します。
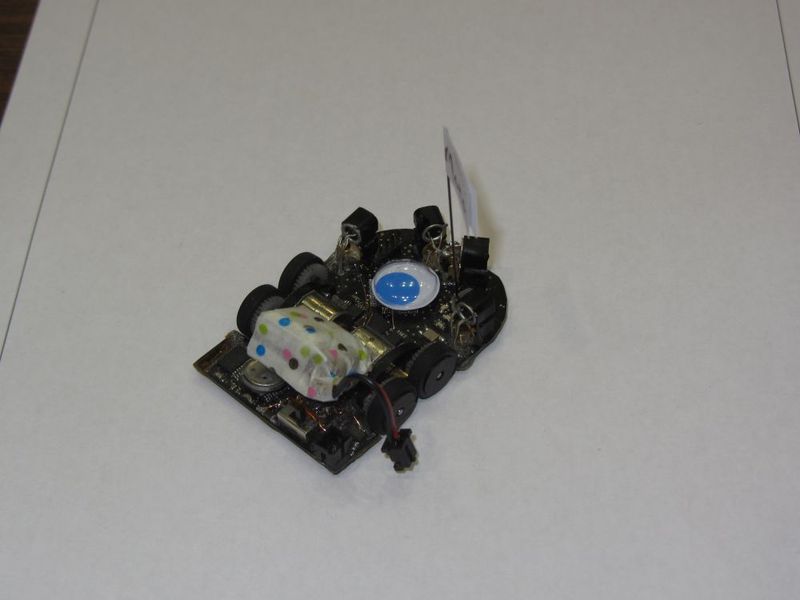
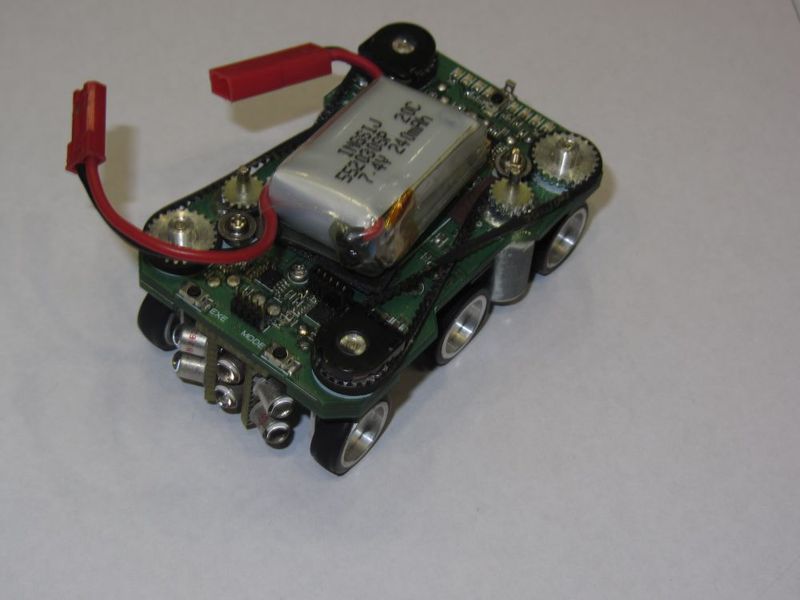
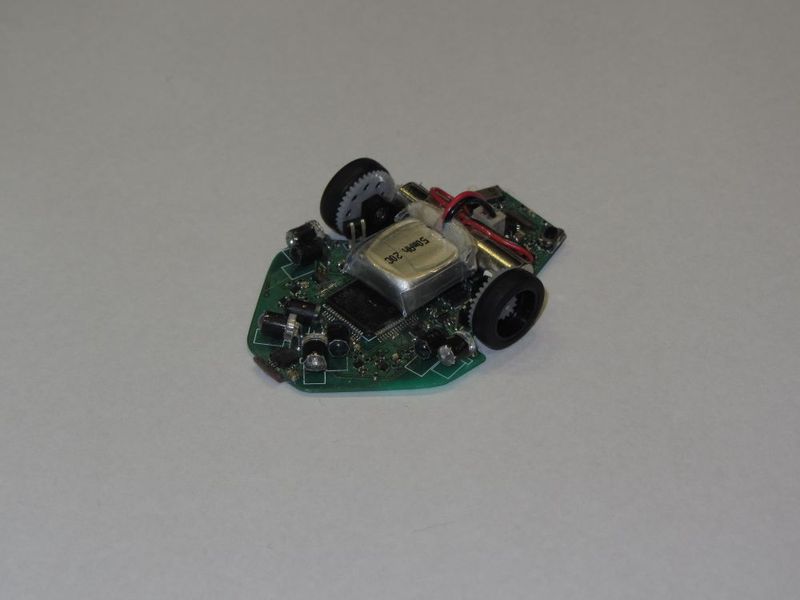
電子マウス自体は異なって見えます:
ビデオでは、ロボットは3.921秒でターゲットに到達します。