はじめに
この段階の主な目標は、I2Cバスのブレッドボードに接続されたMEMSジャイロスコープからデータを取得することでした。 この記事では、何が起こったかをお伝えしたいと思います。 誰に興味があるのか、私はキャット(慎重にトラフィック)の下で尋ねます。
これのために何を得る必要がありましたか?
- 開発ボードSTM32L-DISCOVERY

なぜ選択が彼女にかかったのですか? それは、その時点で入手可能なものと比べて、非常に最適な価格とその機能の比率を持っていたからです。
- MEMSジャイロスコープL3G4200D

3つの軸ジャイロスコープの中ではあまり選択肢がなかったので、これが採用されました。本質はこれが何でどのように機能するかを研究するためだけであったため、これで十分です
- コンデンサと抵抗のペア
このために何をしなければならなかったか
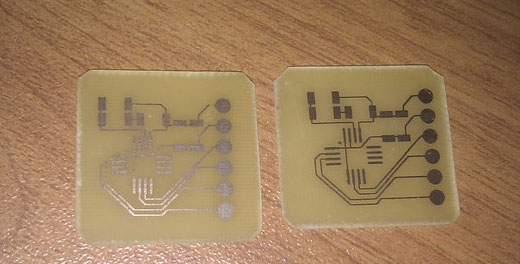
- MEMSジャイロスコープ用のボードを設計する

ジャイロスコープを接続するには、データシートに従って、I2Cバスを介して接続するためのプリント基板を作成する必要がありました。
- それを作ります(念のため2つだけ)
- ストーブのはんだMEMSジャイロスコープ

- はんだコンデンサ、抵抗器、ループ

- この段階で、I2Cには電力用のプルアップ抵抗が必要であることを思い出しました。見た目を無視しなければなりませんでした:(
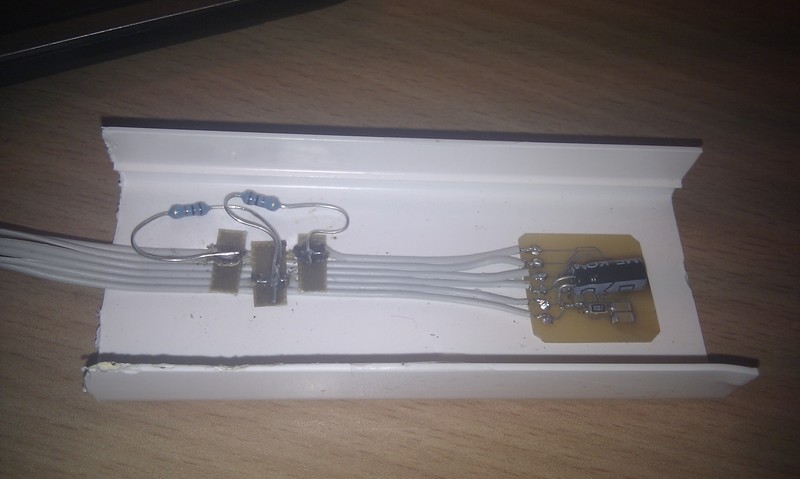
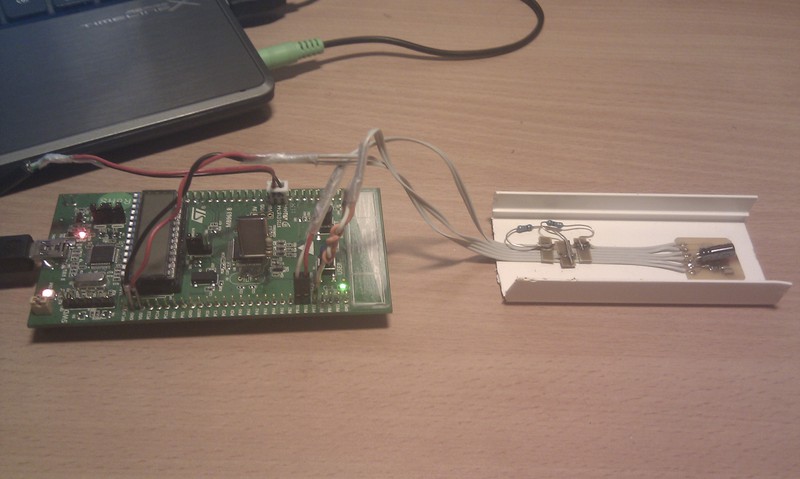
- 電源とI2Cケーブルをブレッドボードに接続します
このためにプログラムで実装する必要があったもの
- I2Cバス上のブレッドボードへの割り込みによるジャイロスコープからのデータの受信。このため、 Stm32周辺ライブラリを使用する必要がありました。
- コンピューターへのデータ転送:ブレッドボードはHIDデバイスとして定義され、ジャイロスコープから生成されたデータパケットをコンピューターに提供します。これには、 STM32L1xx USBフルスピードデバイスライブラリライブラリが使用されました
- HIDデバイスを搭載したコンピューター、PCでデータを受信し、アプリケーションはC#で記述され、HIDデバイスとの通信に役立つライブラリが必要でした。GNUプロジェクト「USB Generic HID Communications 2_0_0_0」はこれに役立ちました
最終的に何が起こったのか
- あるケースでは、ブレッドボードのコントローラーに直接ジャイロスコープからのデータの統合が実装され、さらに角度値がコンピューターに転送されます。ビデオの例を次に示します。
- 実際、ジャイロからのデータは非常にノイズが多く、徹底した数学的処理が必要です。
- 今、より詳細な分析のために、ジャイロスコープからの生データがコンピューターで受信されます。これは次のようになります。
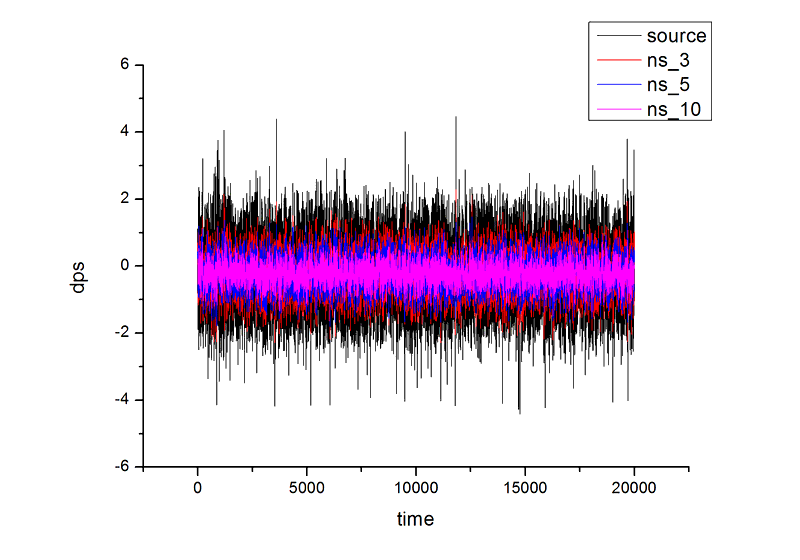 ここでは、生データと移動平均を取得する3つの方法(赤、青、紫)を黒で示し、ジャイロスコープは静止しています
ここでは、生データと移動平均を取得する3つの方法(赤、青、紫)を黒で示し、ジャイロスコープは静止しています
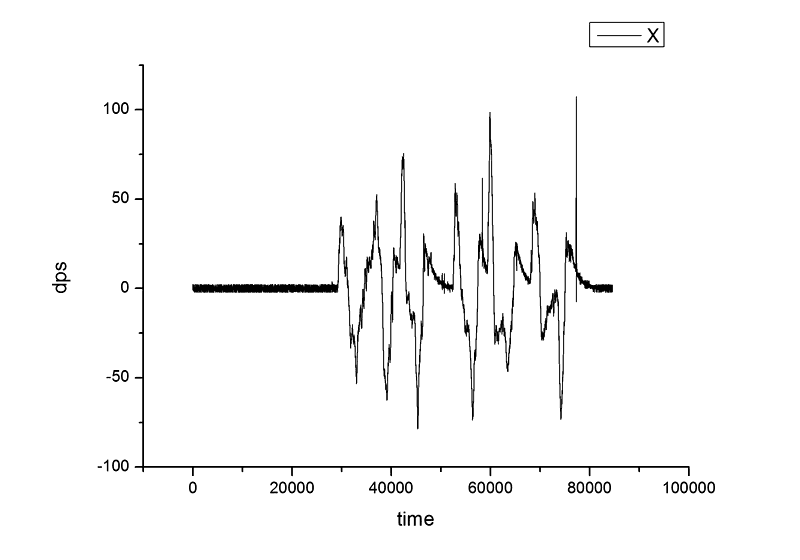 X軸データ、ジャイロスコープの回転
X軸データ、ジャイロスコープの回転
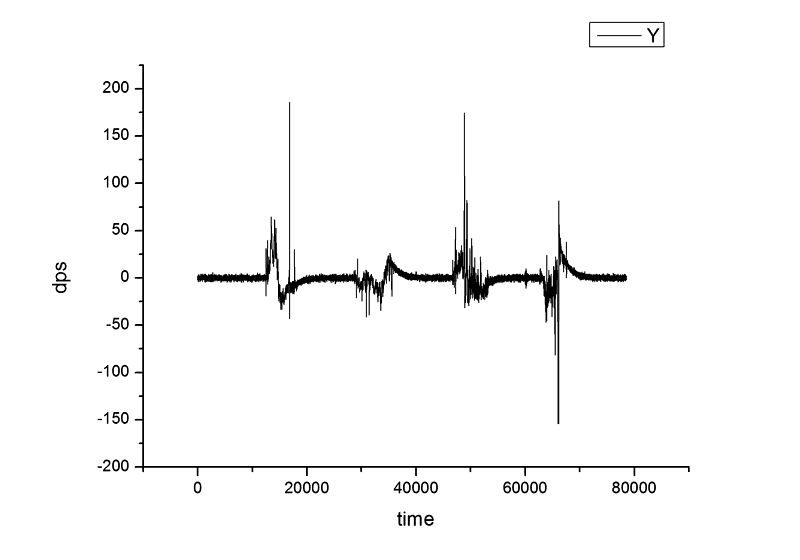 Y軸データ、ジャイロスコープの回転
Y軸データ、ジャイロスコープの回転
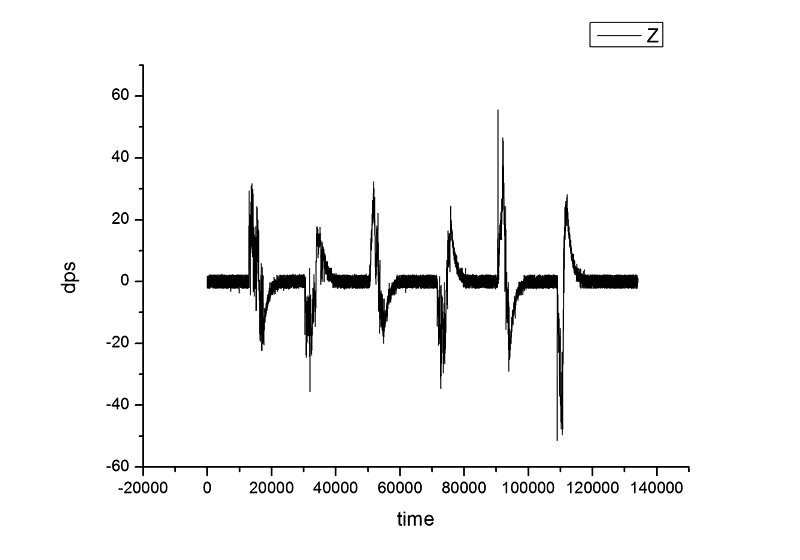 Z軸データ、ジャイロスコープの回転
Z軸データ、ジャイロスコープの回転